Table of Contents
- 1 Product definition
- 2 Installation, electrical connection and operation
- 3 Technical data
- 4 Software description
- 4.1 Software specification
- 4.2 Software "Switch PWM 2068 / 1.0"
- 4.2.1 Scope of functions
- 4.2.2 Notes on software
- 4.2.3 Object table
- 4.2.4 Functional description
- 4.2.4.1 Description of channel-independent functions
- 4.2.4.2 Channel-oriented functional description
- 4.2.4.2.1 Valve direction of action
- 4.2.4.2.2 Reset behaviour
- 4.2.4.2.3 Data formats for command values
- 4.2.4.2.4 Cycle time
- 4.2.4.2.5 Forced position
- 4.2.4.2.6 Cyclical command value monitoring / emergency operation
- 4.2.4.2.7 Command value limit
- 4.2.4.2.8 Status functions
- 4.2.4.2.9 Short-circuit and overload detection
- 4.2.4.2.10 Valve rinsing
- 4.2.4.2.11 Operating hours counter
- 4.2.4.3 Delivery state
- 4.2.5 Parameters
- 5 Appendix
Schneider Electric MTN6730-0001 User Manual
Displayed below is the user manual for MTN6730-0001 by Schneider Electric which is a product in the Electrical Actuators category. This manual has pages.
Related Manuals

Product documentation
Heating Act. REG-K/6x24/230/0.16A
Art. No. MTN6730-0001
Issue: 24.03.2015

Art. No. MTN6730-0001
Table of Contents
Product definition1 4.................................................................................................................
Product catalogue1.1 4...........................................................................................................
Function1.2 4..........................................................................................................................
Installation, electrical connection and operation2 6..............................................................
Safety instructions2.1 6...........................................................................................................
Device components2.2 7........................................................................................................
Fitting and electrical connection2.3 8.....................................................................................
Commissioning2.4 12.............................................................................................................
Operation2.5 13......................................................................................................................
Operating elements2.5.1 13...............................................................................................
Status displays and output behaviour2.5.2 14...................................................................
Operating modes2.5.3 16...................................................................................................
Technical data3 20....................................................................................................................
Software description4 21..........................................................................................................
Software specification4.1 21...................................................................................................
Software "Switch PWM 2068 / 1.0"4.2 22...............................................................................
Scope of functions4.2.1 22.................................................................................................
Notes on software4.2.2 23.................................................................................................
Object table4.2.3 24...........................................................................................................
Objects for device functions4.2.3.1 24...........................................................................
Objects for valve outputs4.2.3.2 29...............................................................................
Functional description4.2.4 34...........................................................................................
Description of channel-independent functions4.2.4.1 34...............................................
Parameter configuration4.2.4.1.1 34.........................................................................
Priorities4.2.4.1.2 35..................................................................................................
Manual operation4.2.4.1.3 37....................................................................................
Service mode4.2.4.1.4 42..........................................................................................
Collective feedback4.2.4.1.5 45................................................................................
Summer / winter switch-over4.2.4.1.6 49..................................................................
Heat requirement and largest command value4.2.4.1.7 50......................................
Pump control4.2.4.1.8 55..........................................................................................
Failure of the valve operating voltage4.2.4.1.9 58.....................................................
Channel-oriented functional description4.2.4.2 60.........................................................
Valve direction of action4.2.4.2.1 60.........................................................................
Reset behaviour4.2.4.2.2 61.....................................................................................
Data formats for command values4.2.4.2.3 64..........................................................
Cycle time4.2.4.2.4 70...............................................................................................
Forced position4.2.4.2.5 73.......................................................................................
Cyclical command value monitoring / emergency operation4.2.4.2.6 75..................
Command value limit4.2.4.2.7 78..............................................................................
Status functions4.2.4.2.8 80......................................................................................
Short-circuit and overload detection4.2.4.2.9 86.......................................................
Valve rinsing4.2.4.2.10 92...........................................................................................
Operating hours counter4.2.4.2.11 96.........................................................................
Delivery state4.2.4.3 100...............................................................................................
KNX
Product documentation
Page 2 of 134

Art. No. MTN6730-0001
Parameters4.2.5 101..........................................................................................................
Appendix5 134...........................................................................................................................
Index5.1 134...........................................................................................................................
KNX
Product documentation
Page 3 of 134

Art. No. MTN6730-0001
1 Product definition
1.1 Product catalogue
Product name: Heating Act. REG-K/6x24/230/0.16A
Use: Actuator
Design: RMD (rail-mounted device)
Art. No. MTN6730-0001
1.2 Function
The heating actuator is used for the activation of electrothermal actuators (ETA) for heating or
cooling systems. It possesses 6 electronic outputs, each of which can silently activate up to 4
(AC 230 V) or 2 (AC 24 V) actuators. Both deenergised closed and deenergised opened
actuators can be connected.
The heating actuator receives 1-bit or 1-byte command value telegrams, transmitted, for
example, by KNX room temperature controllers. The actuator controls its valve outputs either in
switching form or with a PWM signal, according to the data format of the command values and
the configuration in the ETS. The cycle time for constant PWM output signals can be configured
separately for each valve output of the heating actuator. This allows individual adaptation to
different actuator types.
On activation with constant command values, an optional command value limit can be
designed, which allows the limitation of received command values at the "Minimum" and
"Maximum" limits. A minimum command value can be used, for example, for the implementation
of basic heating or cooling. A maximum command value allows the limitation of the effective
command value range, which usually has a positive influence on the lifespan of actuators.
The heating actuator possesses a heat requirement and pump controller. This produces a
positive impact on the energy consumption of a housing or commercial building through the
transmission and evaluation of the largest command value in the heating or cooling system. The
information on the largest active command value can be made available to suitable calorific
furnaces with integrated KNX controller directly via a KNX telegram (1-byte), for example, to
determine the optimum flow temperature. Alternatively or additionally, the heating actuator can
even evaluate the command values of its outputs and make general heat requirement
information available in the form of limiting value monitoring with hysteresis (1-bit, switching).
Using a KNX switch actuator, this allows the energy-efficient activation of burner and boiler
controllers with suitable control inputs (e.g. requirement-orientated switch-over between the
reduction and comfort setpoint in a central combi boiler).
The heating actuator also allows switching activation of the circulation pump of the heating or
cooling circuit via a 1-bit KNX telegram. When using pump control, the pump is only switched on
by the actuator when at least one command value of the outputs exceeds a limiting value with
hysteresis defined in the ETS. The pump is switched off when the limiting value is reached or
undershot again. This saves electrical energy, as the pump is only activated by sufficiently
large, and thus effective, command values. Optional cyclical anti-sticking protection prevents the
sticking of the pump, if it has not been switched on by the command value evaluation for a
longer period of time.
To prevent calcification or sticking of a valve which has not been activated for some time, the
actuator has an automatic valve rinsing function. Valve rinsing can be executed cyclically or
using a bus command, causing the activated valves to run through the full valve stroke for a
preset period of time. If necessary, the intelligent valve rinsing can be enabled. In so doing,
cyclical rinsing using the full stroke is only executed when a defined minimum command value
limiting value was not exceeded during actuator operation.
Cyclical monitoring of the command values can be performed as an option. If, during active
cyclical monitoring, there are no command value telegrams during a preset time, then
emergency operation is activated for the affected valve output, for which a configurable constant
PWM command value can be preset. In addition, it is possible to activate a forced position
separately for each output using a 1-bit KNX object. A defined PWM command value is set at
the appropriate output.
Emergency operation and forced position can also be activated automatically in case of bus
Page 4 of 134
Product definition

Art. No. MTN6730-0001
voltage failure, after bus / mains voltage return or after an ETS programming operation. If
necessary, the command values for emergency operation and the forced position can be
influenced by the summer and winter mode of the actuator, allowing the activation of different
heating or cooling levels according to the season. The actuator permits switch-over between
summer and winter mode at any time using a 1-bit object.
The heating actuator possesses comprehensive feedback and status functions. The active
command value can be made available as status information, transmitting either passively or
actively, separately for each value output. A combined valve status allows the collective
feedback of various functions of an output in a single 1-byte bus telegram.
The actuator is able to detect an overload or a short-circuit at the valve outputs and, in
consequence, to protect them against destruction. Outputs which have experienced a short-
circuit or a constant load are deactivated after an identification period. In this case, a short-
circuit or overload signal can be transmitted via a KNX communication object. The actuator can
also signal a failure of the valve voltage on the KNX.
The switch-on times of the valve outputs can be detected and evaluated separately by operating
hours counters. In addition, service operation is available, which, during maintenance or
installation, can move all assigned actuators to a defined position (completely opened or
completely closed) and can lock them against activation by command value telegrams. Both
service mode and the locking status are preset by a 2-bit forced operation telegram.
The operating elements (4 pushbuttons) on the front panel of the device permit influencing of
the electronic outputs of the actuator through manual operation, even without KNX bus voltage
or in a non-programmed state (switch on and off / PWM). This feature permits a fast function
check of the connected actuators. Moreover, the statuses of the outputs in case of bus voltage
failure or bus or mains voltage return and after ETS programming can be set separately.
The device has a mains voltage connection that is independent of the valve outputs for
supplying the device electronics of the manual operation and integrated bus coupling unit. The
device electronics and bus coupling unit are also supplied from the bus coupling unit so that an
ETS programming operation or manual operation is also possible even if the mains voltage is
not connected or is switched off. As long as the bus voltage is connected and ready for
operation, no power is drawn from the device's internal power supply. This saves electrical
energy.
The valve outputs possess a separate connection for the supply of the connected actuators (AC
24 V or AC 230 V).
The device is designed for mounting on DIN rails in closed compact boxes or in distributors in
fixed installations in dry rooms.
Page 5 of 134
Product definition

Art. No. MTN6730-0001
2 Installation, electrical connection and operation
2.1 Safety instructions
Electrical equipment may only be installed and fitted by electrically skilled persons. The
applicable accident prevention regulations must be observed.
Failure to observe the instructions may cause damage to the device and result in fire and
other hazards.
Danger of electric shock. Device is not suitable for disconnection from supply voltage.
The load is not electrically isolated from the mains even when the device is switched off.
Danger of electric shock. Always disconnect before carrying out work on the devise or
load. At the same time, take into account all circuit breakers that supply dangerous
voltage to the device or load.
Make sure during the installation that there is always sufficient insulation between the
mains voltage and the bus. A minimum distance of at least 4 mm must be maintained
between bus conductors and mains voltage cores.
The device may not be opened or operated outside the technical specifications.
Page 6 of 134
Installation, electrical connection and operation
Art. No. MTN6730-0001
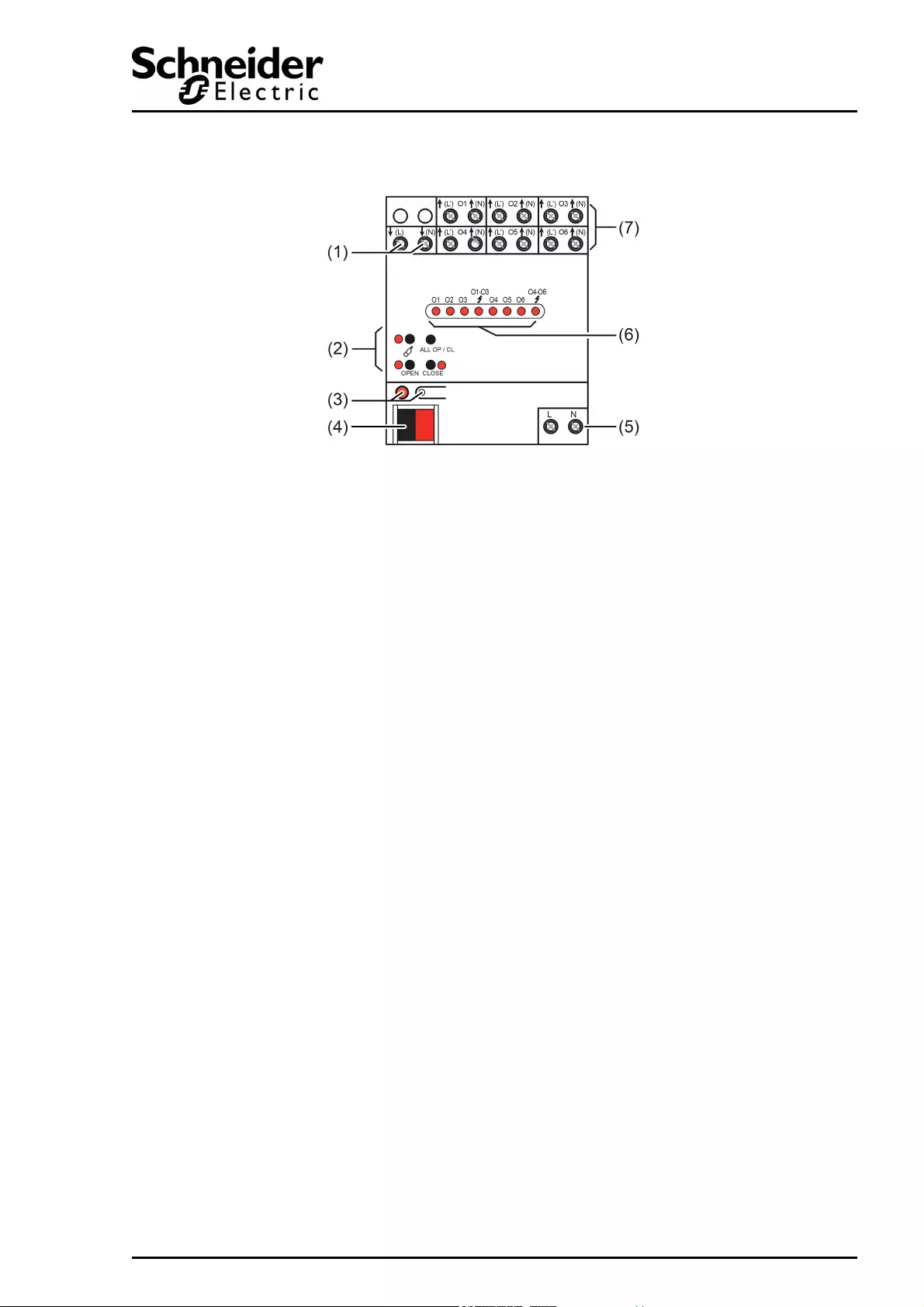
2.2 Device components
Figure 1: Device components
(1) Connection for the supply of electrothermal actuators (AC 230 V or AC 24 V)
(2) Button field for manual operation
(3) Programming button and LEDs
(4) KNX connection
(5) Connection for mains voltage supply (AC 230 V)
(6) Status LEDs for outputs
(7) Connections for electrothermal actuators
Page 7 of 134
Installation, electrical connection and operation
Art. No. MTN6730-0001
2.3 Fitting and electrical connection
DANGER!
Electrical shock when live parts are touched.
Electrical shocks can be fatal.
Before working on the device, disconnect the power supply and cover up live
parts in the working environment.
Fitting the device
oSnap onto a suitable DIN rail. The screw terminals of the valve outputs should be at the
top.
iA KNX data rail is not required.
iObserve the temperature range (see Technical Data) and ensure sufficient cooling, if
necessary.
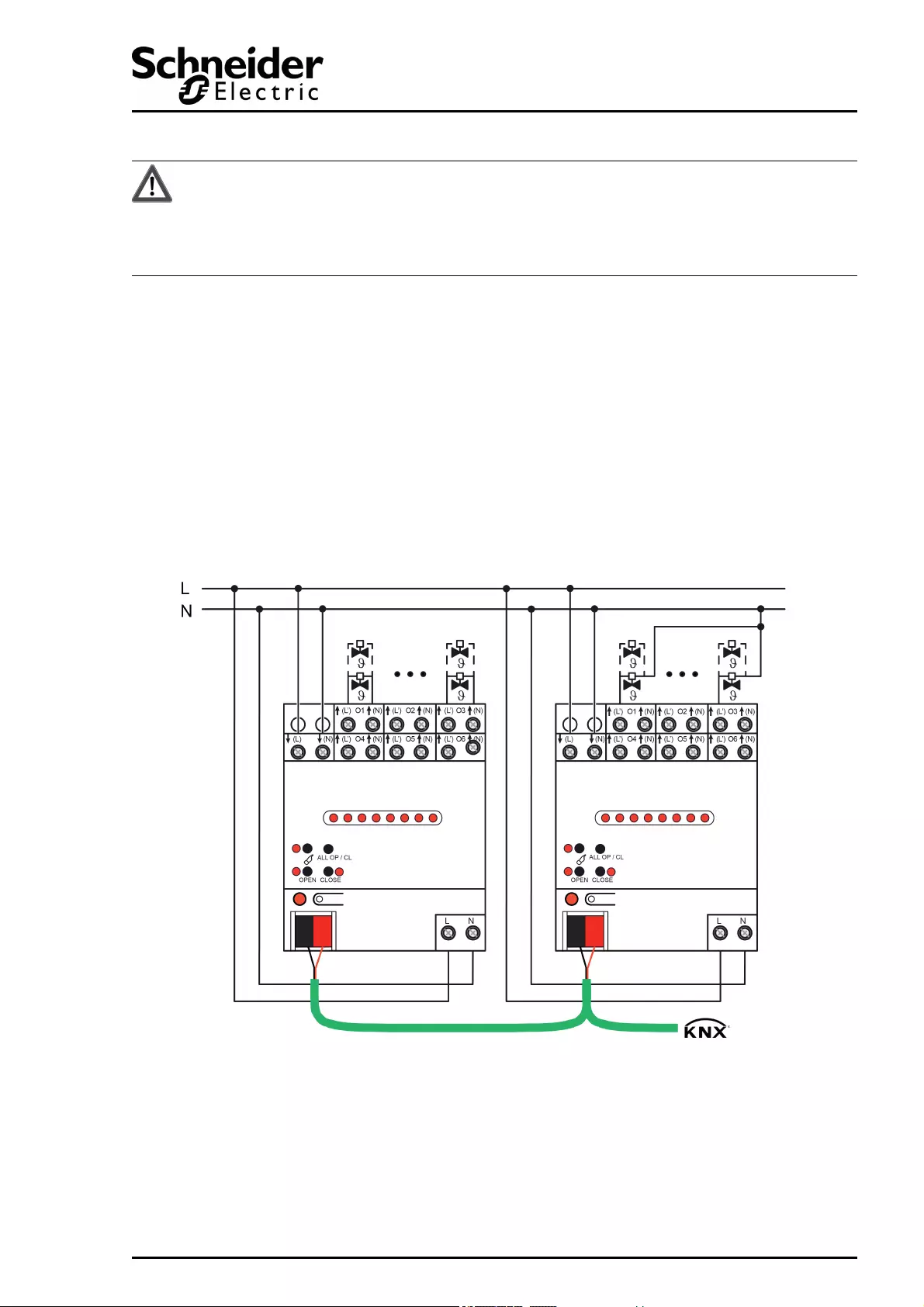
Connect the device for AC 230 V actuators
Figure 2: Connection for AC 230 V actuators (connection examples)
Left: Neutral conductor of the actuators run separately to the actuator /
Right: Shared neutral conductor for actuators
Only connect AC 230 V actuators to all the outputs.
Only connect actuators with the same characteristics to each output (deenergised
closed/opened).
Page 8 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
Do not connect unsuitable loads (incandescent lamps, motorised actuators, signal devices,
etc.).
If possible, connect actuators for environments with increased fail-safety requirements to the
outputs O1 and O4. During overload detection, these are switched off last.
Do not exceed the maximum number of "4" actuators per output.
Observe the technical data of the valve drives used.
oConnect the AC 230 V valve drives according to the connection diagram (Figure 2). The
neutral conductors of the actuators can either be connected directly to the N terminals of
the outputs of the heating actuator (left-hand connection example) or, alternatively, jointly
with a suitable N potential (e.g. N conductor terminal in the distributor) (right-hand
connection example). It is not absolutely necessary to connect the neutral conductor of the
actuators directly to the actuator.
iThe neutral conductor terminals of the valve outputs are bridged internally in the device. Do
not connect the neutral conductor from the output terminals through to additional devices in
the distribution board or to other consumers. Only use the neutral conductor terminals of
the outputs for the connections of the actuators of an actuator.
oConnect the supply (mains voltage AC 230 V) for the actuators to the terminals 8(L) and
8(N) (1).
iDo not connect direct current.
oConnecting the mains voltage to the terminals L N (5).
iThe neutral conductor connection of the mains connection terminal is independent of the N
terminals of the valve outputs.
oConnect bus line with connecting terminal.
Page 9 of 134
Installation, electrical connection and operation
Art. No. MTN6730-0001
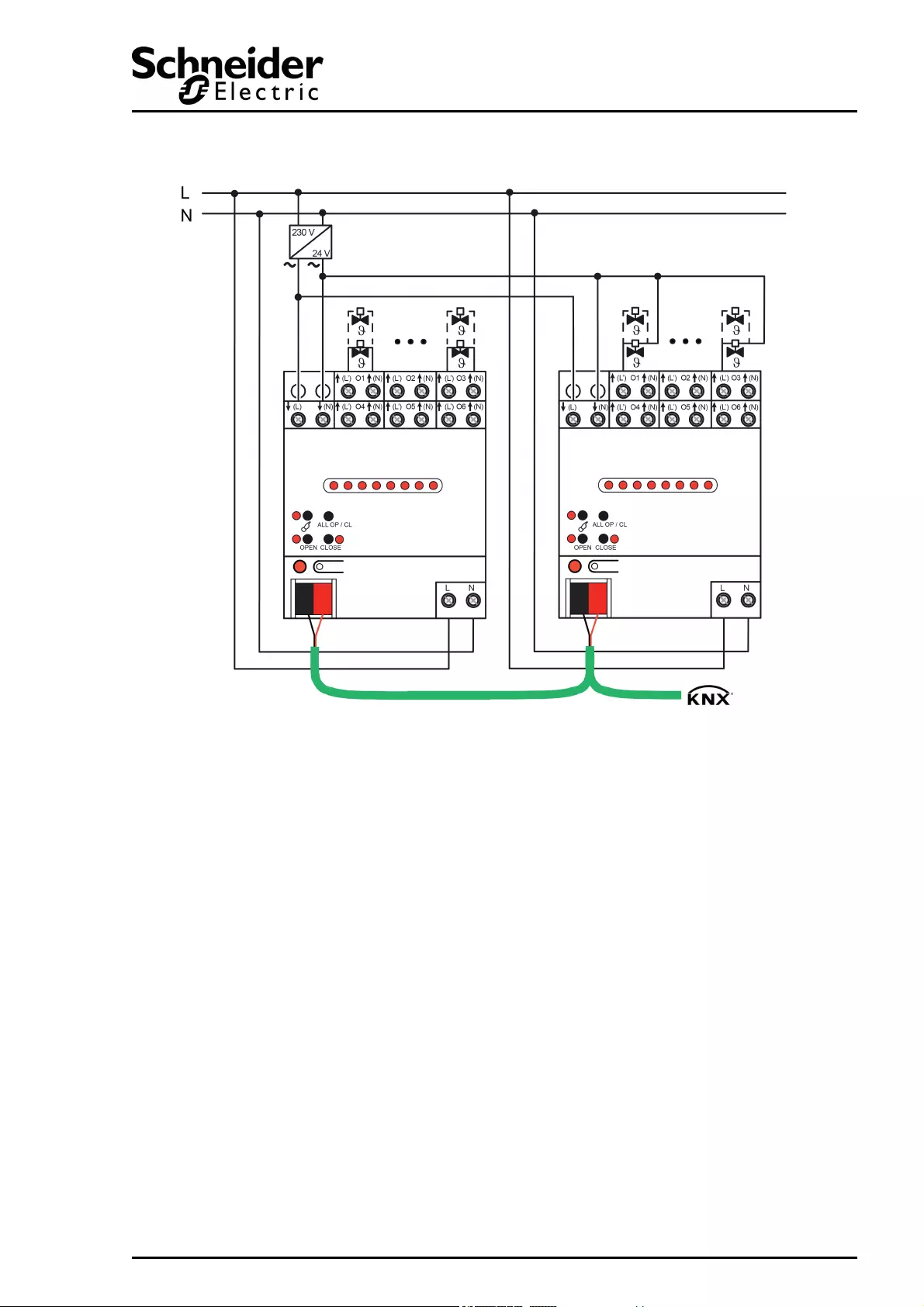
Connect the device for AC 24 V actuators
Figure 3: Connection for actuators AC 24 V
Left: Isolated connection of the actuators, separately on the actuator /
Right: Shared conductor for actuators
Only connect AC 24 V actuators to all the outputs.
Only connect actuators with the same characteristics to each output (deenergised
closed/opened).
Do not connect unsuitable loads (incandescent lamps, motorised actuators, signal devices,
etc.).
If possible, connect actuators for environments with increased fail-safety requirements to the
outputs O1 and O4. During overload detection, these are switched off last.
Do not exceed the maximum number of "2" actuators per output.
Observe the technical data of the valve drives used.
oConnect the AC 24 V valve drives according to the connection diagram (Figure 3). It is
possible to connect the actuators individually and directly with the terminals of the outputs
of the heating actuator (left-hand connection example) or, alternatively, using a shared
conductor (right-hand connection example).
iThe terminals of the valve outputs indicated with "(N)" are bridged internally in the device.
The terminals may only be used for the connection of the actuators of an actuator. Never
connect N potential (mains voltage)!
oConnect the supply for the actuators (AC 24 V) to the terminals 8(L) and 8(N) (1). In so
doing, use a low voltage AC 24 V from a suitable power supply (transformer, mains power
supply).
iDo not connect direct current.
Page 10 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
oConnect mains voltage AC 230 V to the terminals L N (5).
iThe neutral conductor connection of the mains connection terminal is independent of the N
terminals of the valve outputs.
oConnect bus line with connecting terminal.
Page 11 of 134
Installation, electrical connection and operation
Art. No. MTN6730-0001
2.4 Commissioning
After installation of the actuator and connection of the bus line, the mains power supply, the
power supply of the actuators and of all electrical loads, the device can be put into operation.
The following procedure is generally recommended...
Commissioning with the ETS
DANGER!
Electrical shock when live parts are touched.
Electrical shocks can be fatal.
Before working on the device, disconnect the power supply and cover up live
parts in the working environment.
oSwitch on the bus voltage. Make sure that the bus voltage is available interruption free
during the commissioning.
iThe device has a mains voltage connection that is independent of the valve outputs for
supplying the device electronics of the manual operation and integrated bus coupling unit.
The device electronics and bus coupling unit are also supplied from the bus coupling unit
so that an ETS programming operation or manual operation is also possible even if the
mains voltage is not connected or is switched off. As long as the bus voltage is connected
and ready for operation, no power is drawn from the device's internal power supply. This
saves electrical energy.
Check: When the programming button is pressed, the red programming LED must light up.
oConfigure and program the physical address with the help of the ETS.
oDownload the application data with the ETS.
The device is ready for operation.
iWhen the mains supply is on, the valve outputs of the actuator can be switched via manual
operation, even if there is no bus voltage or if the actuator is not yet programmed. Due to
this feature, the actuators connected to the individual outputs can be checked for proper
functioning already during construction site operation.
Page 12 of 134
Installation, electrical connection and operation
Art. No. MTN6730-0001
2.5 Operation
2.5.1 Operating elements
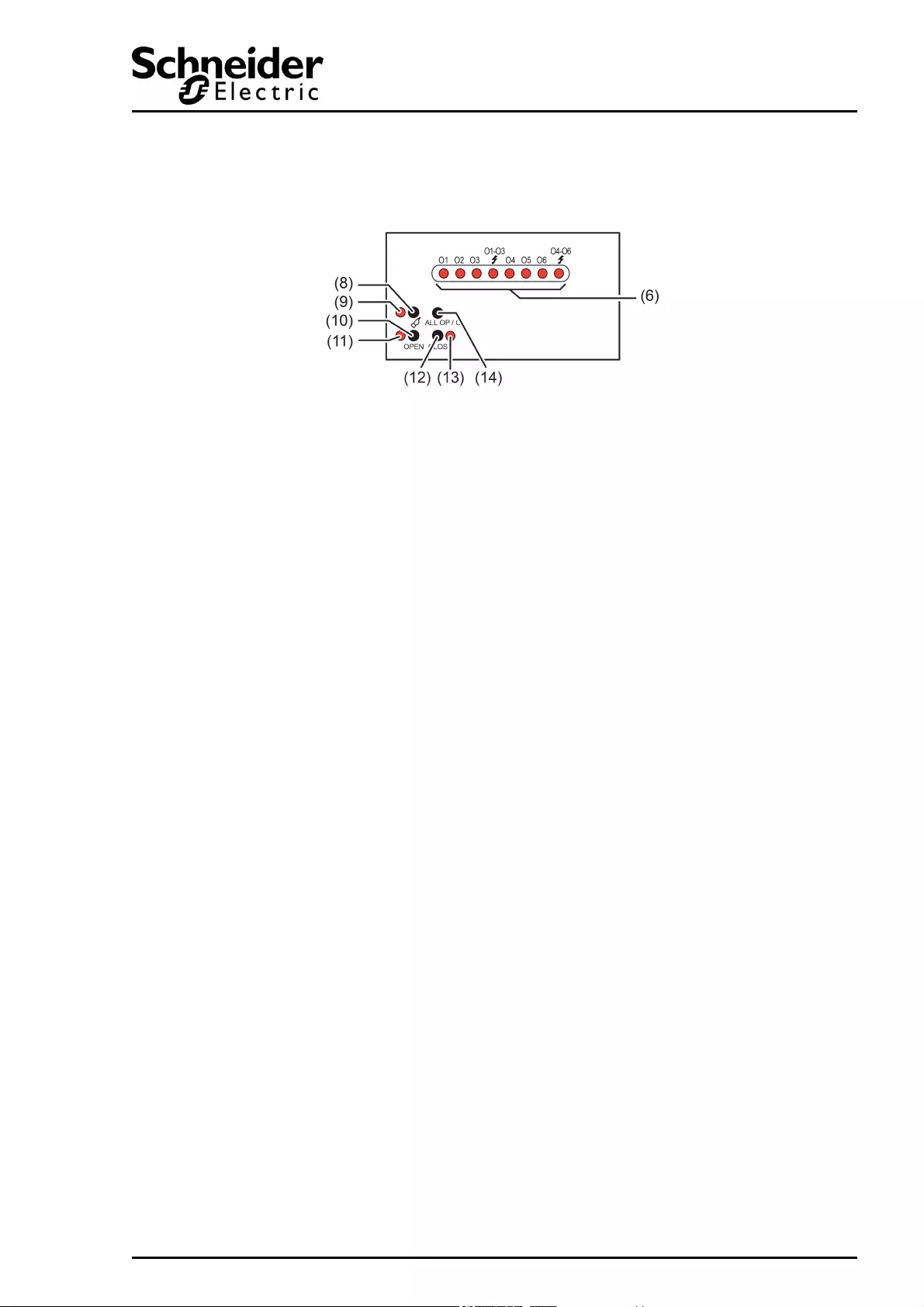
Figure 4: Controls and indicators on the front panel of the device
(6) O1...O6: Status LEDs of the valve outputs (LEDs light up when outputs are energised)
ŋO1-O3, ŋO4-O6: Display "Overload/short-circuit" for appropriate output group
(8) Button c:Activation / deactivation of manual control.
(9) LED c: Indicates permanent manual operation when ON.
(10) OPEN button: Open valve (configured valve direction of action is taken into account)
(11) OPEN LED: When ON in manual operation, signals an opened or opening valve
(12) CLOSE button: Close valve (configured valve direction of action is taken into account)
(13) CLOSE LED: When ON in manual operation, signals a closed or closing valve
(14) ALL OP / CL button: Central operating function for all valve outputs. Open and close all the
valves alternately.
iOPEN (10) and CLOSE (13) LEDs: The LEDs light up statically during manual operation,
showing the valve status set or to be set (valve is closed or closing / valve is opened or
opening). Even on valve outputs working with an 8-bit command value (PWM), the LEDs
display the logical valve state statically in the same way. The LEDs do not signal the
dynamic switch-on and switch-off phases of the pulse width modulation.
If no valve voltage is connected or switched on at the terminals 8(L) and 8(N), then the
LEDs are also always switched off, even if bus voltage or mains voltage is available
(terminals L N), as the valve outputs cannot be energised.
Page 13 of 134
Installation, electrical connection and operation
Art. No. MTN6730-0001
2.5.2 Status displays and output behaviour
Status indication
The Status LEDs O1...O6 show whether the current flow is switched on or switched off at the
appropriate output. The connected heating or cooling valves open and close according to their
characteristics.
Valve drive LED ON LED OFF
Deenergised closed Output energised
Valve opened / Opening phase
Active heating or cooling
Output not energised
Valve closed / Closing phase
Deenergised opened Output energised
Valve closed / Closing phase
Output not energised
Valve opened / Opening phase
Active heating or cooling
Status display according to the energisation state of the valve outputs
iIn the case of valve outputs working with an 8-bit command value (PWM), the LEDs
dynamically display the switch-on and switch-off phases of the pulse width modulation.
iIf no valve voltage is connected or switched on at the terminals 8(L) and 8(N), then all the
status LEDs are also always switched off, even if bus voltage or mains voltage is available
(terminals L N), as the valve outputs cannot be energised.
iOn the LED status display, the valve direction of action configured for each output in the
ETS is not taken into account. As a result, the LEDs do not immediately display the valve
state (opened / closed). Inversion of the status display according to the valve direction of
action thus does not take place.
Short-circuit / overload display
In order to protect the device and connected actuators, in case of overload the device
determines which output is involved and switches it off. Non-overloaded outputs continue to
work, which means that the corresponding rooms are still heated or cooled.
- In the case of short-circuits or overloads, the actuator first switches off the affected output
groups O1...O3 or O4...O6.
- The actuator determines the overloaded or short-circuited output in up to 4 testing cycles.
- If, in the event of only a minor overload, it is not possible to unambiguously identify any
output as overloaded, then the actuator switches individual outputs of the overloaded group
off one after the other.
- A detected overload or a detected short-circuit can be sent separately to the KNX using a
1-bit signal telegram for each valve output.
The status LEDs ŋO1-O3 or ŋO4-O6 on the front panel of the device flash slowly during the
time of an overload or short-circuit identification (1 Hz) to signalise that the output groups are
temporarily deactivated. The LEDs flash quickly when the actuator has safely identified all or
individual valve outputs of the affected group as overloaded or having short-circuited.
iIn the testing phase of a short-circuit/overload detection, the outputs of the affected
group(s) cannot be selected during manual operation.
iThe testing cycle is explained in detail in the "Software description" chapter of this
documentation.
Page 14 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
Activation of the outputs in manual mode
During manual operation, all the valve outputs are activated with a pulse width modulation
(PWM) using the OPEN button, irrespective of the configured command value data format (1-bit
or 1-byte). The cycle time of the PWM signal for a valve output activated by manual operation is
configured centrally on the parameter page "Manual operation" in the ETS. In consequence, a
manual operation locally on the device can allow the use of a different cycle time than in normal
operation of the actuator (activation via KNX telegrams). The CLOSE command always closes
the valves completely (0 %).
An exception is the central operating function of all valve outputs with the ALL OP / CL button.
Here, the actuator always activates the valve outputs with a constant signal (0 % or 100 %).
In manual operation, the configured valve direction of action (deenergised closed / deenergised
opened) is taken into account during valve activation. With deenergised closed valves, the
switch-on time is derived directly from the configured PWM and the cycle time. Example: PWM
= 30 %, cycle time = 10 minutes -> Switch-on time = 3 minutes, switch-off time = 7 minutes.
In the case of deenergised opened valves, the switch-on time is inverted. Example: PWM = 30
%, cycle time = 10 minutes -> Switch-on time = 7 minutes, switch-off time = 3 minutes.
iPressing the OPEN button when valves are already opened produces no reaction. The
cycle time of a PWM signal is not restarted. On previously closed valves, pressing the
CLOSE button also does not produce a reaction.
iAfter permanent manual operation has been switched on, the states of the outputs last set
initially remain active. However, for opened valve outputs, the pulse width modulation is
automatically adjusted to the preset value of manual operation.
After temporary manual operation is switched on, the states of the outputs last set also
initially remain active. However, for opened valve outputs, the pulse width modulation is not
adjusted to the preset value of manual operation. This only takes place when the valves
are first closed and then reopened, in the course of brief manual operation.
iIn the state as supplied, the valve direction of action for all the valve outputs is set to
"Deenergised closed". The actuator then works with a PWM of 50 % and a cycle time of 20
minutes.
First Open function
In most cases, deenergised closed actuators possess the "First Open function". Such an
actuator must, before it can be used normally in combination with the heating actuator, be
energised for a specific period during the first electrical commissioning, in order to deactivate an
internal mechanical block.
Normally, an intact block in the as-delivered state of the drives means that the actuator does not
close fully. This means that the flow rate of the actuators and the hydraulic system can be
checked as part of installation and commissioning, even without electrical actuation of the
drives. An additional advantage is that the small opening of the valve in the as-delivered state
means that systems can heat or cool in a restricted area (frost/heat protection), without the
existence of a functioning room temperature control.
iDeenergised closed actuators with the First Open function are not usually completely
closed in the as-delivered state. Such drives must be unlocked using the First Open
function, thus activating them for use by the heating actuator.
The activation of the actuators for the execution of the First Open function is easily possible
using manual operation of the heating actuator (in construction site mode, only through an
applied mains and valve power supply). In the as-delivered state, the actuator works with a
PWM of 50 % and a cycle time of 20 minutes. This produces a switch-on time of 10 minutes,
when the command "Open valve" is executed in manual operation. This time is sufficiently long
to execute the First Open function properly. In the ETS, both the cycle time and the PWM of
manual operation can be configured and thus adjusted to a desired value.
Alternatively, the central operating function can be used with the ALL OP / CL button to execute
the First Open function. In so doing, all the valve outputs execute the open or close command
simultaneously (depending on the most recent presetting).
Page 15 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
2.5.3 Operating modes
The manual operation of the actuator distinguishes between the following operating modes...
- Bus operation: Operation via room temperature controllers, push-buttons, or other bus
devices,
- Temporary manual control: manual control locally with keypad, automatic return to bus
control,
- Permanent manual operation: Exclusively manual operation on the device (e.g.
construction site mode, commissioning phase).
iWhen manual control is active, the outputs cannot be controlled via the bus.
iIn cases of bus voltage failure, manual operation is possible, provided that the mains
voltage supply of the actuator (terminals L N) is switched on. On bus voltage return,
manual operation can be terminated (central reset function) or continued without
interruption, depending on the configuration.
iIn manual mode, bus operation can be disabled via a telegram. Manual control is
terminated on activation of the disabling function.
iNo manual operation of the device is possible if the actuator is programmed by the ETS
with an incorrect application program or if the application program was unloaded. In the
state of the actuator as supplied, manual control can be used even before commissioning
via the ETS (building site operation).
iFurther details concerning manual operation, especially with respect to the possible
parameter settings and the interaction with other functions of the actuator, can be found in
chapter 4 "Software description" of the present documentation.
Switching on the temporary manual control
Manual operation is enabled in the ETS and not blocked.
oPress the c button briefly.
Temporary manual control is active.
The status LED O1 flashes. The LED c remains off.
iAfter the temporary manual operation is switched on, the most recently set states of the
outputs initially remain active. For opened valve outputs, the pulse width modulation is not
adjusted to the preset value of manual operation. This only takes place when the valves
are first closed and then reopened, in the course of brief manual operation.
iAfter 5 seconds without a button-press, the actuator returns automatically to bus operation.
Switching off temporary manual operation
The device is in short-term manual mode.
oNo button-press for 5 seconds.
- or -
oSelect all outputs one after another by a brief press of the c button. Thereafter, press the
key once again.
- or -
oSwitch off the mains voltage and the bus voltage.
- or -
oOn bus voltage return when mains voltage is available, although only when the parameter
"Response of the manual operation to bus voltage return" is configured as "Exit manual
operation".
Page 16 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
Bus operation is active. LEDs O1...O6 no longer flash, but rather indicate the output status,
provided that the valve power supply and the bus or mains voltage is switched on.
iManual operation is always exited after an ETS programming operation.
iThe state of all outputs set via manual control is not changed when temporary manual
control is switched off. If, however, a function with a priority higher than that of normal
operation (e.g. forced position, safety operation) was activated for the valve outputs via the
bus before or during manual operation, the actuator executes the function with the higher
priority for the outputs concerned.
Switching on permanent manual control
Manual operation is enabled in the ETS and not blocked.
Bus operation or temporary manual control is active.
oPress the c button for at least 5 seconds.
Permanent manual operation is active and the LED c is illuminated. The status LED O1
flashes. The two status LEDs OPEN and CLOSE show the current status of O1.
iAfter permanent manual operation has been switched on, the states of the outputs last set
initially remain active. However, for opened valve outputs, the pulse width modulation is
automatically adjusted to the preset value of manual operation.
Switching off permanent manual control
The device is in continuous manual mode.
oPress the c button for at least 5 seconds.
- or -
oSwitch off the mains voltage and the bus voltage.
- or -
oBlock manual operation via the corresponding disabling object,
- or -
oOn bus voltage return when mains voltage is available, although only when the parameter
"Response of the manual operation to bus voltage return" is configured as "Exit manual
operation".
Bus operation is active. LEDs O1...O6 no longer flash, but rather indicate the output status,
provided that the valve power supply and the bus or mains voltage is switched on.
iManual operation is always exited after an ETS programming operation.
iDepending on the configuration of the actuator in the ETS, the outputs will be set to the
state last adjusted in the manual operation or to the state internally tracked (e.g. forced
position, service operation) when permanent manual operation is switched off.
Operating the outputs
In manual operation the outputs can be operated instantly. The outputs are always activated
with pulse width modulation by manual operation with the OPEN command. The cycle time of
the PWM signal for a valve output activated by manual operation is configured centrally on the
parameter page "Manual operation" in the ETS. The CLOSE command closes the valves
completely (0 %).
The device is in continuous or short-term manual mode.
oPress c button briefly, < 1 s, as many times as necessary until the desired output is
selected.
Page 17 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
The LED of the selected output O1...O6 flashes. Additionally, the status of the selected
output is indicated by the LED OPEN or CLOSE.
oPress the OPEN button.
The valve opens (configured valve direction of action is taken into account).
oPress the CLOSE button.
The valve closes (configured valve direction of action is taken into account).
The LEDs OPEN and CLOSE display the valve status.
iShort-term manual operation: After running through all of the outputs, the device exits
manual operation after another brief press of the c button.
iExecuting the OPEN command when valves are already opened causes no reaction. The
cycle time of a PWM signal is not restarted. On previously closed valves, pressing the
CLOSE button also does not produce a reaction.
iDepending on the parameter configuration in the ETS, feedback telegrams are transmitted
to the bus via the status objects of an output during operation, as necessary.
Operate all outputs simultaneously
All the valve outputs of the actuator can be activated at the same time. In contrast to the
operating function using the OPEN or CLOSE buttons, the actuator always activates the valve
outputs with a constant signal (0 % or 100 %), when they are activated simultaneously. Thus,
the valves close or open completely. No pulse width modulation is executed.
This operating function is particularly practical for performing the First Open function of
deenergised closed valves during first commissioning.
The device is in continuous manual mode.
oPress the ALL OP / CL button.
Each time the button is pressed, the valves open and close alternately (all open -> all close
-> all open...). The configured valve direction of action is taken into account.
iExecuting the OPEN central command when valves are already opened causes PWM to
be terminated. The command value switches to 100 %. The cycle time of a PWM signal is
not restarted. On previously closed valves, executing the CLOSE central command does
not produce a reaction.
iThe ALL OP / CL button has no function in temporary manual operation. In this case
pressing this button produces no reaction.
Disabling bus control of individual outputs manually
It is possible to use manual operation to disable selected valve outputs in such a way that they
can no longer be activated via the bus.
The device is in continuous manual mode.
Disabling of the bus control mode must have been enabled in the ETS.
oPress c button briefly as many times as necessary until the desired output is selected.
The status LED of the selected output O1...O6 flashes. The two status LEDs OPEN and
CLOSE show the current status of the selected output.
oPress the OPEN and CLOSE buttons simultaneously for at least 5 seconds.
The selected valve output is disabled (activation via the bus no longer possible). The status
LED of the disabled output flashes quickly and constantly (even with manual operation
deactivated).
Page 18 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
iAn output that has been disabled in manual control can thereafter only be operated in
permanent manual control.
Cancelling the disabling of bus control of individual outputs via manual operation
The device is in continuous manual mode.
Bus control of a valve output has been disabled previously in permanent manual operation.
oPress c button briefly as many times as necessary until the desired output is selected.
The status LED of the selected output O1...O6 flashes quickly. The two status LEDs OPEN
and CLOSE show the current status of the selected output.
oPress the OPEN and CLOSE buttons simultaneously for at least 5 seconds.
Selected output is enabled.
The selected valve output is re-enabled (activation via the bus is possible again after
manual operation has been deactivated).
The status LED of the enabled output flashes slowly.
Page 19 of 134
Installation, electrical connection and operation

Art. No. MTN6730-0001
3 Technical data
General
Ambient temperature -5 ... +45°C
Storage/transport temperature -25 ... +70°C
Fitting width 72mm / 4modules
Mark of approval KNX/EIB
Standby power max. 0.4W
Power loss max. 1W
KNX supply
KNX medium TP
Commissioning mode S-mode
Rated voltage KNX DC 21 ... 32VSELV
Power consumption KNX max. 250mW
Device power supply AC 230 V (L, N)
Rated voltage AC 110 ... 230V~
Mains frequency 50 / 60Hz
Power supply of valve outputs AC 230 V
Rated voltage AC 230 V ~
Power supply of valve outputs AC 24 V
Rated voltage AC 24 V ~
Valve outputs
Contact type Semi-conductor (Triac), ε
Switching voltage AC 24 / 230V ~
Switching current 5 ... 160mA
Switch-on current max. 1.5A (2 sec)
Switch-on current max. 0.3 A (2 min)
Number of drives per output
230 V drives max. 4
24 V drives max. 2
Connections
Connection mode Screw terminal
Connection type for bus Connection terminal
single stranded 0.5 ... 4mm²
finely stranded without conductor sleeve 0.5 ... 4mm²
Finely stranded with conductor sleeve 0.5 ... 2.5mm²
Page 20 of 134
Technical data
Art. No. MTN6730-0001
4 Software description
4.1 Software specification
ETS search paths: 7.1 Heating/Single Room Thermostat / / Heating Act. REG-
K/6x24/230/0.16A
7.1.13 Heating/Switch actuator / Heating Act. REG-
K/6x24/230/0.16A
PEI type: "00"Hex / "0" Dec
PEI connector: no connector
Application:
No. Short description Name Version from mask
version
1 Multifunctional heating actuator
application:
Activation of up to 6 valve outputs for
electrothermal actuators. With manual
control.
Switch PWM 2068 /
1.0
1.0
for ETS3.0,
Version d
onwards,
ETS4
Version
4.1.7
onwards,
and ETS5
SystemB
(07B0)
Page 21 of 134
Software specification

Art. No. MTN6730-0001
4.2 Software "Switch PWM 2068 / 1.0"
4.2.1 Scope of functions
- 6 independent electronic valve outputs.
- Valve activation (deenergised opened / closed) can be configured for each output.
- Actuator evaluation as "Switching, 1-bit", "Constant, 1-byte" or "Constant 1-byte with
actuator limiting value and hysteresis".
- With a 1-byte command value, the outputs are activated by pulse width modulation (PWM).
The cycle time can be configured for each valve output.
- Status feedback (1 bit or 1 byte) of each output possible automatically or on read request.
- Collective feedback of all valve states possible via 4-byte telegram.
- A combined valve status allows the collective feedback of various functions of an output in
a single 1-byte bus telegram.
- Failure signal of the valve operating voltage can be configured (1-bit).
- Overload and short-circuit signal can be set separately via a 1-bit object for each valve
output (polarity can be configured). Global reset of all short-circuit / overload signals
possible.
- Heat requirement and pump control, for positive influencing of the energy consumption of a
housing or commercial building. Provision of the largest active command value directly via
KNX telegram (1-byte constant). Alternatively or additionally, evaluation of the actuator
command values for provision of the general heat requirement information in the form of
limiting value monitoring with hysteresis (1 bit switching). Activation of a circulation pump of
the heating or cooling circuit via a 1-bit KNX telegram with limiting value evaluation.
Optional cyclical anti-sticking protection prevents the sticking of the pump.
- Summer or winter mode can be selected via an object (polarity configurable).
- Each valve output can be locked in a forced position with bus control. Different command
values can be configured for summer and winter mode.
- Cyclical monitoring of the command value of each output can be set, taking into account a
configurable monitoring time. If no telegram is received within the preset monitoring time,
the valve output concerned switches to emergency operation. Different command values
can be configured for summer and winter mode. The fault telegram is configurable.
- On activation with constant command values, an optional command value limit can be
designed, which allows the limitation of received command values at the "Minimum" and
"Maximum" limits.
- Automatic valve rinsing to prevent calcification or sticking of a valve which has not been
activated for some time.
- Operating hours counter to record the switch-on times of the valve outputs.
- Service mode for the maintenance or installation of valve drives (locking of the valve
outputs in a defined state). Both service mode and the locking status are preset by a 2-bit
forced operation telegram.
- Manual operation of outputs independent of the KNX (for instance, construction site mode)
with LED status indicators. Separate status feedback to the KNX for manual operation.
Manual operation can also be disabled via the KNX. Own cycle time and PWM setting for
manually-operated valve outputs. Central activation of all valve outputs (0 % / 100 %).
- Behaviour in case of bus voltage failure and bus voltage return as well as after ETS
programming settable for each valve output.
- Various actively transmitting feedback or status signals can be delayed globally after bus
voltage return or after an ETS programming operation.
- The parameters of the outputs can be set individually (each valve output possesses its own
parameters) or globally (all the valve outputs are configured in the same way with a single
configuration).
Page 22 of 134
Software "Switch PWM 2068 / 1.0"
Scope of functions
Art. No. MTN6730-0001
4.2.2 Notes on software
ETS project design and commissioning
For project design and commissioning of this device, we recommend using the ETS4 of Version
4.1.7 onwards or ETS5. Project designing and commissioning of the device using ETS3 of
version "d" or higher is also possible.
Safe-state mode
If the device - for instance as a result of errors in the project design or during commissioning -
does not work properly, the execution of the loaded application program can be halted by
activating the safe-state mode. In safe-state mode, activation of the valve outputs via the KNX
or manual operation is not possible. The actuator remains passive in safe-state mode, since the
application program is not being executed (state of execution: Terminated). Only the system
software is still functional so that the ETS diagnosis functions and also programming of the
device continue to be possible.
Activating the safe-state mode
oShut off the bus and the mains voltage supply. Wait a bit.
oPress and hold down the programming button.
oSwitch on the bus or mains voltage. Release the programming button only after the
programming LED starts flashing slowly.
The safe-state mode is activated. With a new brief press of the programming button, the
programming mode can be switched on and off as usual also in the safe-state mode. The
programming LED stops flashing. However, safe-state mode remains active.
iThe safe-state mode can be terminated by switching off the supply voltage (bus and mains)
or by programming with the ETS.
Unloading the application program
The application program can be unloaded with the ETS. In this case the device is without
function. Manual operation is no longer possible.
Page 23 of 134
Software "Switch PWM 2068 / 1.0"
Notes on software
Art. No. MTN6730-0001
4.2.3 Object table
Number of communication objects: 104
(max. object number 284 - gaps in between)
Number of addresses (max.): 760
Number of assignments (max.): 760
4.2.3.1 Objects for device functions
Function: Monitoring of the operating voltage
Object
h1
Function
Failure of operating voltage
Name
Valve outputs -
Output
Type
1-bit
DPT
1,005
Flag
C, -, T, R
Description 1-bit output object to signal a failure of the operating voltage (AC 24 V or
AC 230 V) of the valve outputs. The telegram polarity can be configured.
Function: Pump control
Object
h2
Function
Switch pump
Name
Pump - output
Type
1-bit
DPT
1,001
Flag
C, -, T, R
Description 1-bit output object for direct activation of a circulation pump of the heating or
cooling system. The pump is only switched on by the actuator when at least
one command value of the assigned outputs exceeds a limiting value with
hysteresis defined in the ETS. The pump is switched off when the limiting
value is reached or undershot again. In addition, the actuator can optionally
evaluate an external telegram (object 3).
The telegram polarity can be configured. After bus voltage return and an ETS
programming operation, the actuator always first transmits the status "Pump
OFF" without a delay. The actuator then updates the status to "Pump ON",
providing that the condition for this has been fulfilled and an optionally
configured "Pump delay ACTIVE" has elapsed.
Function: Pump control
Object
h3
Function
External pump control
Name
Pump - input
Type
1-bit
DPT
1,001
Flag
C, W, -,
(R)1
Description 1-bit input object for the cascading of multiple actuators with pump control.
The transmitting operation for the pump control of another heating actuator
can be connected to this object. The local heating actuator links the external
telegram with the internal status of the pump logically as OR and outputs the
result of this link via the object 2.
In this case, the telegram polarity is fixed: "0" = Pump OFF, "1" = Pump ON.
Cyclical telegrams to this object with an identical telegram polarity (ON -> ON,
OFF -> OFF) produce no reaction. After a device reset, there is no polling of
the current status of this object. Only when a bus telegram is received does
the actuator take this status into account when activating the pump.
1: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 24 of 134
Software "Switch PWM 2068 / 1.0"
Object table

Art. No. MTN6730-0001
Function: Evaluation of the largest command value
Object
h4
Function
Largest command value
Name
Valve outputs -
Output
Type
1 byte
DPT
5,001
Flag
C, -, T, R
Description 1-byte output object for transmission of the largest constant command value of
the heating actuator to another bus device (e.g. suitable calorific furnaces with
integrated KNX controller or visualisation). The heating actuator evaluates all
the active 1-byte command values of the valve outputs and, optionally, the
externally received largest command value (object 5) and transmits the largest
command value via this object.
In the case of valve outputs configured in the ETS to the command value data
formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting
value", there is no evaluation of the command values preset via the bus.
Exception: It may also occur with such command value outputs that a constant
command value is active (e.g. after bus/mains voltage return or a forced
position and emergency operation or manual operation). In this case, this
constant command value is also included in the calculation of the largest
command value until the named functions with a higher priority are exited or a
new command value telegram is received via the bus, overriding the constant
command value at the valve output.
After bus voltage return and an ETS programming operation, the actuator
transmits the current value of the largest command value without a delay,
providing that automatic transmission on change is configured. After a full
device reset, the actuator does not transmit automatically, when all the
command values are set to 0 %.
After a device reset, the actuator immediately starts the time for cyclical
transmission (if configured), so that the object value effective after the reset is
transmitted cyclically.
Function: Evaluation of the largest command value
Object
h5
Function
External largest command
value
Name
Valve outputs -
Input
Type
1 byte
DPT
5,001
Flag
C, W, -, (R)
1
Description 1-bit input object for the cascading of multiple actuators with evaluation of the
largest constant command value. The transmitting object of a largest
command value of another heating actuator can be connected to this object.
The local heating actuator monitors the external telegram with its own active
constant command values and outputs the largest of all command values via
object 4.
Cyclical telegrams to this object with the same value cause no reaction. After
a device reset, there is no polling of the current status of this object. Only
when a bus telegram is received does the actuator take this status into
account during evaluation.
1: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 25 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
Function: Heat requirement signal
Object
h6
Function
Heat requirement
Name
Valve outputs -
Output
Type
1-bit
DPT
1,002
Flag
C, -, T, R
Description 1-bit output object for the transmission of general heat requirement information
to suitable burner and boiler controllers. A heat requirement is only signalled
by the actuator when at least one command variable of the assigned outputs
exceeds a limiting value with hysteresis defined in the ETS. A heat
requirement signal is retracted when the limiting value is reached or undershot
again. In addition, the actuator can optionally evaluate an external telegram
(object 7).
The telegram polarity can be configured. After bus voltage return and an ETS
programming operation, the actuator always first transmits the status "No heat
requirement" without a delay. The actuator then updates the status to "Heat
requirement", providing that the condition for this has been fulfilled and an
optionally configured "Heat requirement ACTIVE" has elapsed.
Function: Heat requirement signal
Object
h7
Function
External heat requirement
Name
Valve outputs -
Input
Type
1-bit
DPT
1,002
Flag
C, W, -,
(R)1
Description 1-bit input object for the cascading of multiple actuators with a heat
requirement signal. The transmitting object of a heat requirement signal of
another heating actuator can be connected to this object. The local heating
actuator links the external telegram with the internal status of its own heat
requirement logically as OR and outputs the result of this link via the object 6.
In this case, the telegram polarity is fixed: "0" = Heat requirement INACTIVE,
"1" = Heat requirement ACTIVE.
Cyclical telegrams to this object with an identical telegram polarity (ON -> ON,
OFF -> OFF) produce no reaction. After a device reset, there is no polling of
the current status of this object. Only when a bus telegram is received does
the actuator take this status into account during evaluation of the heat
requirement.
Function: Toggling of the Summer / Winter operating mode
Object
h8
Function
Summer / winter change-over
Name
Operating mode -
input
Type
1-bit
DPT
1,002
Flag
C, W, -, (R)
1
Description 1-bit input object to switch over between summer and winter mode. The
telegram polarity can be configured. The status is stored internally in the
device if there is a bus or mains voltage failure and is restored after a device
reset.
Cyclical telegrams to this object with an identical telegram polarity (ON -> ON,
OFF -> OFF) produce no reaction.
1: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 26 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
Function: Short-circuit / overload signal
Object
h9
Function
Reset short-circuit / overload
Name
Valve outputs -
Input
Type
1-bit
DPT
1,015
Flag
C, W, -, (R)
1
Description 1-bit input object for central reset of all short-circuit/overload signals of the
valve outputs. In this case, the telegram polarity is fixed: "0" = No reaction, "1"
= Reset all signals.
Individual short-circuit / overload signals can only be reset via the object when
the testing cycle (waiting time and testing cycle time) of the affected valve
outputs has been completed.
Function: Collective feedback status
Object
h10
Function
Collective feedback status
Name
Valve outputs -
Output
Type
4 byte
DPT
27,001
Flag
C, -, (T),
(R)2
Description 4-byte output object for collective status feedback of all valve outputs. The
collective feedback summarises the valve states in just one telegram. The
object contains bit-orientated feedback information. The object can be actively
transmitting or passively read out (parameter-dependent).
Function: Activate / deactivate service mode
Object
h12
Function
Activate / deactivate
Name
Service mode -
input
Type
2-bit
DPT
2,001
Flag
C, W, -, (R)
1
Description 2-bit input object for activating and deactivating service mode. With the value
"1", bit 1 of the telegram activates service mode. The assigned valve outputs
are then locked in the status preset by bit 0 ("0" = Closed / "1" = Opened). The
configured valve direction of action is taken into account. The value "0" in bit 1
deactivates service mode again.
0x = Service mode deactivated
10 = Service mode activated, valves closed
11 = Service mode activated, valves opened
Function: Service mode status
Object
h13
Function
Status active / inactive
Name
Service mode -
output
Type
1-bit
DPT
1,002
Flag
C, -, T, R
Description 1-bit output object for status signalling of whether the service mode is active or
not. In this case, the telegram polarity is fixed: "0" = Service mode inactive,
"1" = Service mode active.
The object value is not transmitted automatically after a device reset (ETS
programming operation, bus/mains voltage return).
1: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
2: The communication flags are set automatically depending on the configuration. "T" flag for
active signalling object; "R" flat for passive status object.
Page 27 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
Function: Manual operation
Object
h14
Function
Disabling
Name
Manual operation -
input
Type
1-bit
DPT
1,003
Flag
C, W, -,
(R)1
Description 1-bit input object for disabling the buttons for manual operation on the device.
The polarity can be configured.
Function: Manual operation
Object
h15
Function
Status
Name
Manual operation -
output
Type
1-bit
DPT
1,002
Flag
C, -, T, R
Description 1-bit output object for manual operation status transmission. The object is "0",
when manual control is deactivated (bus control). The object is "1", when
manual operation is active. You can configure whether the temporary or the
permanent manual operation will be indicated as status information or not.
1: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 28 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
4.2.3.2 Objects for valve outputs
Function: Command value presetting
Object
h20,
70,
120,
170,
220,
270
Function
Command value
Name
Valve output X -
Input (X = 1...6)
Type
1-bit
DPT
1,001
Flag
C, W, -, (R)
1
Description 1-bit input object for the presetting of a switching command value, e.g. of a
KNX room temperature controller. In this case, the telegram polarity is fixed:
"0" = Close valve, "1" = Open valve. The configured valve direction of action is
taken into account in the electrical activation of the valve.
This object is only available for valve outputs configured in the ETS to the
command value data format "Switching (1-bit)".
Function: Command value presetting
Object
h21,
71,
121,
171,
221,
271
Function
Command value
Name
Valve output X -
Input (X = 1...6)
Type
1 byte
DPT
5,001
Flag
C, W, -, (R)
1
Description 1-byte input object for the presetting of a constant command value, e.g. of a
KNX room temperature controller (0...100 % -> 0...255). This object is only
available for valve outputs configured in the ETS to the command value data
formats "Constant (1-bit) with pulse width modulation (PWM)" or "Constant
(1-byte) with command value limiting value". With the command value format
"Constant (1-byte) with pulse width modulation (PWM)", the telegram value is
implemented by the actuator with an equivalent pulse-width-modulated switch
signal at the valve outputs. The duty factor is adapted constantly by the
actuator, depending on the command value received. The cycle time can be
configured in the ETS. In accordance with the configured valve direction of
action, the output is either energised or deenergised, depending on the valve
position to be approached. In so doing, the duty factor is inverted
automatically for a deenergised opened drive.
In the command value format "Constant (1-byte) with command value limiting
value", the received constant command value is converted into a switching
output signal, depending on a configured limiting value. The actuator opens
when the command value reaches the limiting value or exceeds it. A
hysteresis is also evaluated to prevent constant closing and opening of the
actuator for command values in the area of the limiting value. The actuator
only closes when the command value undershoots the limiting value minus the
configured hysteresis. The conversion of the constant input signal into a
switching command value takes place internally in the device. During
processing, the actuator evaluates the converted command value as if it were
a received 1-bit command value. It forwards the status directly to the
appropriate output, taking the configured valve direction of action into account.
1: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 29 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
Function: Valve status
Object
h22,
72,
122,
172,
222,
272
Function
Feedback valve command
value
Name
Valve output X -
Output (X = 1...6)
Type
1-bit
DPT
1,001
Flag
C, -, T, R1
Description 1-bit output object to feed back the active switching command value of a valve
output. In this case, the telegram polarity is fixed: "0" = Valve closed, "1" =
Valve opened.
This object is only available for valve outputs configured in the ETS to the
command value data formats "Switching (1-bit)" or "Constant (1-byte) with
command value limiting value".
It may also occur with such command value outputs that a constant command
value (PWM at the output) is active (e.g. after bus/mains voltage return or a
forced position and emergency operation or manual operation). In this case,
the status object feeds back a "0" if the command value corresponds to "0 %".
The object sends back a "1" when the set command value corresponds to
"1...100 %".
The object transmits the current status after bus voltage return and an ETS
programming operation, possibly after a transmission delay (configurable) has
elapsed.
Function: Valve status
Object
h23,
73,
123,
173,
223,
273
Function
Feedback valve command
value
Name
Valve output X -
Output (X = 1...6)
Type
1 byte
DPT
5,001
Flag
C, -, T, R1
Description 1-byte output object to feed back the active constant command value of a
valve output (0...100 % -> 0...255).
This object is only available for valve outputs configured in the ETS to the
command value data format "Constant (1-byte) with pulse width modulation
(PWM)".
The object transmits the current status after bus voltage return and an ETS
programming operation, possibly after a transmission delay (configurable) has
elapsed.
Function: Valve forced position
Object
h24,
74,
124,
174,
224,
274
Function
Forced position
Name
Valve output X -
Input (X = 1...6)
Type
1-bit
DPT
1,003
Flag
C, W, -, (R)
2
Description 1-bit input object for activating and deactivating of a forced position. The
telegram polarity can be configured.
Updates of the object from "Forced position active" to "Forced position active"
or from "Forced position inactive" to "Forced position inactive" produce no
reaction. The status preset via the forced position object is stored internally in
the device after a bus voltage failure and and is restored automatically after a
bus and/or mains voltage return.
1: The communication flags are set automatically depending on the configuration. "T" flag for
active signalling object; "R" flat for passive status object.
2: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 30 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
Function: Command value monitoring
Object
h25,
75,
125,
175,
225,
275
Function
Command value fault
Name
Valve output X -
Output (X = 1...6)
Type
1-bit
DPT
1,005
Flag
C, -, T, R
Description 1-bit output object to signal a faulty command value (with active command
value monitoring, no command value telegram was received within the
monitoring time). The telegram polarity can be configured.
Immediately after the bus voltage return or an ETS programming operation,
the object "Command value fault" does not transmit the status automatically. A
faulty command value must be detected again (expiry of the monitoring time
without a command value telegram) for the object value to be transmitted. This
is also the case if a saved emergency operation was restored after a device
reset.
Function: Command value limit
Object
h26,
76,
126,
176,
226,
276
Function
Command value limit
Name
Valve output X -
Input (X = 1...6)
Type
1-bit
DPT
1,002
Flag
C, W, -,
(R)1
Description 1-bit input object for requirement-orientated activating and deactivating of a
command value limit. The telegram polarity is fixed:
"0" = Command value limit inactive, "1" = Command value limit active.
Updates of the object from "1" to "1" or "0" to "0" do not produce a reaction.
If required, this object is only available for valve outputs configured in the ETS
to the command value data format "Constant (1-byte) with pulse width
modulation (PWM)".
It is possible to have the actuator activate the command value limit
automatically after bus voltage return or an ETS programming operation. The
status of the command value limit is not then automatically tracked in the
communication object.
Function: Valve rinsing
Object
h27,
77,
127,
177,
227,
277
Function
Valve rinsing start
Valve rinsing start / stop
Name
Valve output X -
Input (X = 1...6)
Type
1-bit
DPT
1,003
Flag
C, W, -,
(R)1
Description 1-bit input object for starting and stopping valve rinsing. Valve rinsing can be
activated by time or an event using this object. It is also possible, for example,
to cascade multiple heating actuators, so that they perform valve rinsing
simultaneously (link of the individual status objects to the input objects of the
valve rinsing).
The telegram polarity can be configured. Stopping can be prevented via the
object as an option.
The time of cyclical valve rinsing is restarted as soon as an externally started
valve rinsing operation is stopped by a Stop telegram or by the expiry of the
rinsing time. Updates of the object from "Start" to "Start" or "Stop" to "Stop" do
not produce a reaction. The length of an elapsing valve rinsing operation or
the cycle time of the cyclical valve rinsing are not restarted by this.
1: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 31 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
Function: Valve rinsing
Object
h28,
78,
128,
178,
228,
278
Function
Valve rinsing status
Name
Valve output X -
Output (X = 1...6)
Type
1-bit
DPT
1,002
Flag
C, -, T, R
Description 1-bit output object for status feedback of a valve rinsing operation. The
telegram polarity is fixed: "0" = Valve rinsing inactive,
"1" = Valve rinsing active.
The object transmits the current status after bus and mains voltage return and
after an ETS programming operation without a delay.
Function: Overload / short-circuit identification
Object
h29,
79,
129,
179,
229,
279
Function
Signal short-circuit /overload
Name
Valve output X -
Output (X = 1...6)
Type
1-bit
DPT
1,005
Flag
C, -, T, R
Description 1-bit output object to signal an identified overload or a short-circuit at the
affected valve output. The telegram polarity can be configured.
The object always transmits the current status after bus voltage return and an
ETS programming operation after a delay, providing that a delay after bus
voltage return has been configured on the "General" parameter page.
Function: Combined valve status
Object
h30,
80,
130,
180,
230,
280
Function
Feedback combined valve
status
Name
Valve output X -
Output (X = 1...6)
Type
1 byte
DPT
---1
Flag
C, -, T, R 2
Description 1-byte output object for combined feedback of various items of status
information of a valve output. The bit coding is preset as follows:
Bit 0: Command value status ("0" = OFF, 0 % / "1" = ON, "1...100 %")
Bit 1: Short-circuit ("0" = No short-circuit / "1" = Short-circuit)
Bit 2: Overload ("0" = No overload / "1" = Overload)
Bit 3: Valve rinsing ("0" = No valve rinsing / "1" = Valve rinsing active)
Bit 4: Service mode ("0" = No service mode / "1" = Service mode active)
Bit 5: Manual operation ("0" = No manual op. / "1" Manual op. active)
Bit 6: Forced position ("0" = No forced position / "1" = Forced position active)
Bit 7: Not assigned (always "0")
The object transmits the current status after bus voltage return and an ETS
programming operation, possibly after a transmission delay (configurable) has
elapsed.
1: Non-standardised DP type.
2: The communication flags are set automatically depending on the configuration. "T" flag for
active signalling object; "R" flat for passive status object.
Page 32 of 134
Software "Switch PWM 2068 / 1.0"
Object table
Art. No. MTN6730-0001
Function: Operating hours counter
Object
h31,
81,
131,
181,
231,
281
Function
Limit value / starting value
operating hours counter 1
Name
Valve output X -
Input (X = 1...6)
Type
2 byte
DPT
7,007
Flag
C, W, -, (R)
2
Description 2-byte input object for external presetting of a limiting value / starting value of
the operating hours counter of a valve output.
Value range: 0...65535
Function: Operating hours counter
Object
h32,
82,
132,
182,
232,
282
Function
Reset operating hours
counter
Name
Valve output X -
Input (X = 1...6)
Type
1-bit
DPT
1,015
Flag
C, W, -, (R)
2
Description 1-bit input object for resetting the operating hours counter of a valve output
("1" = Restart, "0" = No reaction).
Function: Operating hours counter
Object
h33,
83,
133,
183,
233,
283
Function
Value operating hours
counter
Name
Valve output X -
Output (X = 1...6)
Type
2 byte
DPT
7,007
Flag
C, -, T, (R)
2
Description 2-byte output object to transmit or read out the current counter level of the
operating hours counter of a valve output.
If the bus voltage should fail, the value of the communication object is not lost
and is actively transmitted to the bus after bus voltage return or an ETS
programming operation. In the as-delivered state, the value is "0".
Function: Operating hours counter
Object
h34,
84,
134,
184,
234,
284
Function
Op. hours counter elapsed
Name
Valve output X -
Output (X = 1...6)
Type
1-bit
DPT
1,002
Flag
C, -, T, (R)
2
Description 1-bit output object to signal that the operating hours counter has elapsed
(forwards counter = limiting value reached / backwards counter = value "0"
reached). With a message, the object value is actively transmitted to the bus
("1" = message active / "0" = message inactive).
If there is a device reset, the value of the communication object is not lost and
is actively transmitted to the bus after bus voltage return or an ETS
programming operation.
1: Threshold value object or start value object depending on the configured counter type of the
operating hours counter.
2: For reading, the R-flag must be set. The last value written to the object via the bus will be
read.
Page 33 of 134
Software "Switch PWM 2068 / 1.0"
Object table

Art. No. MTN6730-0001
4.2.4 Functional description
4.2.4.1 Description of channel-independent functions
4.2.4.1.1 Parameter configuration
To simplify the configuration, all the valve outputs can be assigned to the same parameters in
the ETS and thus configured identically. The parameter "Setting of the output parameters" on
the parameter page "General" specifies whether every valve output of the device can be
configured individually or whether all the outputs should be configured by the same parameters.
In the "All outputs equal" setting, the number of parameters in the ETS is reduced. The visible
parameters are then used on all the valve outputs automatically. Only the communication
objects can then be configured separately for the outputs. This setting should be selected, for
example, if all the actuators behave identically and should only be activated by different group
addresses (e.g. in office blocks or in hotel rooms).
In the parameter setting "Each output individually", each valve output possesses its own
parameter pages in the ETS.
Page 34 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.1.2 Priorities
The heating actuator distinguishes between various functions and events, which either affect all
of some of the assigned valve drives globally, or only specifically affect individual outputs.
Because these functions and events cannot be executed simultaneously, there must be priority
control. Each global or output-orientated function and each incoming event possesses a priority.
The function or the event with the higher priority overrides the lower-priority functions and
events.
The following priorities are defined...
- Overload / short-circuit (highest priority)
- Manual operation
- Behaviour after ETS programming
- Behaviour in case of mains or bus voltage return / bus voltage failure
- Service mode
- Valve rinsing
- Forced position
- Command value limit
- Emergency operation (through cyclical monitoring of the command value)
- Normal operation (activation using command value telegrams)
iThe behaviour after an ETS programming operation is only executed if there have been
changes in the configuration of the device. If just an application download is executed with
a project design already located in the actuator, then the actuator will executed the
behaviour after bus voltage return.
In manual operation and in service mode, a parameter separately defines the behaviour of each
of the valve outputs at the end of these functions. The heating actuator only then executes the
configured behaviour if, at the time of enabling, no function with a lower priority is active. Should
a lower-level function be active (e.g. forced position), then the actuator will execute the
behaviour of this function again.
Page 35 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
Art. No. MTN6730-0001
iSpecial case: A function with a higher priority (e.g. manual operation) is active. Before this,
a function with a lower priority (e.g. service mode) was active. This function is deactivated
whilst the higher-level function remains active. At the end of the higher-priority function, the
state of the outputs should be tracked. The actuator then evaluates the command value of
the lower-level function and checks how the behaviour is preset or configured here. The
actuator then executes the command value presetting of the lower-level function. If tracking
is also preset or configured for this function, the actuator will still go one layer lower and
evaluate the behaviour configured there.
Example 1: Service mode is active (valve completely opened / 100 % command value). A
value of 10 % was most recently preset via a command value telegram (normal operation).
No other functions are active. Service mode is configured in such a way that the starting
state should be tracked at the end of this function.
Permanent manual operation is now activated. The actuator assumes the command value
of manual operation (e.g. 50 %). Whilst manual operation is active, service mode is
deactivated via the KNX. The actuator remains in manual operation until this is exited via
the button field. As no more lower-level functions are active, the heating actuator evaluates
the parameter "Behaviour at the end of permanent manual operation during bus operation".
As this parameter is set to "Track outputs", the actuator now evaluates the command value
to be tracked. For this, it checks how the behaviour at the end of service mode is preset.
Here too, the state should be tracked. Thus, the actuator evaluates the other lower-level
functions. As no other functions were and are activated, the actuator sets the last
command value presetting at the valve output using the KNX telegram (here 10 %).
Example 2: Service mode is active (valve completely opened / 100 % command value). A
value of 10 % was most recently preset via a command value telegram (normal operation).
No other functions are active. Service mode is configured in such a way that no change
should be executed at the end of this function.
Permanent manual operation is now activated. The actuator assumes the command value
of manual operation (e.g. 50 %). Whilst manual operation is active, service mode is
deactivated via the KNX. The actuator remains in manual operation until this is exited via
the button field. As no more lower-level functions are active, the heating actuator evaluates
the parameter "Behaviour at the end of permanent manual operation during bus operation".
As this parameter is set to "Track outputs", the actuator now evaluates the command value
to be tracked. For this, it checks how the behaviour at the end of service mode is preset.
There, the configuration states that there should be no change. Thus, the heating actuator
for the affected valve output assumes the command value of service mode (here 100 %)
and sets this at the output. In this case, the actuator no longer evaluates other lower-level
functions.
Page 36 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.1.3 Manual operation
All the valve outputs of the device have electronic manual operation. The button field with 4
function keys and 3 status LEDs on the front panel of the device can be used for setting the
following modes of operation...
- Bus operation: Operation via room temperature controllers, push-buttons, or other bus
devices,
- Temporary manual operation : Manual operation locally with keypad, automatic return to
bus operation,
- Permanent manual operation: Exclusively manual operation on the device (e.g.
construction site mode, commissioning phase).
The operation of the function keys, the activation of the valve outputs and the status display are
described in detail in chapter "Operation". The configuration, status feedback, disabling via bus
operation, and interaction with other functions of the device when manual operation is activated
and deactivated are described in greater detail below.
Manual control is possible while the device is supplied with power from the mains or bus. In the
state as supplied the manual control mode is fully enabled. In this unprogrammed state, all the
outputs can be controlled by manual operation, so that fast function checking of the connected
valve drives (e.g. on the construction site) is possible.
After initial commissioning of the actuator via the ETS, manual control can be enabled or
disabled separately for various states of operation. Manual control can, for instance, be disabled
during bus operation (bus voltage applied). Another option consists in the complete disabling of
the manual control only in case of bus voltage failure. Therefore manual control can be disabled
completely, if the bus disable and bus failure disable are active.
Enabling the manual control mode
Manual control for the different states of operation is enabled or disabled by means of the
parameters "Manual control in case of bus voltage failure" and "Manual control during bus
operation".
oSet the parameter "Manual control in case of bus voltage failure" to "enabled".
Manual control is then basically enabled when the bus voltage is off. This setting
corresponds to the setting of the actuator as delivered.
oSet the parameter "Manual control in case of bus voltage failure" to "disabled".
Manual control is completely disabled when the bus voltage is off. In this case, bus
operation is not possible either so that the outputs of the actuator can no longer be
activated.
oSet the parameter "Manual control during bus operation" to "enabled".
Manual control is then basically enabled when the bus voltage is on. The outputs of the
actuator can be activated via the bus or manually. This setting corresponds to the setting of
the actuator as delivered.
oSet the parameter "Manual control during bus operation" to "disabled".
Manual control is completely disabled when the bus voltage is on. In this configuration, the
actuator outputs can only be operated via the bus.
Presetting a manual control disable
The manual control mode can be separately disabled via the bus, even if it is already active. If
the disabling function is enabled, then as soon as a disabling telegram is received via the
disabling object of the manual control, the actuator immediately terminates an activated manual
control and locks the function keys on the front panel of the device. The telegram polarity of the
disabling object is parameterisable.
Page 37 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
The manual control mode during bus operation must be enabled.
oSet the parameter "Disabling function ?" on parameter page "Manual control" to "yes".
The disabling function of the manual control mode is enabled and the disabling object is
visible.
oSelect the desired telegram polarity in the "Disabling object polarity" parameter.
iIf the polarity is "0 = disabled; 1 = enabled", the disabling function is immediately active on
return of bus/mains voltage or after an ETS programming operation (object value "0"). To
activate the manual control in this case, an enable telegram "1" must first be sent to the
disabling object.
iIn case of bus voltage failure, disabling via the disabling object is always inactive
(depending on parameterization, the manual control is then either enabled or completely
disabled). After bus and mains voltage return, a disabled state that was active beforehand
is always inactive when the polarity of the disabling object is non-inverted. If only the bus
voltage has failed and been switched on again (mains voltage is available without
interruption), then an activated disable remains intact.
i When an active manual control is terminated by a disable, the actuator will also transmit a
"Manual control inactive" status telegram to the bus, if the status messaging function is
enabled.
Presetting the status message function for the manual control mode
An actuator can transmit a status telegram to the bus via a separate object when the manual
operation is activated or deactivated. The status telegram can only be transmitted when the bus
voltage is switched on. The polarity of the status telegram can be parameterised.
The manual control mode during bus operation must be enabled.
oSet the parameter "Transmit status ?" on parameter page "Manual control" to "yes".
The status messaging function of manual control is enabled and the status object is visible.
oSpecify in the parameter "Status object function and polarity" whether the status telegram is
generally a "1" telegram whenever the manual control mode is activated or only in those
cases where the permanent manual mode is activated.
iThe status object is always "0" when the manual control mode is deactivated.
iThe status is not transmitted automatically after bus/mains voltage return.
iWhen active manual control is terminated by a disable, the actuator will also transmit a
"Manual control inactive" status telegram to the bus.
Presetting the behaviour at the beginning and at the end of manual control
The manual control distinguishes the temporary and permanent manual control. The behaviour
is different depending on these modes of operation, especially at the end of manual control. It
should always be noted that bus operation is always disabled while manual operation is active,
as manual operation has a higher priority (see page 35-36).
Behaviour at the beginning of manual control:
The behaviour at the beginning of manual operation differs for temporary and permanent
manual operation. On activation of short-time manual operation, the most recently set states of
the outputs initially remain active. For opened valve outputs, the pulse width modulation is not
adjusted to the preset value of manual operation. This only takes place when the valves are first
closed and then reopened, in the course of brief manual operation. Even after permanent
manual operation is switched on, the states of the outputs last set initially remain active.
However, for opened valve outputs, the pulse width modulation is automatically adjusted to the
preset value of manual operation.
Behaviour at the end of manual control:
The behaviour at the end of manual control is different for temporary and permanent manual
Page 38 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
control.
The temporary manual mode is shut off automatically when the last output has been addressed
and when the select key c is pressed once more. The state of all outputs set via manual
control is not changed when temporary manual control is switched off. If, however, a function
with a priority higher than that of normal operation (e.g. forced position, safety operation) was
activated for the valve outputs via the bus before or during manual operation, the actuator
executes the function with the higher priority for the outputs concerned.
The permanent manual control mode is shut off, when the select key c is pressed for more
than 5 seconds. Depending on the configuration of the actuator in the ETS, the outputs will be
set to the state last adjusted in the manual operation or to the state internally tracked (e.g.
forced position, service operation) when permanent manual operation is switched off. The
parameter "Behaviour at the end of permanent manual control during bus operation" defines the
corresponding reaction.
oSet the parameter "Behaviour at the end of permanent manual control during bus
operation" to "no change".
After the end of the permanent manual operation, the current state of all valve outputs
remains unchanged. If, however, a function with a priority lower than that of manual
operation (e.g. forced position, service mode) has been activated via the bus before or
during manual operation, the actuator sets the reaction preset for this function for the
appropriate outputs.
oSet the parameter "Behaviour at the end of permanent manual control during bus
operation" to "track outputs".
During active permanent manual operation, all incoming telegrams and state changes are
tracked internally. At the end of the manual operation, the valve outputs are set according
to the most recently received command or the most recently activated function with a lower
priority.
iThe behaviour at the end of the permanent manual control when the bus voltage is off (e.g.
building site operation) is permanently set to "no change".
iThe control operations triggered in the manual control mode will be transmitted via
feedback objects to the bus, if enabled and actively transmitting.
iDuring an ETS programming operation, an activated manual operation mode will always be
terminated. In this case, the parameterized or predefined behaviour at the end of manual
control will not be executed. The actuator executes the configured behaviour after ETS
programming instead.
Setting the behaviour of manual operation to bus voltage return
An active short-time or permanent manual operation can be terminated as option, should the
bus voltage fail, or not. The following always applies: If the mains voltage supply is not switched
on, manual operation is possible is bus voltage is available (valve output can only be activated if
a valve power supply is available). If, in this case, the bus voltage is switched off, the actuator
also always exits manual operation, as there is no power supply to the device electronics. After
the bus voltage return (mains power supply switched off), manual operation is always
deactivated.
oSet the "Behaviour of manual operation on bus voltage return" parameter to "Exit manual
operation".
After the bus voltage return through a mains power supply being available, active manual
operation is exited. For example, this means that it is possible to deactivate manual
operation through a simultaneous bus reset on multiple actuators with the same parameter
setting.
oSet the "Behaviour of manual operation on bus voltage return" parameter to "Do not exit
manual operation".
Page 39 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
After the bus voltage return through a mains power supply being available, active manual
operation is never exited.
Setting disabling of the bus control
Individual valve outputs can be disabled locally during permanent manual operation, so that the
disabled outputs can no longer be activated using input command value telegrams or lower-
priority device functions. Such disabling of the bus operation is initiated by local operation in
permanent manual operation and is indicated by rapid flashing of the status LEDs on the front
panel of the device. The disabled outputs can then only be activated in permanent manual
control.
The manual control mode during bus operation must be enabled.
oSet the "Disable bus control of individual outputs during bus operation" parameter on
parameter page "Manual control" to "yes".
The function for disabling the bus control is enabled and can be activated locally.
oSet the "Disable bus control of individual outputs during bus operation" parameter on
parameter page "Manual operation" to "No".
The function for disabling the bus control is deactivated.
iA locally instigated disable overrides all the other functions of the actuator that can be
activated via the bus (e.g. service mode or forced position). Depending on the configuration
of the actuator in the ETS, the outputs will be set to the state most recently set or internally
tracked after the disabling and subsequent deactivation of permanent manual operation.
iAny disabling of the bus control activated locally is not reset after bus voltage return if the
mains voltage was switched on interruption free. A failure of the bus and mains voltage or
ETS programming operation always deactivates the disabling of the bus control.
Setting the cycle time and PWM of manual operation
During manual operation, all the valve outputs are activated with a pulse width modulation
(PWM) using the OPEN button, irrespective of the configured command value data format (1-bit
or 1-byte). Taking the cycle time set in the device into account. the average output signal
resulting from the statically configured pulse width modulation is a measure of the centred valve
position of the control valve and thus a reference for the set room temperature for manual
operation. The cycle time of the PWM signal can, like PWM itself, be configured centrally on the
parameter page "Manual operation" in the ETS. In consequence, a manual operation locally on
the device can allow the use of a different cycle time than in normal operation of the actuator
(activation via KNX telegrams).
The CLOSE command always closes the valves completely (0 %). In the central operating
function of all valve outputs with the ALL OP / CL button, the actuator always activates the
valve outputs with a constant signal (0 % or 100 %).
oConfigure the parameters "Cycle time for manual operation" and "PWM for manual
operation (5...100 %)" on the "Manual operation" parameter page to the required values.
For opened valve outputs, the actuator sets the set pulse width modulation (PWM) with the
preset cycle time. With short-time manual operation, this only takes place when the OPEN
button has been pressed. In permanent manual operation, the actuator sets the PWM
immediately after the activation of manual operation for opened valve outputs.
In manual operation, the configured valve direction of action (deenergised closed /
deenergised opened) is taken into account during valve activation. With deenergised
closed valves, the switch-on time is derived directly from the configured PWM and the cycle
time.
Example: PWM = 30 %, cycle time = 10 minutes -> Switch-on time = 3 minutes, switch-off
time = 7 minutes.
In the case of deenergised opened valves, the switch-on time is inverted. Example: PWM =
30 %, cycle time = 10 minutes -> Switch-on time = 7 minutes, switch-off time = 3 minutes.
Page 40 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iIn the as-delivered state, the actuator works with a PWM of 50 % and a cycle time of 20
minutes.
Page 41 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
Art. No. MTN6730-0001
4.2.4.1.4 Service mode
Service mode allows the bus-controlled locking of all or some valve outputs for maintenance or
installation purposes. If service mode is active, actuators can be moved to a defined position
(completely open or closed) and locked against activation by command value telegrams. Both
service mode and the locking state are preset by a 2-bit forced operation telegram, according to
KNX DPT 2.001.
The first bit (bit 0) of the object "Service mode - Activate / deactivate input" directly specifies the
locking state. The second bit (bit 1) of the object activates or deactivates service mode. The
locking state in the telegram is only evaluated by the actuator, when bit 1 plans for active
service mode. Otherwise, bit 0 is ignored.
iThe valves activated by service mode open or close completely and statically. No pulse
width modulation is executed. The configured valve direction of action is taken into account
in the electrical activation of the outputs.
Bit 1 Bit 0 Function
0 x Service mode not active -> normal control according to priority rule
0 x Service mode not active -> normal control according to priority rule
1 0 Service mode active: Close valves
1 1 Service mode active: Open valves
Bit coding of service mode
Service mode influences the status signals of the affected valve outputs. Depending on the
configured command value data format, the following command values are assumed when
service mode is active...
- Switching (1 bit):
Valve closed = OFF
Valve opened = ON
- Constant (1-byte) with pulse width modulation (PWM):
Valve closed = 0 %
Valve opened = 100 %
- Constant (1-byte) with command value limiting value:
Valve closed = OFF
Valve opened = ON
iThe command value preset by an active service mode is also included in the determination
of heat requirements and the largest command value. In addition, service mode has an
influence on pump control.
The behaviour of the assigned valve outputs at the end of service mode can be configured. In
addition, a 1-bit status object can signal when service mode is active or not.
iUpdates of the object from "Service mode active" to "Service mode active" while
maintaining the forced valve status or from "Service mode inactive" to "Service mode
inactive" produce no change in the behaviour of the value outputs. However, the status
telegram of the service mode is retransmitted on each update.
iValve outputs locked by service mode can still be activated in manual operation. At the end
of a manual operation, the actuator executes the service reaction for the appropriate valve
outputs once again if service mode is still activated at this time.
Enabling service mode
Service mode must first be enabled on the "General" parameter page, so that it can be activated
and deactivated via the KNX during actuator operation.
oSet the parameter "Use service mode ?" to "yes".
Page 42 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
Service mode is enabled. The communication object "Service mode - Deactivate / activate
input" becomes visible. Valve outputs can be assigned on the parameter pages "Ax -
assignments".
oSet the parameter "Use service mode ?" to "no".
Service mode is not available. No valve outputs can be assigned to service mode in the
ETS.
Assign outputs to service mode
For a valve output to be influenced by service mode, an assignment must take place. On the
parameter pages "Ax - Assignments", it is possible to define the assignment to service mode
separately for each valve output.
oSet the parameter "Assignment to service mode ?" to "yes".
The appropriate valve output is assigned to service mode. It is locked according to the
object value when service mode is active.
oSet the parameter "Assignment to service mode ?" to "no".
The valve output is not assigned to service mode. Activation and deactivation of the service
function does not influence the output.
iAssignments can only be made on the parameter pages "Ax - Assignments" if service
mode is enabled on the "General" parameter page.
Defining the behaviour at the end of service mode
When service mode is deactivated, the assigned valve outputs are enabled again. Activation of
these outputs using command value telegrams or other functions with a lower priority is then
possible. The parameter "Behaviour at the end of service mode" specifies the state to which the
affected valve outputs go after enabling.
iAt the end of service mode, the actuator only then executes the configured behaviour if, at
the time of enabling, no function with a lower priority is active. Should such a function be
active (e.g. forced position), then the actuator will execute it.
oSet the parameter to "No change".
In this setting, assigned valve outputs show no reaction at the end of service mode. They
remain in the most recently set state, until a new command value presetting is
implemented.
oSet the parameter to "Close all outputs completely".
In this setting, all the assigned valve outputs close completely. Here too, the actuators
remain in this state until a new command value presetting is implemented.
oSet the parameter to "Open all outputs completely".
In this setting, all the assigned valve outputs open completely. The actuators remain in this
state until a new command value presetting is implemented.
oSet the parameter to "Track states".
In this configuration, the valve state received during the service function or preset by the
function is tracked at the end of service mode.
Configuring the status function of service mode
An active service mode can optionally be displayed by a 1-bit status object. A telegram with the
value "1" displays an active service mode. A telegram with the value "0" displays a deactivated
service function.
Page 43 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
Art. No. MTN6730-0001
As soon as service mode is enabled in the ETS, the status communication object is also
available.
iUpdates of the 2-bit input object from "Service mode active" to "Service mode active" or
from "Service mode inactive" to "Service mode inactive" always causes retransmission of
the status telegram.
iThe object value of the status function is not transmitted automatically to the bus after a
device reset (ETS programming operation, bus/mains voltage return).
Page 44 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
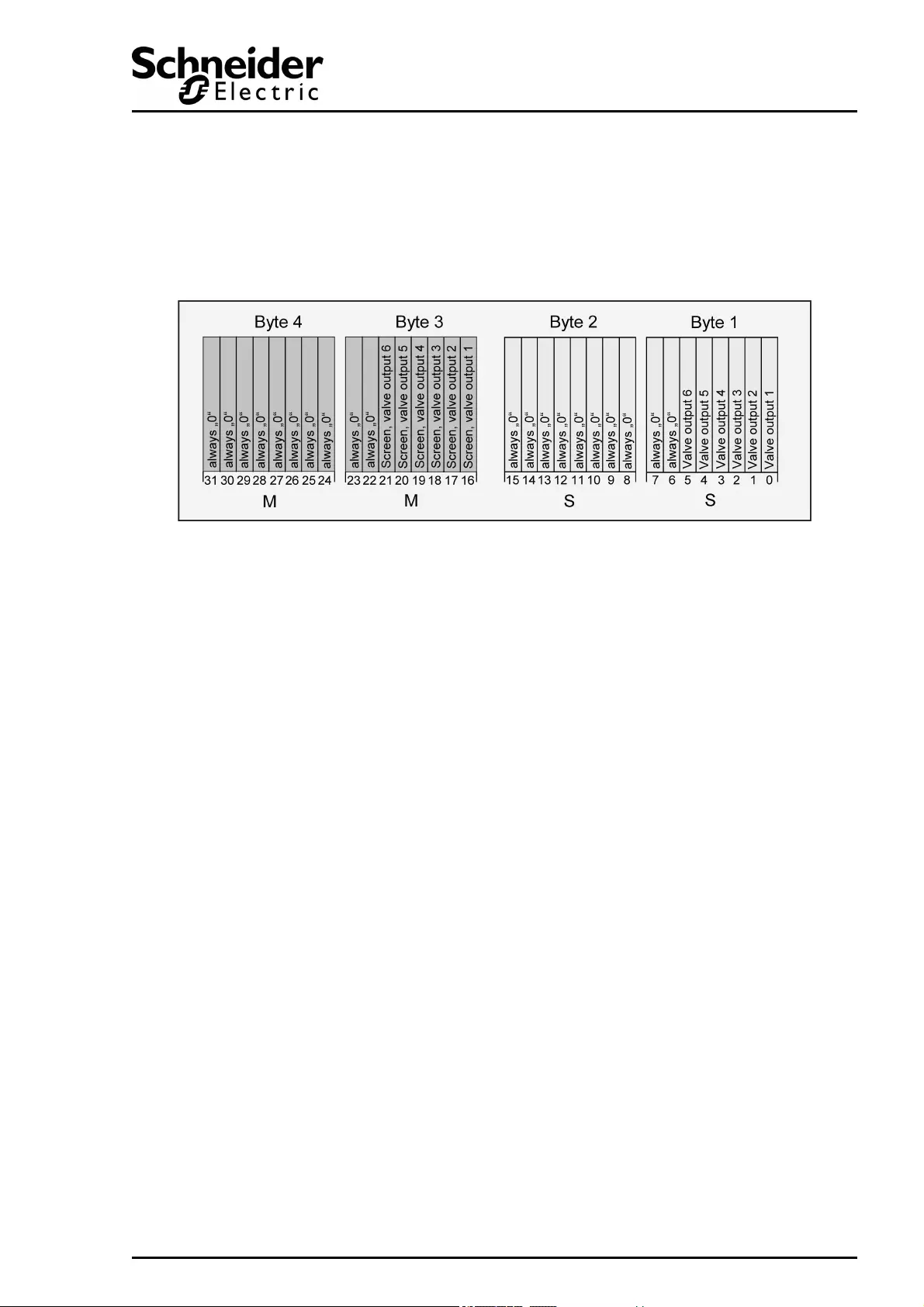
Art. No. MTN6730-0001
4.2.4.1.5 Collective feedback
After central commands or after bus/mains voltage return, a KNX line is generally heavily loaded
by data traffic as many bus devices are transmitting the state of their communication objects by
means of feedback telegrams. This effect occurs particularly when using visualisations.
Collective feedback can be used to keep the telegram load low during initialisation.
The collective feedback summarises the states of all valve outputs in bit-orientated form
(Figure 5).
Figure 5: Object structure of the collective feedback
The 4-byte object of the collective feedback contains the status information of all 6 valve
outputs. Each valve output has one bit representing the state ("S" bit) and another one defining
the masking ("M" bit). The "S" bits correspond to the logical valve states and are either "1"
(Valve opened) or "0" (Valve closed). Through the state "1", the "M" bits show that the output
exists and, therefore, the corresponding "S" bit can be evaluated. The "0" state in an "M" bit
shows that the actuator does not possess this output number. In this case, the corresponding
"S" bits are constantly "0", as there is no valve state.
The following heating actuator possesses 6 outputs. As a result, the following example object
values result...
"00 3F 00 xx", x = switching states
-> Only valve outputs 1 and 2 opened: "00 3F 00 03"
-> Only valve outputs 1 and 3 opened: "00 3F 00 05"
-> All valve outputs opened: "00 3F 00 3F"
The status of the "S" bits in the collective feedback is dependent on the active command value
of a valve output. Constant command values are converted into a 1-bit status:
0 % -> "0" / "1...100 %" -> "1"
The valve direction of action configured for each output in the ETS is also evaluated in the
electrical activation of the actuators.
Page 45 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
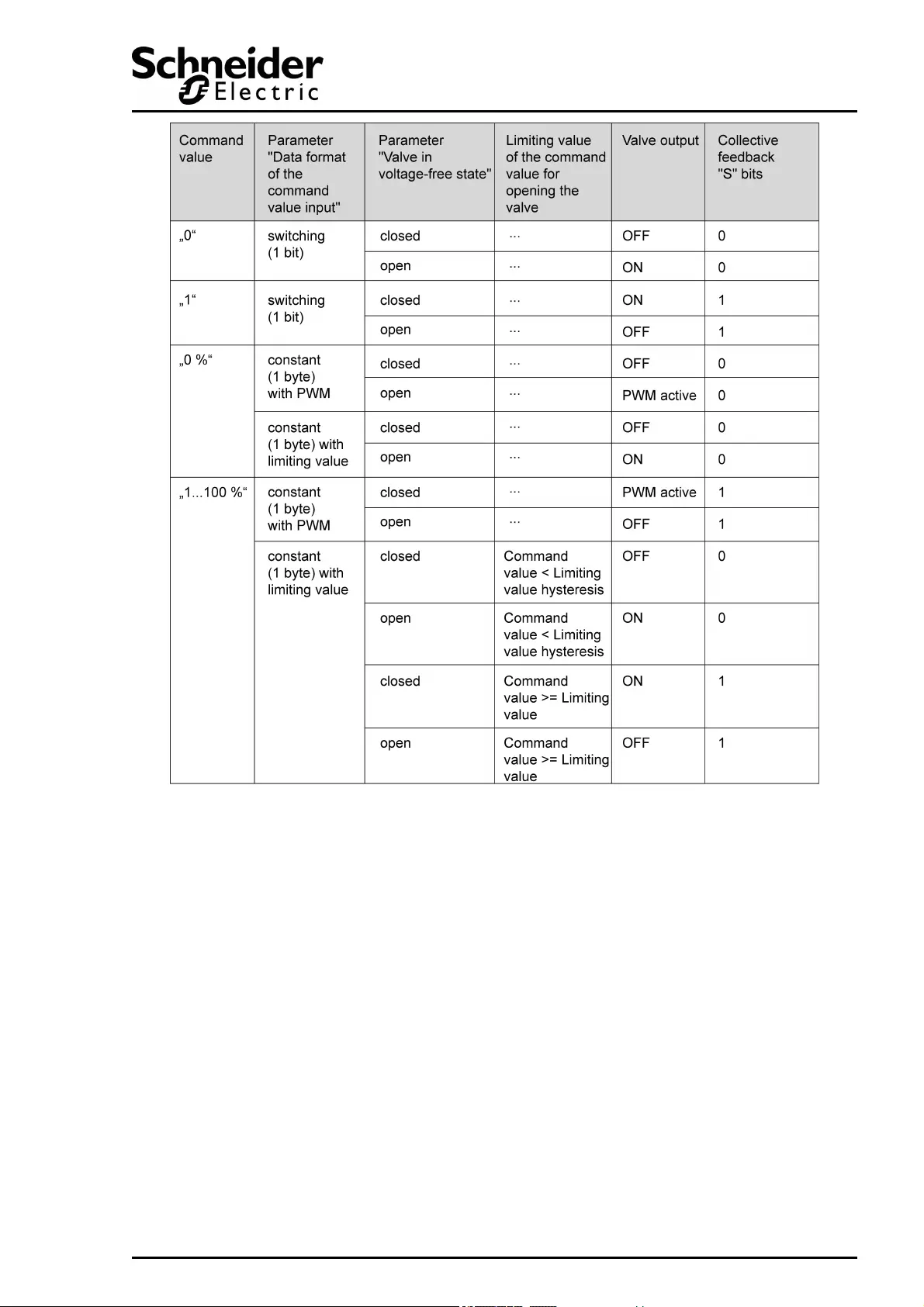
Art. No. MTN6730-0001
Figure 6: Status in the collective feedback, dependent on the command value and configuration
of the valve outputs
Use of the collective feedback would be possible in appropriate visualisation applications - for
example, in public buildings such as schools or hospitals - where the valve states of the
actuators are displayed centrally and there is no separate state display at the control sections.
In such applications, the collective feedback can replace the status individual feedback and
thereby reduce the bus load.
Activate collective feedback
Collective feedback is a global device function and can be enabled in the parameter node
"Valve / Pump".
oSet the parameter "Collect. feedbk status of value outputs (opened / closed) ?" to "yes".
Collective feedback is enabled. The collective feedback object becomes visible in the ETS.
oSet the parameter to "no".
Page 46 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
Collective feedback is deactivated. No collective feedback object is available.
Collective feedback type
Collective feedback can be provided in the function of an active signalling object or a passive
status object. In the case of an active signal object, the feedback is automatically transmitted to
the bus whenever the status contained therein changes. In the function as a passive status
object, there is no automatic telegram transmission. In this case, the object value must be read
out. The ETS automatically sets the object communication flags required for proper functioning.
Collective feedback must be enabled.
oSet the parameter "Type of collective feedback" to "Active signalling object".
The actuator transmits the collective feedback automatically when the object value is
updated. After a device reset (ETS programming operation, bus and mains voltage return,
only bus voltage return), current collective feedback is always transmitted.
oSet the parameter to "Passive status object".
Collective feedback will only be transmitted in response if the object is read out from the
bus. No automatic telegram transmission of the collective feedback takes place after bus or
mains voltage return or after an ETS programming operation.
Setting collective feedback after bus/mains voltage return or after programming with the
ETS
If used as active signal object, the collective feedback is transmitted to the bus after bus and
mains voltage return, after just bus voltage return or after an ETS programming operation. In
these cases, the feedback can be time-delayed with the time delay being preset globally for all
device feedback together on the "General" parameter page.
Collective feedback must be enabled and the feedback type set to "Active message object".
oSet the parameter "Time delay for feedback after bus voltage return ?" to "yes".
The collective feedback telegram is transmitted with a delay after bus and mains voltage
return, after just bus voltage return or after programming in ETS. No feedback is
transmitted during a running time delay, even if a valve state changes.
oSet the parameter "Time delay for feedback after bus voltage return ?" to "no".
The collective feedback is transmitted immediately after bus / mains voltage return or after
an ETS programming operation.
Setting cyclic transmission of the collective feedback
The object of the collective feedback can also transmit its value cyclically in addition to
transmission when updating.
Collective feedback must be enabled and the feedback type set to "Active message object".
oSet the parameter "Cyclical transmission of feedback telegram?" to "yes".
Cyclical transmission is activated.
oSet the parameter "Cyclical transmission of the collective feedback ?" to "no".
Cyclical transmission is deactivated, which means that collective feedback is only
transmitted to the bus if one of the valve states changes.
iThe cycle time for all cyclic feedback telegrams is defined centrally on the parameter page
"General".
Page 47 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iDuring an active delay, no collective feedback telegram will be transmitted even if a valve
state changes.
Page 48 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.1.6 Summer / winter switch-over
The actuator possesses a summer / winter switch-over. Depending on the season, this allows
the setting of different command value setpoints for a valve output for emergency operation or
forced position. Summer or winter mode is directly preset by the 1-bit communication object
"Summer / winter switch-over". The telegram polarity can be configured in the ETS.
The "Summer" or "Winter" state preset via the object is stored internally in the device and is
restored after a device reset. In the ETS, it is possible to configure whether, after an ETS
programming operation, the saved value is restored or, alternatively, if a defined operation
(summer or winter) is activated.
It is also possible to switch the operating mode during active emergency operation (if called by
command value monitoring) or during an active forced position (if activated via the object). In
this case, the value belonging to the operating mode is activated immediately after the switch-
over. If the value for emergency operation or the forced position is polled on a bus/mains
voltage return or after an ETS programming operation, the command values do not change
when the operating mode is switched over.
Enable summer / winter switch-over
The summer / winter switch-over must first be enabled on the "General" parameter page, so that
it is possible to switch between summer and winter mode during actuator operation.
oSet the "Summer/winter mode switch-over ?" parameter to "yes". Configure the parameter
"Polarity of 'Summer / winter switch-over' object" to the required telegram polarity.
The summer / winter switch-over is enabled. The communication object "Summer / winter
switch-over" becomes visible in the ETS. Summer and winter command values can be
configured for emergency operation and a forced position for the valve outputs.
oSet the "Summer/winter mode switch-over ?" parameter to "no".
The summer / winter switch-over is not available. For the valve outputs, only one command
value can be configured separately for emergency operation or a forced position.
Define the behaviour after of the summer / winter switch-over during an ETS
programming operation
The "Summer" or "Winter" state preset via the object "Summer / winter switch-over" is stored
internally in the device and is restored after a device reset (bus or mains voltage return). The
parameter "Operating mode after ETS programming operation" on the parameter page
"General" also defines which operating mode is active after ETS commissioning.
oSet the parameter to "Summer mode".
In this setting, the actuator activates summer operation after an ETS programming
operation. This overwrites the value saved internally in the device.
oSet the parameter to "winter mode".
In this setting, the actuator activates winter mode after an ETS programming operation.
This overwrites the value saved internally in the device.
oSet the parameter to "No change (saved operating mode)".
In this configuration, the actuator activates the most recently saved operating mode.
iThe operating mode tracked after bus/mains return or preset after an ETS programming
operation is not tracked in the communication object by the actuator.
Page 49 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.1.7 Heat requirement and largest command value
Heat requirement control
The heating actuator possesses heat requirement control. Here, the actuator continuously
evaluates the command values of assigned outputs and makes general heat requirement
information available as a 1-bit control value in the form of limiting value monitoring with
hysteresis. Using a KNX switch actuator, this allows the energy-efficient activation of burner and
boiler controllers with suitable control inputs (e.g. requirement-orientated switch-over between
the reduction and comfort setpoint in a central combi boiler).
A heat requirement is only signalled by the actuator via the object of the same name when at
least one command variable of the assigned outputs exceeds a limiting value with hysteresis
defined in the ETS. A heat requirement signal is retracted when the limiting value is reached or
undershot again (Figure 7). The telegram polarity of the heat requirement information can be
configured.
iIn addition, valve outputs, which receive preset command values via the data format
"Switching (1-bit)" and "Switching (1-byte) with command value limiting value", influence
the heat requirement control. In the case of "Switching (1-bit)", an "OFF" command value is
interpreted as "0 %" and an "ON" command value as "100 %". In the case of "Switching
(1-byte) with command value limiting value", the actuator evaluates the converted switching
output signal in the same way ("OFF" is interpreted as "0 %", "ON" is interpreted as "100
%").
iWith some functions and events, valve outputs, which are configured to the command
value data formats "Switching (1-bit)" and "Switching (1-byte) with command value limiting
value", are always activated via a constant command value through pulse width modulation
(PWM), providing that command values not equal to 0 % or 100 % are to be set (after bus
voltage return, after an ETS programming operation, during manual operation, with an
active forced position and with active emergency operation). PWM keeps being executed
until the named functions have been exited or, after the named events, no more lower-level
functions are active and a new command value telegram is received via the bus, overriding
the constant command value on the valve output.
In this case, the constant command value set by the PWM is also included in the heat
requirement control.
iAfter bus voltage return and an ETS programming operation, the actuator always first
transmits the status "No heat requirement" without a delay. The actuator then updates the
status to "Heat requirement", providing that the condition for this has been fulfilled and an
optionally configured "Heat requirement ACTIVE" has elapsed.
iA valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influence the
heat requirement control.
Page 50 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
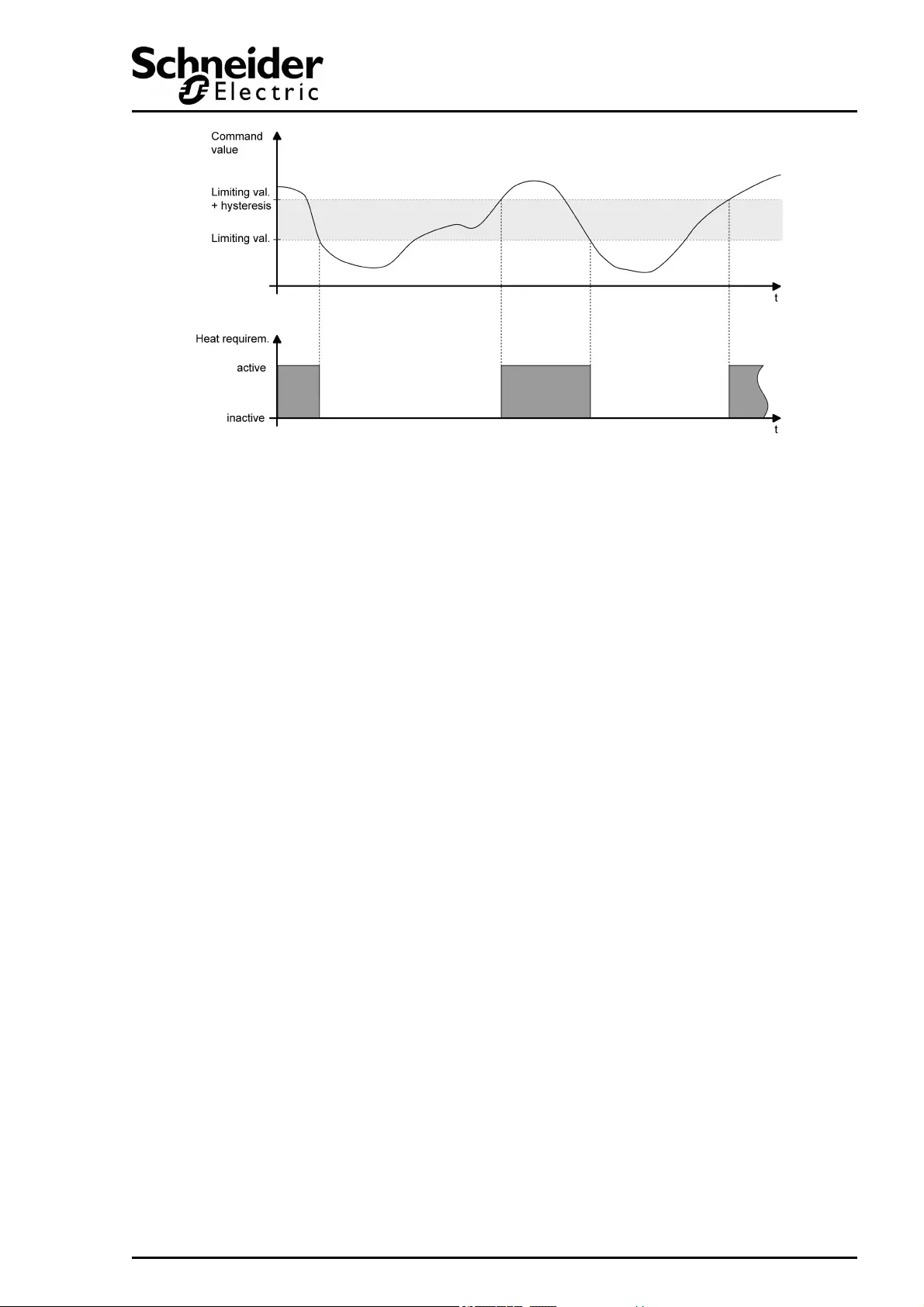
Art. No. MTN6730-0001
Figure 7: Heat requirement information with sample command value characteristic
Optionally, the actuator can evaluate an external telegram for heat requirement information (e.g.
from another heating actuator). This allows the cascading of multiple actuators with a heat
requirement signal. The local heating actuator links the 1-bit telegram value of "External heat
requirement" object with the internal state of its own heat requirement logically as OR and
outputs the result of this link via the object "Heat requirement". The telegram polarity of the
external object is fixed: "0" = Heat requirement INACTIVE, "1" = Heat requirement ACTIVE.
The actuator only outputs the telegram of an active heat requirement after determination when
the delay time defined by the parameter "Delay heat requirement INACTIVE" has elapsed. No
heat requirement request is transmitted if the actuator no longer determines a heat requirement
within the preset time.
The actuator only retracts heat requirement information after determination when the delay time
defined by the parameter "Delay heat requirement INACTIVE" has elapsed. The heat
requirement information is not retracted if the actuator no longer determines a new heat
requirement within the preset time.
Enabling and configuring the Heat requirement function
The Heat requirement function must first be enabled on the "Valves / Pump" parameter page, so
that it can be used during actuator operation.
oSet the parameter "Activate function 'Heat requirement' ?" to "yes". Configure the
parameter "Polarity of 'Summer Heat requirement' object" to the required telegram polarity.
In addition, define the limiting value and hysteresis.
Heat requirement control is activated. The heat requirement information becomes active
according to the set telegram polarity, if at least one command value of the assigned valve
outputs exceeds the configured limiting value plus hysteresis. The heat requirement
becomes inactive when the limiting value is reached or undershot again.
The valve outputs must be assigned to the heat requirement control individually on the
parameter pages "Ax - Assignments", so that they are included in the requirement
determination.
oSet the parameter "Activate function 'Heat requirement' ?" to "no".
Heat requirement control is not available.
Page 51 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
Enabling detection of an external heat requirement
Optionally, the actuator can evaluate an external telegram for heat requirement information (e.g.
from another heating actuator). This allows the cascading of multiple actuators with a heat
requirement signal.
The object must be enabled for an external heat requirement to be recorded.
oSet the parameter "Record external heat requirement ?" to "yes".
The "External heat requirement" object is enabled. The local heating actuator links the 1-bit
telegram value of this object with the internal state of its own heat requirement logically as
OR and outputs the result of this link via the object "Heat requirement".
oSet the parameter "Record external heat requirement ?" to "no".
Detection of an external heat requirement is not possible. The actuator only determines the
heat requirement information itself.
iCyclical telegrams to the object "External heat requirement" with an identical telegram
polarity (ON -> ON, OFF -> OFF) cause no reaction.
iAfter a device reset, there is no polling of the current status of the object "External heat
requirement". Only when a bus telegram is received does the actuator take this status into
account during evaluation of the heat requirement.
Configure delay for heat requirement control
If necessary, the activation and deactivation of the heat requirement information can be
delayed.
oSet the parameter "Delay heat requirement ACTIVE" to the desired time.
The actuator only outputs the telegram of an active heat requirement after determination
when the defined delay time has elapsed. No heat requirement request is transmitted if the
actuator no longer determines a heat requirement within the preset time.
oSet the parameter "Delay heat requirement INACTIVE" to the desired time.
The actuator only retracts heat requirement information after determination when the
defined delay time has elapsed. The heat requirement information is not retracted if the
actuator no longer determines a new heat requirement within the preset time.
Largest command value
Through evaluation and determination of the largest command value in the heating or cooling
system, the actuator allows influencing of the energy consumption of a housing or commercial
building. The information on the largest active 1-byte command value can be made available to
suitable calorific furnaces with integrated KNX controller directly via a KNX telegram, for
example, to determine the optimum flow temperature. If the function is enabled, the heating
actuator evaluates all the active 1-byte command values of the valve outputs and transmits the
externally received largest command value if there is a change by the interval preset in the ETS
or cyclically via the object "Largest command value".
iIn the case of valve outputs configured in the ETS to the command value data formats
"Switching (1-bit)" or "Constant (1-byte) with command value limiting value", there is no
evaluation of the command values preset via the bus.
Exception: It may also occur with such command value outputs that a constant command
value is active (after bus voltage return, after an ETS programming operation, during
manual operation, with an active forced position and with active emergency operation). In
this case, this constant command value is also included in the calculation of the largest
command value until the named functions with a higher priority are exited or a new
command value telegram is received via the bus, overriding the constant command value
at the valve output.
Page 52 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iAfter bus voltage return and an ETS programming operation, the actuator transmits the
current value of the largest command value without a delay, providing that automatic
transmission on change is configured. After a full device reset, the actuator does not
transmit automatically, when all the command values are set to 0 %.
After a device reset, the actuator immediately starts the time for cyclical transmission (if
configured), so that the object value effective after the reset is transmitted cyclically.
iA valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influence the
evaluation of the largest command value.
Optionally, the actuator can evaluate an external telegram for the largest command value (e.g.
from another heating actuator). This allows the cascading of multiple actuators with a command
value signal. The local heating actuator compares the 1-byte telegram value of the object
"External largest command value" with its own largest command value and outputs the largest
value via the object "Largest command value".
Enabling the "Largest command value" function
The "Largest command value" function must first be enabled on the "Valves / Pump" parameter
page, so that it can be used during actuator operation.
oSet the parameter "Activate 'Largest command value' function ?" to "yes".
The "Largest command value" function is activated. The actuator always compares the
1-byte command values of assigned valve outputs and signals the largest command value
via the communication object of the same name.
oSet the parameter "Activate 'Largest command value' function ?" to "no".
The function for transferring the largest command value is not available.
Configuring the transmission behaviour of the "Largest command value" function
The largest command value determined by the heating actuator is actively transmitted to the
bus. The "Transmit largest command value" parameter decides when a telegram is transmitted
via the "Largest command value" object.
oSet the parameter to "Only on change". Configure the parameter "Transmit on change by"
to the required change interval for automatic transmission.
A telegram is only transmitted when the largest command value changes by the configured
change interval.
oSet the parameter to "Only cyclical".
The actuator only transmits the "Largest command value" telegram cyclically. The cycle
time is defined globally for all feedback on the parameter page "General".
oSet the parameter to "On change and cyclically". Configure the parameter "Transmit on
change by" to the required change interval for automatic transmission.
The actuator transmits the "Largest command value" telegram cyclically and also when the
largest command value changes by the configured change interval.
Enabling recording of an external largest command value
Optionally, the actuator can evaluate an external telegram for the largest command value (e.g.
from another heating actuator). This allows the cascading of multiple actuators with a command
value signal.
The object must be enabled for an external largest command value to be recorded.
Page 53 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
oSet the "Record external largest command value ?" to "yes".
The "External largest command value" object is enabled. The local heating actuator
compares the 1-byte telegram value of this object with its own largest command value and
outputs the largest value via the object "Largest command value".
oSet the "Record external largest command value ?" to "no".
Recording of an external largest command value is not possible. The actuator
independently determines the largest command value of the valve outputs assigned to it.
iCyclical telegrams to the "External largest command value" object with the same telegram
value cause no reaction.
iAfter a device reset, there is no polling of the current status of the "External largest
command value" object. Only when a bus telegram is received does the actuator take this
value into account during evaluation of the largest command value.
Page 54 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
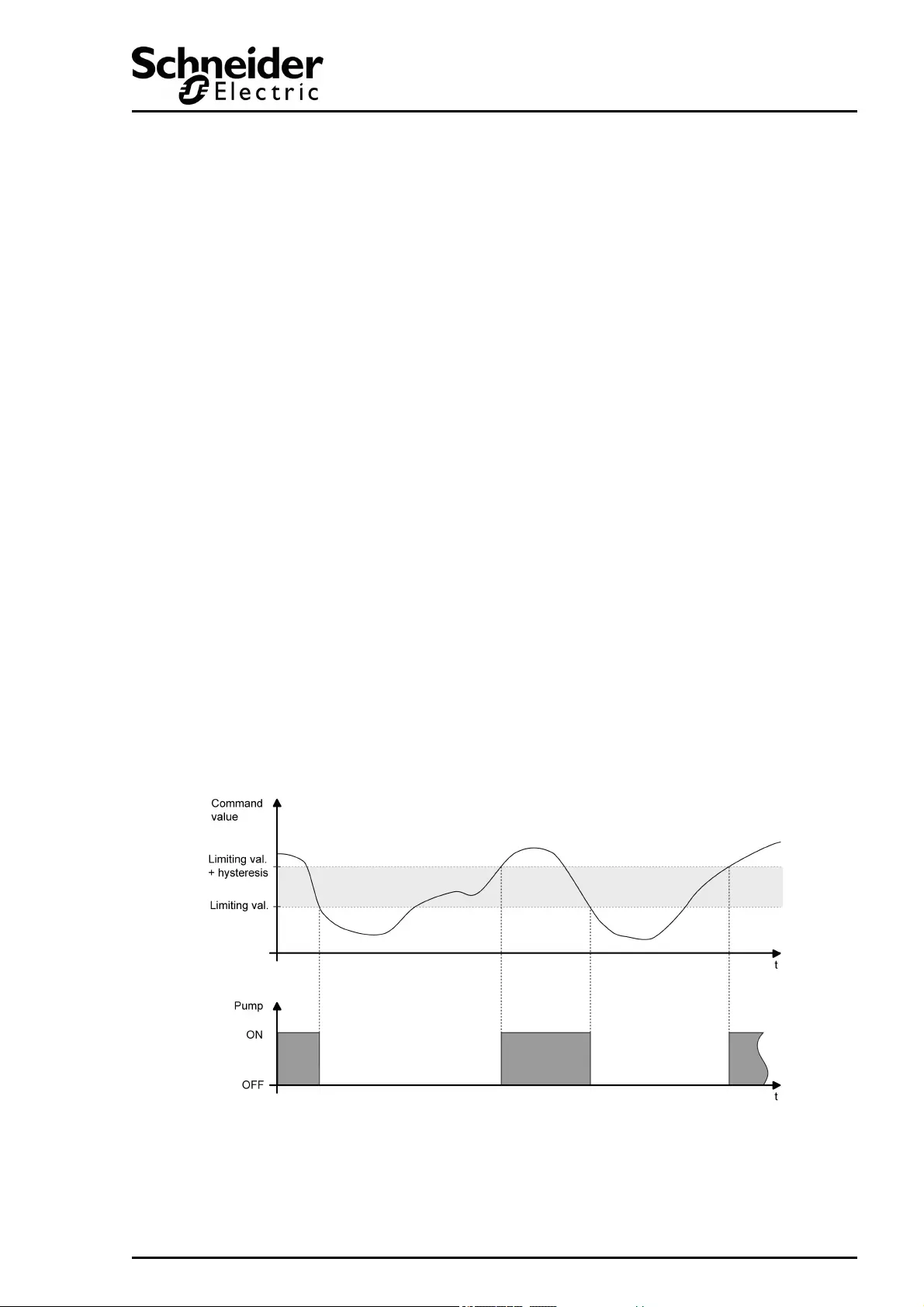
Art. No. MTN6730-0001
4.2.4.1.8 Pump control
The heating actuator allows switching activation of the circulation pump of the heating or cooling
circuit via a 1-bit KNX telegram. When using the pump controller, the pump is only switched on
by the actuator via the "Switch pump" object, when at least one command variable of the
assigned outputs exceeded a limiting value with hysteresis defined in the ETS. The pump is
switched off when the limiting value is reached or undershot again (Figure 8). This saves
electrical energy, as the pump is only activated by sufficiently large, and thus effective,
command values.
Optional cyclical anti-sticking protection prevents the sticking of the pump, if it has not been
switched on by the command value evaluation for a longer period of time. The telegram polarity
of the pump control can be configured.
iIn addition, valve outputs, which receive preset command values via the data format
"Switching (1-bit)" and "Switching (1-byte) with command value limiting value", influence
the pump control. In the case of "Switching (1-bit)", an "OFF" command value is interpreted
as "0 %" and an "ON" command value as "100 %". In the case of "Switching (1-byte) with
command value limiting value", the actuator evaluates the converted switching output
signal in the same way ("OFF" is interpreted as "0 %", "ON" is interpreted as "100 %").
iWith some functions and events, valve outputs, which are configured to the command
value data formats "Switching (1-bit)" and "Switching (1-byte) with command value limiting
value", are always activated via a constant command value through pulse width modulation
(PWM), providing that command values not equal to 0 % or 100 % are to be set (after bus
voltage return, after an ETS programming operation, during manual operation, with an
active forced position and with active emergency operation). PWM keeps being executed
until the named functions have been exited or, after the named events, no more lower-level
functions are active and a new command value telegram is received via the bus, overriding
the constant command value on the valve output.
In this case, the constant command value set by the PWM is also included in the pump
control.
iAfter bus voltage return and an ETS programming operation, the actuator always first
transmits the status "Pump OFF" without a delay. The actuator then updates the status to
"Pump ON", providing that the condition for this has been fulfilled and an optionally
configured "Pump delay ACTIVE" has elapsed.
iA valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influence the
pump control.
Figure 8: Pump control with sample command value characteristic
Optionally, the actuator can evaluate an external pump control signal (e.g. from another heating
actuator). This allows the cascading of multiple actuators with pump control. The local heating
Page 55 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
actuator links the 1-bit telegram value of the "External pump control" object with the internal
state of the pump logically as OR and outputs the result of this link via the "Switch pump" object.
The telegram polarity of the external object is fixed: "0" = Pump OFF, "1" = Pump ON.
The actuator only outputs the ON telegram to the pump after determination when the defined
delay time has elapsed. The pump is not switched on when the actuator determines within the
preset time that the pump must remain switched off, due to a limiting value plus hysteresis again
being undershot.
The actuator only outputs the OFF telegram to the pump after determination when the defined
delay time has elapsed. The pump is not switched on when the actuator determines within the
preset time that the pump must remain switched off, due to a limiting value again being
exceeded.
The delay times of the pump controller can be used as an example to match the running time of
the pump to the reaction time of the actuated actuators. Thus, a pump should only switch on
when the actuators actually open after electrical activation by the actuator (match pump ACTIVE
delay with the dead time of the actuators). The same applies to the closing of the valve drives.
If pump control is enabled, optional cyclical anti-sticking protection can prevent the sticking of
the pump, if it has not been switched on by the command value evaluation for a longer period of
time (e.g. in the case of heating systems in the summer months). When anti-sticking protection
is enabled, the parameter "Time for cyclical switching on of the pump" defines the weekly
interval of the protection function. If the pump is not switched on at least once during the set
time by the pump controller, then the actuator will executed anti-sticking protection, if necessary
on a regular basis. The cycle time is reset and restarted on each actuation of the pump by the
pump control. The cycle time is started for the first time after a device reset.
When anti-sticking protection is enabled, the parameter "Pump switch-on time" defines the
length of pump running for the cyclical protection function. The actuator then switches the pump
on for the set time without interruption, assuming that anti-sticking protection must be executed.
Enabling and configuring the pump control function
The pump control must first be enabled on the "Valves / Pump" parameter page, so that it can
be used during actuator operation.
oSet the "Activate 'Pump control' function ?" parameter to "yes". Configure the parameter
"Polarity of 'Pump control' object" to the required telegram polarity. In addition, define the
limiting value and hysteresis.
Pump control is activated. The pump is switched on according to the set telegram polarity,
if at least one command value of the assigned valve outputs exceeds the configured
limiting value plus hysteresis. The pump is switched off when the limiting value is reached
or undershot again.
The valve outputs must be assigned to the pump control individually on the parameter
pages "Ax - Assignments", so that they are included in the command value evaluation.
oSet the "Activate 'Pump control' function ?" parameter to "no".
Pump control is not available.
Enabling detection of an external pump control
Optionally, the actuator can evaluate an external telegram for pump control (e.g. from another
heating actuator). This allows the cascading of multiple actuators with pump control.
The object must be enabled for an external pump control signal to be detected.
oSet the parameter "Detect external pump control ?" to "yes".
The "External pump control" object is enabled. The local heating actuator links the 1-bit
telegram value of this object with the internal state of its own pump control logically as OR
and outputs the result of this link via the "Switch pump" object.
Page 56 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
oSet the parameter "Detect external pump control ?" to "no".
Recording of an external pump control signal is not possible. The actuator only controls the
pump itself.
iCyclical telegrams to the "External pump control" object with an identical telegram polarity
(ON -> ON, OFF -> OFF) cause no reaction.
iAfter a device reset, there is no polling of the current status of the "External pump control"
object. Only when a bus telegram is received does the actuator take this status into
account when controlling the pump.
Configuring the anti-sticking protection of the pump controller
If pump control is enabled, optional cyclical anti-sticking protection can prevent the sticking of
the pump, if it has not been switched on by the command value evaluation for a longer period of
time. The anti-sticking protection must first be enabled on the "Valves / Pump" parameter page,
so that it can be executed during actuator operation.
oSet the "Activate anti-sticking protection ?" parameter to "yes". In addition, define the
interval of the protection function in the parameter "Time for cyclical switching on of the
pump". Configure the parameter "Pump switch-on time" to the required length of the pump
run.
Anti-sticking protection is activated. If the pump is not switched on at least once during the
set cycle time by the pump controller, then the actuator will executed anti-sticking
protection, if necessary on a regular basis. The actuator then switches the pump on for the
preset switch-on time.
oSet the "Activate anti-sticking protection ?" parameter to "no".
Anti-sticking protection is deactivated.
iOnce started, the anti-sticking protection always runs through to the end. It cannot be
cancelled prematurely through the reception of new command values and the resulting
restart of the cycle time.
Page 57 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.1.9 Failure of the valve operating voltage
To activate the valve drives, the actuator requires a separate operating voltage supply (AC 24 V
or AC 230 V). Valve outputs can only be electrically activated when the valve operating voltage
supply is switched on. If there is no valve voltage supply, then the drives will move to their idle
position (deenergised opened / closed). To prevent a failure of the valve voltage supply at the
actuator from going undetected, a 1-bit fault signal can be optionally transmitted to the bus via
the object "Failure of operating voltage". The telegram polarity of this fault signal can be
configured.
If the actuator detects that there is no valve voltage, then the failure telegram ("Voltage failed")
is transmitted immediately. Only when the valve voltage has been reconnected will the actuator
retract the fault signal ("Voltage available").
A valve which has been completely opened (deenergised opened) by the failure of the valve
operating voltage is not include in the determination of heat requirement or the "Largest
command value" and has no influence on the pump control.
Enabling the signal "Failure of the valve operating voltage"
The failure signal on the valve operating voltage must first be enabled on the "Valves / Pump"
parameter page, so that it can be evaluated during actuator operation.
oSet the "Signal operating voltage failure of the valves?" parameter to "yes". Configure the
parameter "Polarity of 'Failure of operating voltage' object" to the required telegram polarity.
The failure signal is enabled. The actuator actively transmits a "Voltage failed" telegram
when it detects a failed or switched-off valve voltage supply, when the bus voltage supply is
still switched on. The actuator transmits a "Voltage available" telegram as soon as the
valve voltage supply is available again and the bus voltage is switched on.
oSet the "Signal operating voltage failure of the valves?" parameter to "no".
The failure signal is not available.
Setting the behaviour of the failure signal on bus voltage return
The object for the transmission of a failure of the valve operating voltage can actively transmit
the feedback information after a bus voltage return and an ETS programming operation. As an
option, it is possible to configure in the ETS whether active telegram transmission should take
place after a device reset or not.
After a device reset, the failure signal of the valve operating voltage supply can be optionally
time-delayed with the delay being preset globally for all device feedback together on the
"General" parameter page.
oSet the "Send feedback after bus voltage return ?" parameter to "yes".
The feedback "Failure of operating voltage" is transmitted actively after bus and mains
voltage return, after just bus voltage return or after programming in ETS.
oOnly on "Send feedback after bus voltage return ?" = "Yes": Set the parameter "Time delay
for feedback after bus voltage return ?" to "yes".
The feedback "Failure of operating voltage" is transmitted with a delay after bus and mains
voltage return, after just bus voltage return or after programming in ETS. No feedback is
transmitted during a running time delay, even if the state changes.
oOnly on "Send feedback after bus voltage return ?" = "Yes": Set the parameter "Time delay
for feedback after bus voltage return ?" to "no".
The feedback "Failure of operating voltage" is transmitted immediately after bus / mains
voltage return or after an ETS programming operation.
oSet the "Send feedback after bus voltage return ?" parameter to "no".
Page 58 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
The feedback is not transmitted automatically after a device reset.
Setting cyclical transmission of the failure signal
The signal telegram "Failure of operating voltage" can be transmitted cyclically, should the
actuator determine a failed valve operating voltage. If the valve operating voltage exists, then
transmission is generally not cyclical.
oSet the "Cyclical transmission of the feedback if no voltage present ?" parameter to "yes".
The actuator repeats the signal telegram "Failure of operating voltage", should a failed
valve operating voltage have been determined. The cycle time is defined for all feedback
on the "General" parameter page.
oSet the "Cyclical transmission of the feedback if no voltage present ?" parameter to "no".
The signal telegram "Failure of operating voltage" is generally not repeated cyclically.
iDuring a delay after bus/mains voltage return or an ETS programming operation,
transmission is not cyclical.
Page 59 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2 Channel-oriented functional description
4.2.4.2.1 Valve direction of action
The heating actuator possesses 6 electronic outputs, each of which can silently activate up to 4
(AC 230 V) or 2 (AC 24 V) actuators. Both deenergised closed and deenergised opened
actuators can be connected. The parameter "Valve in voltage-free state (valve direction of
action)" on the parameter pages "Ax - General" specifies which device type is connected to a
valve output.
iOnly actuators with the same characteristics may be connected to each valve output
(deenergised closed/opened). The drive type must match the configuration.
The configured valve direction of action is taken into account in each valve activation. With
1-byte command values and deenergised closed valves, the switch-on time is derived directly
from the configured PWM and the cycle time.
Example: PWM = 30 %, cycle time = 10 minutes -> Switch-on time = 3 minutes, switch-off time
= 7 minutes.
In the case of 1-byte command values and deenergised opened valves, the switch-on time is
inverted. Example: PWM = 30 %, cycle time = 10 minutes -> Switch-on time = 7 minutes,
switch-off time = 3 minutes.
On deenergised closed valve drives, command values are not inverted, in accordance with the
1-bit data format. Example: Command value ON -> Output switched on, Command value OFF -
> Output switched off.
By contrast, switching command values are inverted for deenergised opened valve drives.
Example: Command value ON -> Output switched off, Command value OFF -> Output switched
on.
iOn the LED status display, the valve direction of action configured for each output in the
ETS is not taken into account. As a result, the LEDs do not immediately display the valve
state (opened / closed). Inversion of the status display according to the valve direction of
action thus does not take place.
iIn the state as supplied, the valve direction of action for all the valve outputs is set to
"Deenergised closed".
Page 60 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.2 Reset behaviour
The states of the valve outputs after a bus voltage failure, bus or mains voltage return or after
an ETS programming operation can be set separately.
Presetting the behaviour in case of bus voltage failure
The parameter "Behaviour in case of bus voltage failure" is available separately for each valve
output on the parameter page "Ax - General". The actuator executes the behaviour configured
in the ETS when the bus voltage fails but the mains voltage supply is still available without
interruption. If the bus and mains voltage supply fails simultaneously, then the valve outputs will
not display the configured behaviour. In this case, even if valve voltage is available, the outputs
will always switch off, as the device electronics are no longer being supplied with energy and, as
a result, the actuator is unable to function. In this state of operation, deenergised closed valve
drives close completely and deenergised opened valve drives open. The configured valve
direction of action can no longer be evaluated if the bus and mains voltage fail.
iIf only the mains voltage supply fails but the bus and valve voltage remain, then the
actuator will not show a reaction.
oSet the parameter to "No change".
A bus voltage failure and mains voltage supply does not produce a reaction from the valve
output. The command value active before the bus voltage failure remains unchanged,
provided that the valve voltage supply is still switched on.
oSet the parameter to "Preset command value".
The actuator sets the command value preset for the valve output by the parameter
"Command value on bus voltage failure". For valve outputs configured in the ETS to the
command value data formats "Switching (1-bit)" or "Constant (1-byte) with command value
limiting value", a constant command value can also be preset using the parameter
"Command value on bus voltage failure". In this case, a pulse width modulation (5 % ... 95
%) is executed for the affected command value outputs. In the "0 %" and "100 %"
presettings, the valve outputs are activated continuously. The preset PWM remains active
until other functions (manual operation, short-circuit/overload) have been executed, which
may override the constant command value on the valve output.
oSet the parameter to "Activate command value as for forced position".
For the valve output, the actuator polls the command value preset for the forced position,
as configured in the ETS. Here, the active operating mode (summer / winter) is taken into
account, providing that a summer / winter change-over is configured. Ensure that, in this
setting, the forced position function is not executed! The actuator only polls the command
value preset for the forced position.
oSet the parameter to "Activate command value as for emergency operation".
For the valve output, the actuator polls the emergency operation command value, as
configured in the ETS. Here, the active operating mode (summer / winter) is taken into
account, providing that a summer / winter change-over is configured. Ensure that, in this
setting, emergency operation is not executed (as would be the case if there was a faulty
command value found in the course of command value monitoring)! The actuator only polls
the command value preset for emergency operation.
iIf there is a bus voltage failure, the actuator saves the active command value internally in
the device, so that the command value can be restored when the device power supply
returns (configurable). Saving only takes place after a previous device reset (ETS
programming operation, bus voltage return) when the reset is longer than 30 seconds
previously. Otherwise the actuator does not save the current command value! In that case,
an old value remains valid, as was previously saved by the actuator on the bus voltage
failure. If only the mains power supply fails, the actuator does not save the command value.
Page 61 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iIf the bus voltage fails while a manual operation on the device is activated, the parameter
"Behaviour in case of bus voltage failure" is not executed.
Behaviour after bus or mains voltage return presetting
The parameter "Behaviour after bus or mains voltage return" is available separately for each
valve output on the parameter page "Ax - General".
oSet the parameter to "Preset command value".
The actuator sets the command value preset for the valve output by the parameter
"Command value after bus or mains voltage return". For valve outputs configured in the
ETS to the command value data formats "Switching (1-bit)" or "Constant (1-byte) with
command value limiting value", a constant command value can also be preset using the
parameter "Command value after bus or mains voltage return". In this case, a pulse width
modulation (5 % ... 95 %) is executed for the affected command value outputs. In the "0 %"
and "100 %" presettings, the valve outputs are activated continuously. The preset PWM
remains active until other functions have been executed or a new command value telegram
is received via the bus, overriding the constant command value on the valve output.
oSet the parameter to "Activate command value as for forced position".
For the valve output, the actuator polls the command value preset for the forced position,
as configured in the ETS. Here, the active operating mode (summer / winter) is taken into
account, providing that a summer / winter change-over is configured. Ensure that, in this
setting, the forced position function is not executed! The actuator only polls the command
value preset for the forced position.
oSet the parameter to "Activate command value as for emergency operation".
For the valve output, the actuator polls the emergency operation command value, as
configured in the ETS. Here, the active operating mode (summer / winter) is taken into
account, providing that a summer / winter change-over is configured. Ensure that, in this
setting, emergency operation is not executed (as would be the case if there was a faulty
command value found in the course of command value monitoring)! The actuator only polls
the command value preset for emergency operation.
oSet the parameter to "Command value as before bus voltage failure".
After bus or mains voltage return, that command value is set at the valve output which was
active at the moment of the last bus voltage failure. If there is a bus voltage failure, the
actuator saves the active command value internally in the device, so that the command
value can be restored when the device power supply returns. Saving only takes place after
a previous device reset (ETS programming operation, bus voltage return) when the reset is
longer than 30 seconds previously. Otherwise the actuator does not save the current
command value! In that case, an old value remains valid, as was previously saved by the
actuator on the bus voltage failure. If only the mains power supply fails, the actuator does
not save the command value.
iA valve state set after bus/mains voltage return is added to the command value status
objects. Actively transmitting feedback objects also only transmit after bus/mains voltage
return, when the initialisation has finished, and if necessary the "Delay time after bus
voltage return" has elapsed.
Presetting the behaviour after ETS programming
The parameter "Behaviour after ETS programming" is available separately for each valve output
on the parameter page "Ax - General". This parameter can be used to configure the behaviour
of an output, irrespective of the behaviour after a bus/mains voltage return.
oSet the parameter to "Behaviour as after bus voltage return".
Page 62 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
After an ETS programming operation, the valve output will behaviour in the manner defined
in the parameter "Behaviour after bus or mains voltage return". If the behaviour there is
configured to "Command value as before bus voltage failure", then that command value is
also set after an ETS programming operation which was active at the time of the last bus
voltage failure. An ETS programming operation does not overwrite the saved command
value.
oSet the parameter to "Preset command value".
The actuator sets the command value preset for the valve output by the parameter
"Command value after ETS programming operation". For valve outputs configured in the
ETS to the command value data formats "Switching (1-bit)" or "Constant (1-byte) with
command value limiting value", a constant command value can also be preset using the
parameter "Command value after ETS programming operation". In this case, a pulse width
modulation (5 % ... 95 %) is executed for the affected command value outputs. In the "0 %"
and "100 %" presettings, the valve outputs are activated continuously. The preset PWM
remains active until other functions have been executed or a new command value telegram
is received via the bus, overriding the constant command value on the valve output.
oSet the parameter to "Activate command value as for forced position".
For the valve output, the actuator polls the command value preset for the forced position,
as configured in the ETS. Here, the active operating mode (summer / winter) is taken into
account, providing that a summer / winter change-over is configured. Ensure that, in this
setting, the forced position function is not executed! The actuator only polls the command
value preset for the forced position.
oSet the parameter to "Activate command value as for emergency operation".
For the valve output, the actuator polls the emergency operation command value, as
configured in the ETS. Here, the active operating mode (summer / winter) is taken into
account, providing that a summer / winter change-over is configured. Ensure that, in this
setting, emergency operation is not executed (as would be the case if there was a faulty
command value found in the course of command value monitoring)! The actuator only polls
the command value preset for emergency operation.
iThe behaviour after an ETS programming operation is only executed if there have been
changes in the configuration of the device. If just an application download is executed with
a project design already located in the actuator, then the actuator will execute the
configured "Behaviour after bus or mains voltage return".
iAn ETS programming operation can also be performed without mains voltage. The mains
voltage supply is not required for an ETS download.
iA valve state set after an ETS programming operation is added to the command value
status objects. Actively transmitting feedback objects also only first transmit after an ETS
programming cycle when the initialisation has finished and, if necessary, the "delay time
after bus voltage return" has elapsed.
iAn active manual mode will be terminated by an ETS programming operation.
Page 63 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.3 Data formats for command values
The heating actuator receives 1-bit or 1-byte command value telegrams, transmitted, for
example, by KNX room temperature controllers. Usually, the room temperature controller
determines the room temperature and generates the command value telegrams using a control
algorithm. The actuator controls its valve outputs either in switching form or with a PWM signal,
according to the data format of the command values and the configuration in the ETS. The cycle
time for constant PWM output signals can be configured separately for each valve output of the
heating actuator. This allows individual adaptation to different actuator types.
iIt should be noted that the heating actuator does not carry out temperature control itself.
The actuator converts received command value telegrams or command value presettings
from device functions into constant or switching output signals.
The "Data format of the command value input" parameter, which is available separately for each
valve output on the parameter pages "Ax - Command values/Status/Operating mode", specifies
the input format of the command value objects.
Data format of the command value input "Switching (1-bit)"
In the case of a 1-bit command value, the telegram received via the command value object is
forwarded directly to the appropriate output of the actuator, taking the configured valve direction
of action into account. This means that, if an "ON" telegram is received, the is valve completely
opened. The output is then energised for energised closed valves and the output is deenergised
for energised opened valve drives. The valve is closed completely when an "OFF" telegram is
received. The valve output is then not energised for deenergised closed valves and energised
for deenergised opened valve drives.
In the functions and events listed below, valve outputs configured to the command value data
formats "Switching (1-bit)" are always activated by a constant command value with pulse width
modulation (PWM), provided that command values not equal to 0 % or 100 % are to be set...
- Active forced position,
- Active emergency operation,
- On bus voltage failure,
- After bus or mains voltage return,
- After an ETS programming operation,
- During a manual operation.
PWM keeps being executed until the named functions have been exited or, after the named
events, no more lower-level functions are active and a new command value telegram is
received via the bus, overriding the constant command value on the valve output.
iIn the named cases, the constant command value is also included in the calculation of the
largest command value and that of the heat requirement and pump control (optional
functions).
iValve outputs, which receive preset command values via the data format "Switching
(1-bit)", influence the heat requirement and pump control. Here, an "OFF" command value
is interpreted as "0 %" and an "ON" command value as "100 %".
Data format of the command value input "Constant (1-byte) with pulse width modulation
(PWM)"
Command values corresponding to the data format "Constant (1-byte)" are implemented by the
actuator with an equivalent pulse-width-modulated switch signal at the valve outputs. Taking the
cycle time settable in the actuator for each output into account, the average output signal
resulting from this modulation is a measure of the centred valve position of the control valve and
thus a reference for the set room temperature. A shift of the mean value, and thus a change in
the heating capacity, can be obtained by changing the duty factor of the switch-on and switch-
off pulses of the output signal (Figure 9). The duty factor is adapted constantly by the actuator,
Page 64 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
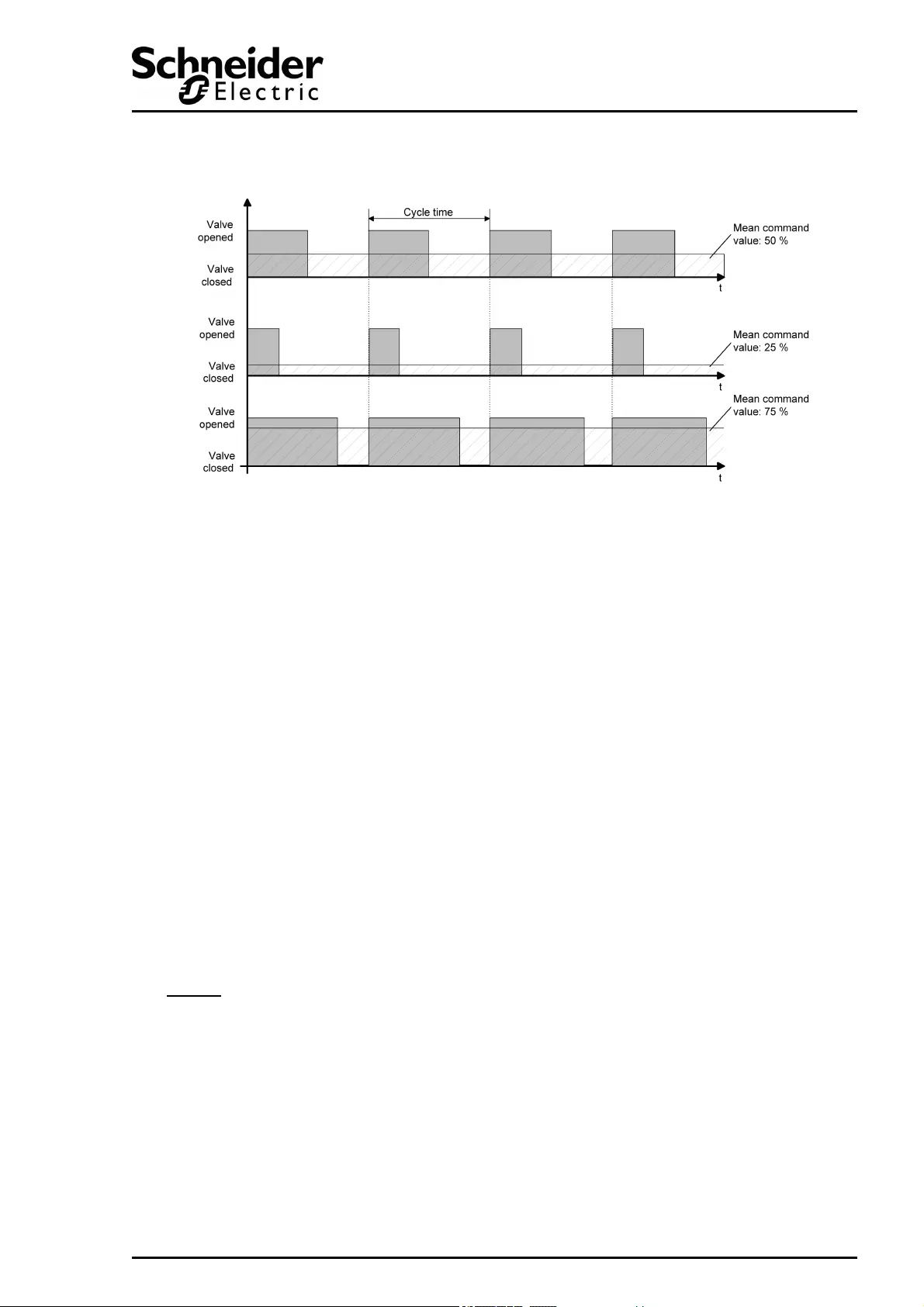
Art. No. MTN6730-0001
depending on the command value received (normal operation) or by active device functions
(e.g. manual operation, forced position, emergency operation).
Figure 9: Resulting mean value through variable duty factor with pulse width modulation
In accordance with the configured valve direction of action, the appropriate outputs are either
energised or deenergised, depending on the valve position to be approached. In so doing, the
duty factor is inverted automatically for a deenergised opened drive. Thus, depending on the
valve type used, there is no unintended mean value shift.
Example: Command value: 60 % ->
- Duty factor, deenergised closed: 60 % ON, 40 % OFF,
- Duty factor, deenergised opened: 40 % ON, 60 % OFF.
Example: Command value: 100 % ->
- Duty factor, deenergised closed: Permanently ON,
- Duty factor, deenergised opened: Permanently OFF.
Often, control circuits are subject to non-constant changes in the setpoint presetting (e.g. frost
protection, night operation, etc.) or short-time interference (e.g. measured value deviations due
to brief opening of windows or doors near the sensor). For the setting of the scanning ratio of
the required command value to take place as quickly and correctly in these cases, even with a
longer set cycle time, without any negative impact on the reaction time of the control section, the
actuator uses a special method for continuous command value adjustment.
The following cases are taken into account...
- Case 1
Command value change, e.g. from 80 % to 30 %, during the opening phase of the valve
(Figure 10).
Before the reception of the new command value (30 %), the old setpoint (80 %) was active.
The new command value is received during the opening phase of the valve. At this point,
the actuator detects that it is still possible to shorten the opening phase, so that it
corresponds to the new command value (30 %). The cycle time is not affected by this
operation.
The new duty factor is set immediately after the reception of the new command value.
Page 65 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
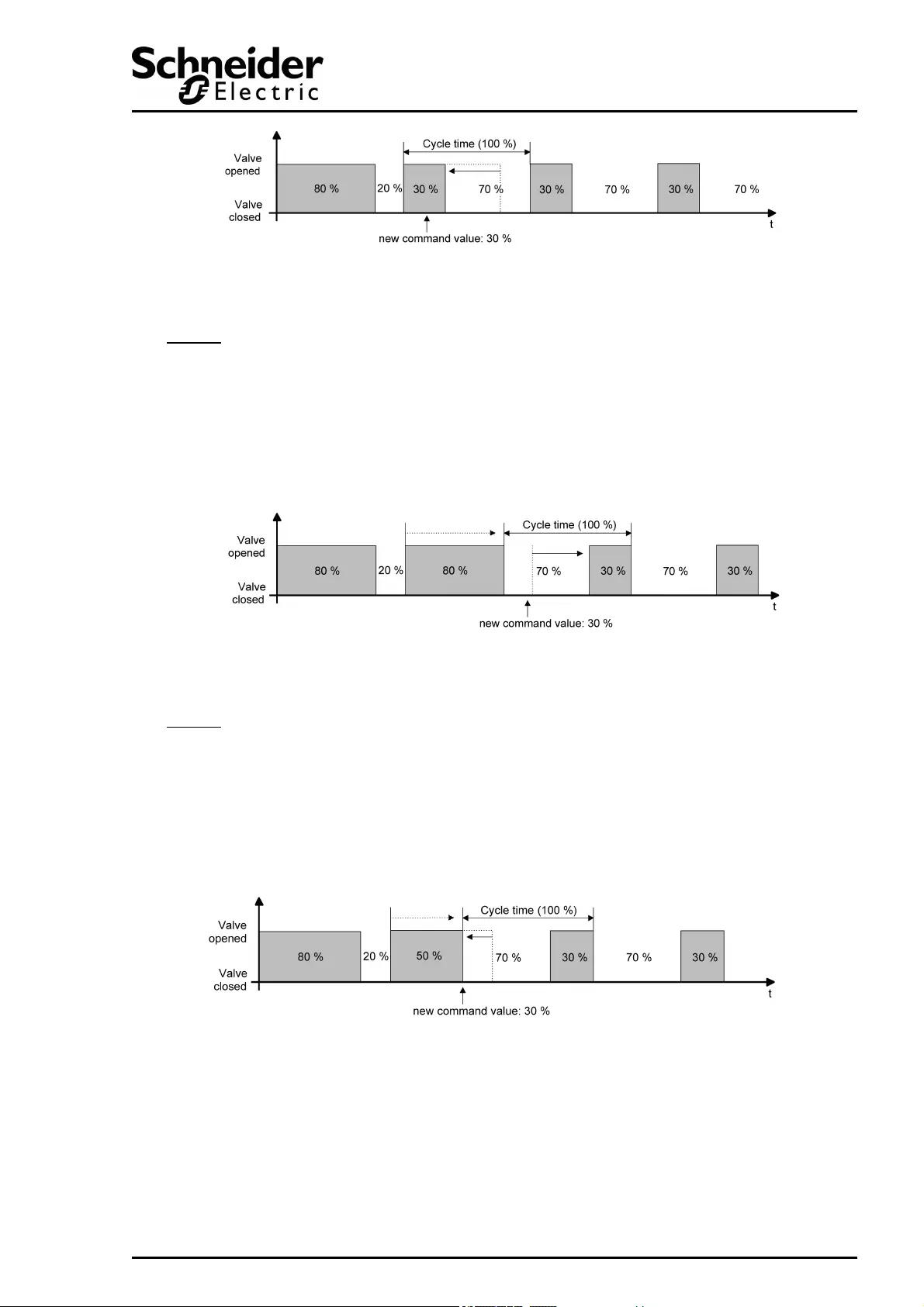
Art. No. MTN6730-0001
Figure 10: Example of a command value change 80 % -> 30 % during the opening phase of the
valve
- Case 2
Command value change, e.g. from 80 % to 30 %, during the closing phase of the valve
(Figure 11).
Before the reception of the new command value (30 %), the old setpoint (80 %) was active.
The new command value is received during the closing phase of the valve. At this point,
the actuator detects that it is still possible to extend the closing phase, so that it
corresponds to the new command value (30 %). The cycle time remains unchanged, but
the starting time of the period is shifted automatically.
The new duty factor is set immediately after the reception of the new command value.
Figure 11: Example of a command value change 80 % -> 30 % during the closing phase of the
valve
- Case 3
Command value change, e.g. from 80 % to 30 % during the opening phase of the valve
(opening phase too long) (Figure 12).
Before the reception of the new command value (30 %), the old setpoint (80 %) was active.
The new command value is received during the opening phase of the valve. At this point,
the actuator detects that it is necessary to cancel the opening phase immediately and close
the valve, so that the duty factor corresponds to the new command value (30 %). The cycle
time remains unchanged, but the starting time of the period is shifted automatically.
The new duty factor is set immediately after the reception of the new command value.
Figure 12: Example of a command value change 80 % -> 30 % during the opening phase of the
valve (opening phase too long)
Page 66 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
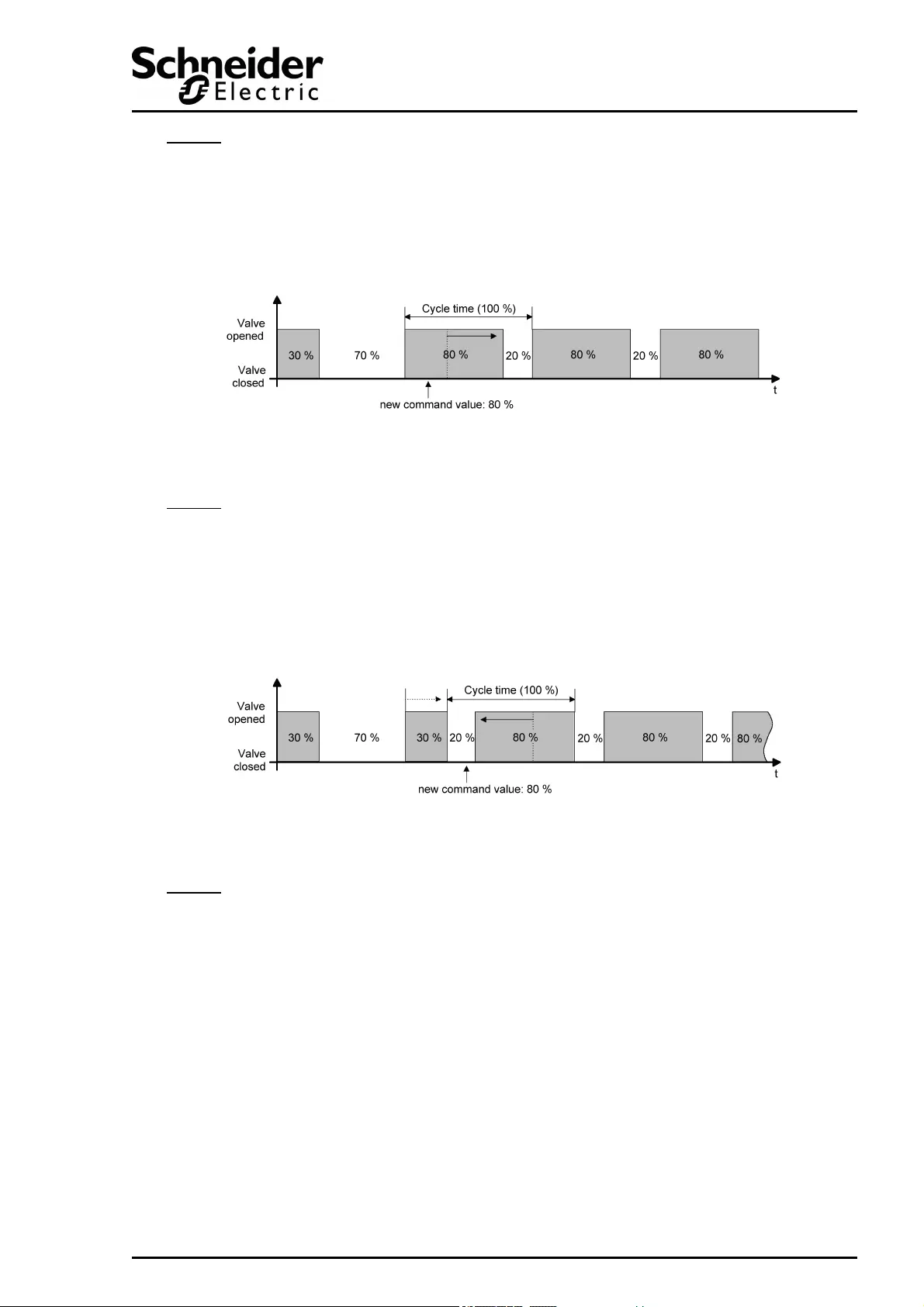
Art. No. MTN6730-0001
- Case 4
Command value change, e.g. from 30 % to 80 %, during the opening phase of the valve
(Figure 13).
Before the reception of the new command value (80 %), the old setpoint (30 %) was active.
The new command value is received during the opening phase of the valve. At this point,
the actuator detects that it is still possible to extend the open phase, so that it corresponds
to the new command value (80 %). The cycle time is not affected by this operation.
The new duty factor is set immediately after the reception of the new command value.
Figure 13: Example of a command value change 30 % -> 80 % during the opening phase of the
valve
- Case 5
Command value change, e.g. from 30 % to 80 %, during the closing phase of the valve
(Figure 14).
Before the reception of the new command value (80 %), the old setpoint (30 %) was active.
The new command value is received during the closing phase of the valve. At this point,
the actuator detects that it is still possible to reduce the closing phase, so that it
corresponds to the new command value (80 %). The cycle time remains unchanged, but
the starting time of the period is shifted automatically.
The new duty factor is set immediately after the reception of the new command value.
Figure 14: Example of a command value change 30 % -> 80 % during the closing phase of the
valve
- Case 6
Command value change, e.g. from 30 % to 80 %, during the closing phase of the valve
(closing phase too long) (Figure 15).
Before the reception of the new command value (80 %), the old setpoint (30 %) was active.
The new command value is received during the closing phase of the valve. At this point,
the actuator detects that it is necessary to cancel the closing phase immediately and open
the valve, so that the duty factor corresponds to the new command value (80 %). The cycle
time remains unchanged, but the starting time of the period is shifted automatically.
The new duty factor is set immediately after the reception of the new command value.
Page 67 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
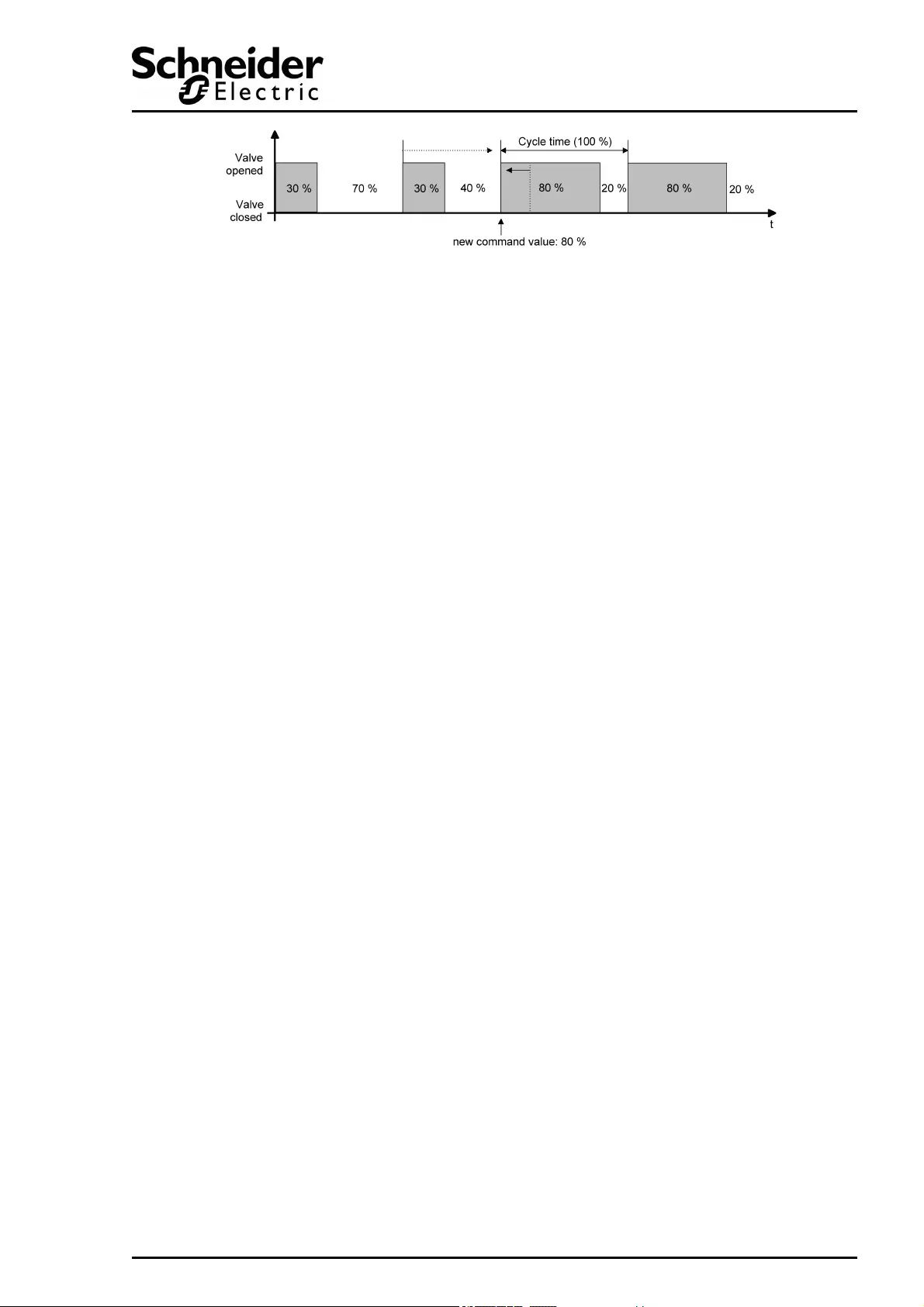
Art. No. MTN6730-0001
Figure 15: Example of a command value change 30 % -> 80 % during the opening phase of the
valve (opening phase too long)
Data format of the command value input "Switching (1-byte) with command value limiting
value"
The data format with limiting value evaluation can be used as an alternative to the conversion of
a 1-byte command value into constant pulse width modulation at a valve output. Here, the
received constant command value is converted into a switching output signal, depending on the
configured limiting value. The actuator opens when the command value reaches the limiting
value or exceeds it (Figure 16). A hysteresis is also evaluated to prevent constant closing and
opening of the actuator for command values in the area of the limiting value. The actuator only
closes when the command value undershoots the limiting value minus the configured
hysteresis.
The 1-byte data format with limiting value evaluation allows the conversion of constant feedback
control by the heating actuator into a two-point controller. This principle is particularly suitable
for underfloor heating, in which constant valve activation does not produce the desired heating
reaction, on account of the sluggishness. With sluggish underfloor heating systems, small
constant command values (only short switch-on phases of the PWM) frequently do not produce
any significant level of heating. With large constant command values, the short switch-off
phases of a PWM usually have no effect on underfloor heating systems or comparable heating
systems. Here, two-point feedback control offers a simple, effective alternative. The valves open
or close completely. During activation, unnecessary constant valve positions are avoided using
command value telegrams. In addition, the service life of the electrothermal actuators is
increased.
The conversion of the constant input signal into a switching command value takes place
internally in the device. During processing, the actuator evaluates the converted command
value as if it were a received 1-bit command value. It forwards the status directly to the
appropriate output, taking the configured valve direction of action into account. Thus, on a
"Open valve" command (received command value >= limiting value), the valve is opened
completely. The output is then energised for energised closed valves and the output is
deenergised for energised opened valve drives. On a "Close valve" command (received
command value < limiting value - hysteresis), the valve is closed completely. The valve output is
then not energised for deenergised closed valves and energised for deenergised opened valve
drives.
As with a 1-bit input command value, in the functions and events listed below, valve outputs
configured to the command value data formats "Constant (1-byte) with command value limiting
value" are always activated by a constant command value with pulse width modulation (PWM),
provided that command values not equal to 0 % or 100 % are to be set...
- Active forced position,
- Active emergency operation,
- On bus voltage failure,
- After bus or mains voltage return,
- After an ETS programming operation,
- During a manual operation.
Page 68 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
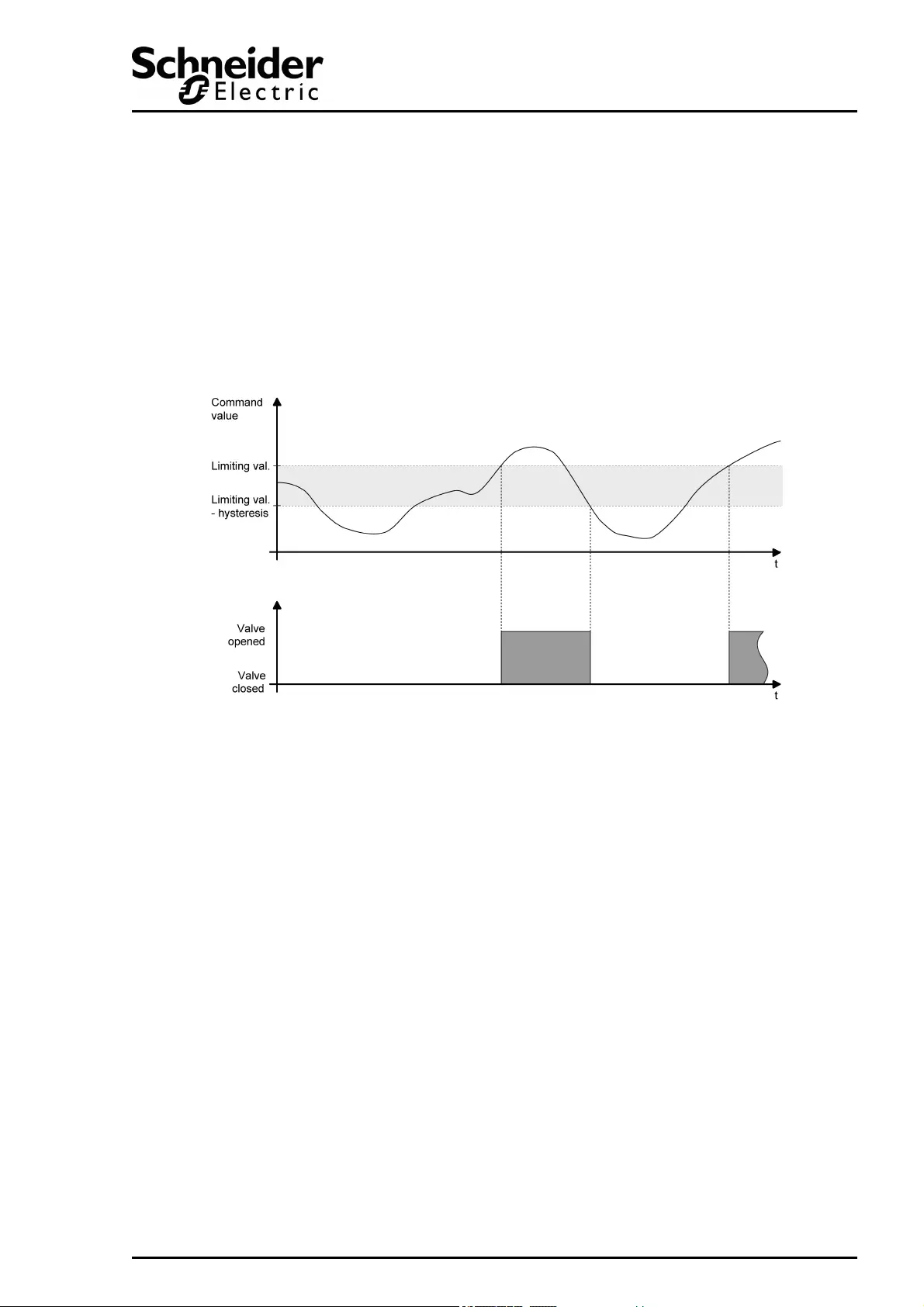
Art. No. MTN6730-0001
PWM keeps being executed until the named functions have been exited or, after the named
events, no more lower-level functions are active and a new command value telegram is
received via the bus, overriding the constant command value on the valve output.
iIn the named cases, the constant command value is also included in the calculation of the
largest command value and that of the heat requirement and pump control (optional
functions).
iValve outputs, which receive preset command values via the data format "Switching
(1-byte) with command value limiting value", influence the heat requirement and pump
control. Here, the actuator evaluates the converted switching output signal in the same way
("OFF" is interpreted as "0 %", "ON" is interpreted as "100 %").
Figure 16: Example of command value evaluation with limiting value
Page 69 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
Art. No. MTN6730-0001
4.2.4.2.4 Cycle time
The "Cycle time" parameter specifies the period length of the pulse-width-modulated output
signal of a valve output. It allows adaptation to the adjusting cycle times (the adjusting time it
takes the drive to bring the valve from its completely closed to its completely opened position) of
the actuators used. In addition to the adjusting cycle time, take account of the dead time (the
time in which the actuators do not show any response when being switched or off). If different
actuators with different adjusting cycle times are used at an output, take account of the longest
of the times.
iThe "Cycle time" parameter is also available for valve drives, whose command value data
format is configured to "Switching (1-bit)" or
"Constant (1-byte) with command value limiting value". For such valve outputs, pulse width
modulation can also be executed during an active forced position, emergency operation,
manual operation, bus voltage failure, after bus or mains voltage return or after an ETS
programming operation, for which, as a result, the presetting of a cycle time is required.
Generally, two different options of how to set the cycle time can be identified:
Case 1
Cycle time > 2 x Adjusting cycle time of the drives used (ETA)
In this case, the switch-on and switch-off times of the actuator are long enough for the actuators
to have sufficient time to fully open and fully close within a given period (Figure 17).
- Advantage:
The desired mean value for the command value and thus for the required room
temperature will be set relatively precisely, even for several actuators triggered at the same
time.
- Disadvantage:
It should be noted, that, due to the full valve lift, the life expectancy of the actuators can
diminish. For very long cycle times (> 15 minutes) with less sluggishness in the system, the
heat emission into the room, for example, in the vicinity of the radiators, can possibly be
non-uniform and be found disturbing.
iThis cycle time setting is recommended for slower, more sluggish heating systems (such
as underfloor heating).
iEven for a bigger number of triggered actuators, maybe of different types, this setting can
be recommended to be able to obtain a better mean value of the adjusting travels of the
valves.
Page 70 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
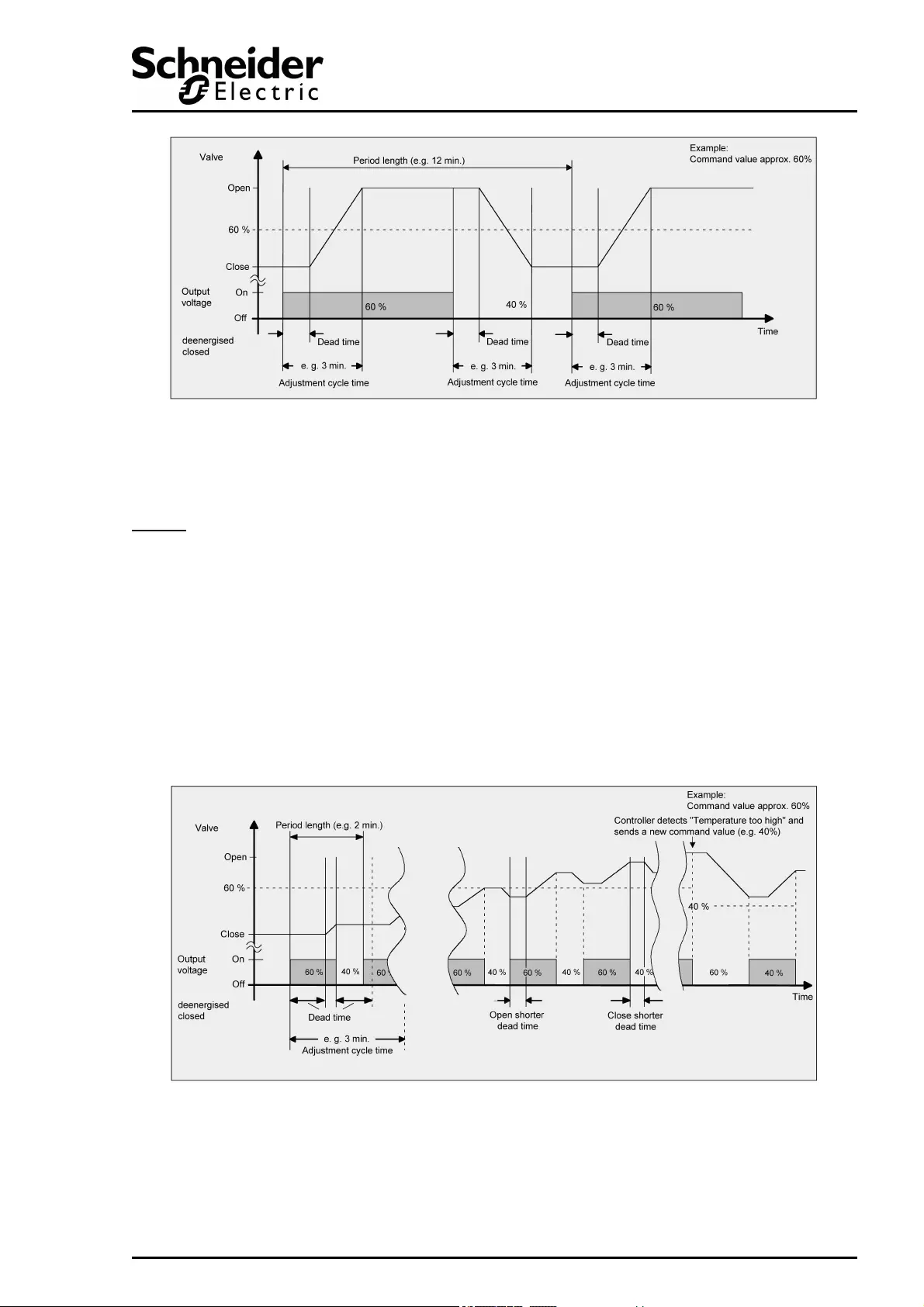
Art. No. MTN6730-0001
Figure 17: Ideal course of the valve stroke for a
cycle time > 2 x Adjustment cycle time
Case 2
Cycle time < Adjusting cycle time of the drives used (ETA)
In this case, the switch-on and switch-off times of the actuator are too short for the actuators to
have enough time to fully open and fully close within a given period (Figure 18).
- Advantage: This setting ensures continuous water flow through the radiators, thus
facilitating uniform heat emission into the room. If only one actuator is triggered the
regulator can continuously adapt the variable to compensate the mean value shift caused
by the short cycle time, thus setting the desired room temperature.
- Disadvantage: If more than one actuator is activated at the same time, the desired mean
value will become the variable, which will result in a very poor adjustment of the required
room temperature, or in adjustment of the latter with major deviations, respectively.
iThis setting is recommended for quicker heating systems (such as radiators).
Figure 18: Ideal course of the valve stroke for a
cycle time < Adjustment cycle time
The continuous flow of water through the valve, and thus the continuous heating of the drives
causes variations and changes to the dead times of the drives during the opening and closing
Page 71 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
phase. The short cycle time and the dead times means that the required command value (mean
value) is only set with a possibly large deviation. For the room temperature to be regulated
constantly after a set time, the controller must continually adjust the command value to
compensate for the mean value shift caused by the short cycle time. Usually, the control
algorithm implemented in the controller (PI control) ensures that control deviations are
compensated.
Page 72 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.5 Forced position
A forced position can be configured separately for each valve output and activated according to
requirements. If a forced position is active, a defined command value is set at the output.
Affected valve outputs are then locked so that they can no longer be activated using functions
subject to the forced position (including activation by command value telegrams).
The command value of the forced position is always constant and is configured individually in
the ETS (0...100 % in 10 % steps). The command value is executed electrically at the output
using a pulse width modulation (PWM).
iWhen a forced position is active, valve outputs configured to the command value data
formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting value" are
always activated by a constant command value with pulse width modulation. In this case,
this constant command value is also included in the calculation of the largest command
value (optional function) until the forced position is exited and no other function with a
constant command value presetting (e.g. emergency operation, manual operation) is
active.
iThe configured valve direction of action (deenergised closed / deenergised opened) is
taken into account in the electrical activation of the outputs by a forced position. With
deenergised closed valves, the switch-on time is derived directly from the configured PWM
and the cycle time. In the case of deenergised opened valves, the switch-on time is
inverted.
The actuator possesses a summer / winter switch-over. Depending on the season, this allows
the setting of different command value setpoints for a valve output for forced position (see
page 49). It is also possible to switch over the operating mode during an active forced position.
In this case, the value belonging to the operating mode is activated immediately after the switch-
over.
If no summer / winter switch-over is planned in the actuator, then only a command value can be
configured in the ETS for the forced position.
For each valve output, the forced position is activated and deactivated via a separate 1-bit
object. The telegram polarity can be configured. According to the priority control, an active
forced position can be overridden by other device functions with a higher priority (e.g. service
mode, manual operation). At the end of a higher priority function, the actuator executes the
forced reaction for the valve outputs concerned once again if the forced position is still activated
at this time.
Optionally, the command value of the forced position can also be activated in case of bus
voltage failure, after bus/mains voltage return or after an ETS programming operation. This is
only the recall of the configured command value and not the activation of the forced position as
takes place via the 1-bit object.
iThe command value preset by an active forced position is also included in the
determination of heat requirement. In addition, the command value of the forced position
has an influence on the pump control.
At the end of a forced position, the behaviour of a valve output is permanently defined. For the
affected valve outputs, the actuator always tracks the state most recently preset by functions
with a lower priority (emergency operation) or by normal bus operation (activation by command
value telegrams).
iAfter a device reset (bus/mains return, ETS programming operation), the command value
objects first contain the value "0".
Enabling the forced position object and configuring the forced position
For the forced position to be used as a locking function, it must first be enabled in the ETS on
the parameter page "Ax - Command value/Status/Operating mode" and be visibly switched by
the communication object.
Page 73 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
oSet the parameter "Use object for forced position ?" to "yes". Define the parameter "Polarity
of 'Forced position' object" to the required telegram polarity. In addition, configure the
required command values (optional for summer and winter mode).
The forced position object is enabled. The affected valve output is locked by a telegram
according to the "Forced operation active" polarity at the defined command value (optional
according to the most recently preset operating mode).
oSet the parameter "Use object for forced position ?" to "no".
The forced position object is not enabled. The forced position for locking the valve output is
not possible. Only the command values can be configured, so that a state for the reset
behaviour of the valve output can be optionally defined.
iUpdates of the object from "Forced position active" to "Forced position active" or from
"Forced position inactive" to "Forced position inactive" produce no reaction.
iThe status preset via the forced position object is stored internally in the device after a bus
voltage failure and and is restored automatically after a bus and/or mains voltage return.
After a bus/mains voltage return, the actuator activates the forced position, thus locking the
output, if the tracked state allows this. However, when presetting the command values, only
that behaviour is significant, according to the priority sequence, which the parameter
"Behaviour after bus or mains voltage return" devices (the command value of the forced
position is not activated).
The tracked state of the forced position is not then automatically tracked in the
communication object by the actuator.
iAfter an ETS programming operation, a forced position is always deactivated and the
forced position object is "0". In the polarity "0" = Forced position active / "1" = No forced
position, a "0" telegram must first be received to activate the forced position.
If, after a bus/mains voltage return, the previously stored object value "0" is restored, then
actuator will also activate the forced position in the polarity "0 = Forced position active / 1 =
No forced position", thus locking the output.
iIf the forced position object is not enabled, then only the command value parameters are
available, so that valid preset values are available for the actuator reset behaviour, as
required ("Activate command values as for forced position").
Page 74 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.6 Cyclical command value monitoring / emergency operation
If necessary, cyclical monitoring of the command values can be performed. If, during active
cyclical monitoring, there are no command value telegrams during a preset time, then
emergency operation is activated for the affected valve output, for which a configurable constant
PWM command value can be preset in the ETS.
The command value of emergency operation is always constant and is configured individually in
the ETS (0...100 % in 10 % steps). The command value is executed electrically at the output
using a pulse width modulation (PWM).
iWhen emergency operation is active, valve outputs configured to the command value data
formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting value" are
always activated by a constant command value with pulse width modulation. In this case,
this constant command value is also included in the calculation of the largest command
value (optional function) until the emergency operation is exited and no other function with
a constant command value presetting (e.g. forced position, manual operation) is active.
iThe configured valve direction of action (deenergised closed / deenergised opened) is
taken into account in the electrical activation of the outputs by emergency operation. With
deenergised closed valves, the switch-on time is derived directly from the configured PWM
and the cycle time. In the case of deenergised opened valves, the switch-on time is
inverted.
The actuator possesses a summer / winter switch-over. Depending on the season, this allows
the setting of different command value setpoints for a valve output for emergency operation
(see page 49). It is also possible to switch over the operating mode during active emergency
operation. In this case, the value belonging to the operating mode is activated immediately after
the switch-over.
If no summer / winter switch-over is planned in the actuator, then only a command value can be
configured in the ETS for emergency operation.
If command value monitoring is enabled, then the actuator will check the arrival of telegrams on
the command value object during a settable time period. The time period is defined separately
for each valve output by the "Monitoring time" parameter. The time set there should be at least
double the time for the cyclical transmission of the command value of the controller, in order to
ensure that at least one telegram is received within the monitoring time. Cyclical command
value monitoring takes place continuously. The actuator retriggers the monitoring time
automatically on each command value telegram received and after a device reset. If there are
no command value telegrams during the monitoring time, then the actuator will activate
emergency operation.
iIf the bus control of a valve output was disabled during permanent manual operation, then
no command value monitoring is performed for the affected output. This exits active
emergency operation. When bus control is enabled by a permanent manual operation, the
actuator restarts the monitoring time and checks for incoming command value telegrams.
According to the priority control, active command value monitoring can be overridden by other
device functions with a higher priority (e.g. service mode, manual operation). At the end of a
higher priority function, the actuator executes emergency operation for the valve outputs
concerned once again, if it is still activated by missing command value telegrams.
Optionally, the command value of emergency operation can also be activated in case of bus
voltage failure, after bus/mains voltage return or after an ETS programming operation. This is
only the recall of the configured command value and not the activation of emergency operation,
as takes place during command value monitoring.
iThe command value preset by active emergency operation is also included in the
determination of heat requirement. In addition, the command value of emergency operation
has an influence on the pump control.
At the end of emergency operation (new input command value received), the behaviour of a
valve output is permanently defined. If no function with a higher priority is active, the actuator
always tracks the state for the affected valve outputs most recently preset by normal bus
operation (activation by command value telegrams).
iAfter a device reset (bus/mains voltage return, ETS programming operation), the command
value objects first contain the value "0".
Page 75 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iThe state or emergency operation (active or inactive) is saved internally in the device after
a bus voltage failure and and is restored automatically after a bus and/or mains voltage
return. After a bus/mains voltage return, the actuator activates emergency operation, if the
tracked state allows this.
The actuator makes the 1-bit status telegram "Command value fault" available. As soon as a
command value telegram is missing on a monitored valve output, and thus emergency
operation is activated, then the actuator transmits a fault signal via this status object. The
telegram polarity can be configured. Only after at least one command value telegram has been
received for the monitored valve output does the actuator retract the fault signal for cyclical
monitoring. Optionally, the fault telegram can also be transmitted cyclically during active
emergency operation.
iImmediately after the bus voltage return or an ETS programming operation, the object
"Command value fault" does not transmit the status automatically. A faulty command value
must be detected again (expiry of the monitoring time without a command value telegram)
for the object value to be transmitted. This is also the case if a saved emergency operation
was restored after a device reset.
Enable cyclical command value monitoring
Cyclical command value monitoring can only be used if it has been enabled in the ETS.
oSet the parameter "Activate command value monitoring ?" on parameter page "Ax -
Command value/Status/Operating mode" to "Yes". Configure the "Monitoring time" of the
command value monitoring.
Cyclical command value monitoring is activated. If there are no command value telegrams
during the monitoring time preset by the parameter of the same name, then emergency
operation is activated for the affected valve output, for which the actuator sets to a
configurable constant PWM command value. This command value is fined by the
Command value in the case of emergency operation..." parameter (if necessary, separately
for summer and winter mode).
oSet the parameter "Activate command value monitoring ?" to "no".
Cyclical command value monitoring is deactivated.
Configuring the fault signal for cyclical command value monitoring
If a command value fault is identified, then the actuator can optionally transmit a fault telegram
via the object "Command value fault".
oSet the parameter "Polarity of 'Command value fault' object" on parameter page "Ax -
Command value/Status/Operating mode" to the required telegram polarity.
As soon as a command value telegram is missing on a monitored valve output, and thus
emergency operation is activated, then the actuator transmits a fault signal via the status
object "Command value fault" according to the configured telegram polarity. Only after at
least one command value telegram has been received for the monitored valve output does
the actuator retract the fault signal for cyclical monitoring.
oSet the parameter "Cyclical transmission in the case of faulty command value ?" to "yes".
If a command value fault is identified, then the actuator transmits the fault telegram
cyclically. The cycle time is defined for all cyclical status and feedback functions on the
"General" parameter page.
oSet the parameter "Cyclical transmission in the case of faulty command value ?" to "no".
Page 76 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
If a command value fault is identified, then the actuator transmits the fault telegram only
once.
Page 77 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.7 Command value limit
If a valve output is activated using constant command value telegrams and the command value
data format "Constant (1-byte) with pulse width modulation (PWM), a command value limit can
optionally be used in the ETS. The command value limit allows the restriction of the command
values received via the bus or emergency operation commands during a command value limit to
the range limits "minimum" and "maximum". A minimum command value can be used, for
example, for the implementation of basic heating or cooling. A maximum command value allows
the limitation of the effective command value range, which usually has a positive influence on
the lifespan of actuators.
The limits are permanently set in the ETS and, if command value limitation is active, can be
neither undershot or exceeded during device operation.
As soon as the command value limit is active, received command values or those preset via
emergency operation are limited according to the limiting values from the ETS. The behaviour
with regard to the minimum or maximum command value is then as follows...
- Minimum command value:
The "Minimum command value" parameter specifies the lower command value limiting
value. The setting can be made in 5 % increments in the range 0 % ... 50 %. With an active
command value limit, the set minimum command value is not undershot by command
values. If the actuator receives smaller preset command values (including 0 %), it sets the
configured minimum command value.
- Maximum command value:
The "Maximum command value" parameter specifies the upper command value limiting
value. The setting can be made in 5 % increments in the range 55 %...100 %. With an
active command value limit, the set maximum command value is not exceeded. If the
controller receives larger preset command values, it sets the configured maximum
command value.
If the command value limit is removed, the actuator does not automatically track the most
recently preset command value to the unlimited values. After the retraction of the limit, a new
command value must first be preset, so that these new values are implemented at the valve
output.
Enabling the command value limit
The command value limit can only be used if it has been enabled in the ETS.
oSet the "Command value limit ?" parameter on parameter page "Ax - Command
value/Status/Operating mode" to "Yes".
The command value limit is enabled. The "Activation of the command value limit"
parameter defines whether the limiting function can be activated or deactivated as required
via a communication object. Alternatively, the command value limit can be permanently
active.
oSet the "Command value limit ?" parameter to "no".
The command value limit is not available.
Setting the activation of the command value limit
The "Activation of the command value limit" parameter on the parameter page "Ax - Command
value/Status/Operating mode" defines the mode of action of the limiting function.
The command value limit must be enabled.
oSet the parameter to "By object 'Command value limit".
Page 78 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
The command value limit can only be activated using the 1-bit communication object
"Command value limit" ("1" telegram) or deactivated ("0" telegram). The behaviour of the
command value limit is definable separately after a device reset (bus voltage return, ETS
programming operation).
oSet the parameter to "Permanently activated".
The command value limit is permanently active. It cannot be influenced via an object.
Command values preset via the KNX or via emergency operation are always limited.
Setting the initialisation behaviour of the command value limit
The command value limit can either be activated or deactivated using the 1-bit communication
object "Command value limit", or be permanently active. When controlling via the object, it is
possible to have the actuator activate the command value limit automatically after bus voltage
return or an ETS programming operation. The parameters "Activate command value limit after
bus voltage return ?" and "Activate command value limit after ETS programming" define the
initialisation behaviour.
iWith a permanently active command value limit, the initialisation behaviour cannot be
configured after bus voltage return or an ETS programming operation, as the limit is always
active. In this case, no object is available.
The command value limit must be enabled.
oSet the "Activate command value limit after bus voltage return ?" parameter to "no".
The command value limit is not activated automatically after bus voltage return. A "1"
telegram must first be received via the "Command value limit" object for the limiting function
to be activated.
oSet the "Activate command value limit after bus voltage return ?" parameter to "yes".
In this setting, the actuator does not activate the command value limit automatically after
bus voltage return. To deactivate the limit a "0" telegram must be received via the
"Command value limit" object. The limit can be switched on or off at any time using the
object.
oSet the "Activate command value limit after ETS programming ?" parameter to "no".
The command value limit is not activated automatically after an ETS programming
operation. A "1" telegram must first be received via the "Command value limit" object for
the limiting function to be activated.
oSet the "Activate command value limit after ETS programming ?" parameter to "yes".
In this setting, the actuator activates the command value limit automatically after an ETS
programming operation. To deactivate the limit a "0" telegram must be received via the
"Command value limit" object. The limit can be switched on or off at any time using the
object.
iThe status of the command value limit is not automatically tracked in the communication
object after a device reset.
iIt should be checked that, on account of priority control, the actuator executed the
behaviour configured by the parameters "Behaviour after bus or mains voltage return" and
"Behaviour after an ETS programming operation" on the parameter page "Ax - General"
after bus voltage return and an ETS programming operation. The command values preset
via configuration after a device reset are not influenced by a command value limit. A
command value limit only influences the input command values preset via the bus or
emergency operation command values during command value monitoring.
Page 79 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.8 Status functions
Command value status
A status object can be optionally enabled for each valve output. The status object makes the
active command value of a valve output available either actively transmitting or passively (object
can be read out). During status feedback, the actuator takes all the functions into account which
have an influence on the command value implemented at the output. Depending on the
configured data format of the input command value, the status object will possess the data
formats named below...
- Input command value "Switching (1-bit)":
Data format of status object "1-bit",
- Input command value "Constant (1-byte) with pulse width modulation (PWM)":
Data format of status object "1-byte",
- Input command value "Constant (1-byte) command value limiting value":
Data format of status object "1-bit".
The status objects will assume different status values, depending on the input data formats of
the command values and the state of operation of a valve output.
iThe actuator distinguishes between different functions and events that can have an effect
on the valve outputs. Because these functions and events cannot be executed
simultaneously, there is priority control. Each global or output-orientated function and each
incoming event possesses a priority (see page 35-36). The function or the event with the
higher priority overrides the lower-priority functions and events.
Priority control also influences the status objects. That state is always transmitted as the
status which is currently set at a valve output. If a function with a high priority is exited, then
the status objects assume the command value of functions with a lower priority, providing
that they are active.
Status value for input command value "Switching (1-bit)"...
- State of operation "Normal operation"
-> Status value = Most recently received input command value ("0" or "1"),
- State of operation "Emergency operation" (0...100 %)
-> Status value = Emergency operation command value ("0" at 0 %, "1" at 1...100 %),
- State of operation "Forced position" (0...100 %)
-> Status value = Forced command value ("0" at 0 %, "1" at 1...100 %),
- State of operation "Valve rinsing" (0 %, 100 %)
-> Status value = Current command value in rinsing operation ("0" when valve closed, "1"
when valve opened),
- State of operation "Service mode" (0 %, 100 %)
-> Status value = Service command value ("0" when valve forcibly closed, "1" when valve
forcibly opened),
- State of operation "After device reset" (0...100 %)
-> Status value = According to presetting by parameter "Behaviour after bus or mains
voltage return" or "Behaviour after ETS programming operation" ("0" at 0 %,
"1" at 1...100 %),
- State of operation "Manual operation" (5...100 %)
-> Status value = Manual operation command value ("0" at 0 % CLOSE,
"1" at 5...100 % OPEN),
- State of operation "Valve voltage failure" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0" when
deenergised closed, "1" when deenergised opened),
- State of operation "Short-circuit / overload" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0" when
deenergised closed, "1" when deenergised opened).
Page 80 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
Status value for input command value "Constant (1-byte) with pulse width modulation (PWM)"...
- State of operation "Normal operation" -> Status value = Most recently received input
command value (0...100 %),
- State of operation "Emergency operation" (0...100 %)
-> Status value = Emergency operation command value (0...100 %),
- State of operation "Forced position" (0...100 %)
-> Status value = Forced command value (0...100 %),
- State of operation "Valve rinsing" (0 %, 100 %)
-> Status value = Current command value in rinsing operation ("0 %" when valve closed,
"100 %" when valve opened),
- State of operation "Service mode" (0 %, 100 %)
-> Status value = Service command value ("0 %" when valve forcibly closed, "100 %" when
valve forcibly opened),
- State of operation "After device reset" (0...100 %)
-> Status value = According to presetting by parameter "Behaviour after bus or mains
voltage return" or "Behaviour after ETS programming operation" ("0" at 0 %,
"1" at 1...100 %),
- State of operation "Manual operation" (5...100 %)
-> Status value = Manual operation command value (0 % CLOSE, 5...100 % OPEN),
- State of operation "Valve voltage failure" (0 %, 100 %)
-> Status value = Command value according to valve direction of action (0 % when
deenergised closed, 100 % when deenergised opened),
- State of operation "Short-circuit / overload" (0 %, 100 %)
-> Status value = Command value according to valve direction of action (0 % when
deenergised closed, 100 % when deenergised opened).
Status value for input command value "Constant (1-byte) command value limiting value"...
- State of operation "Normal operation"
-> Status value = According to evaluation of the input command value by limiting value and
hysteresis ("0" for command value < limiting value - hysteresis or "1" for command value >=
limiting value),
- State of operation "Emergency operation" (0...100 %)
-> Status value = Emergency operation command value ("0" at 0 %, "1" at 1...100 %),
- State of operation "Forced position" (0...100 %)
-> Status value = Forced command value ("0" at 0 %, "1" at 1...100 %),
- State of operation "Valve rinsing" (0 %, 100 %)
-> Status value = Current command value in rinsing operation ("0" when valve closed, "1"
when valve opened),
- State of operation "Service mode" (0 %, 100 %)
-> Status value = Service command value ("0" when valve forcibly closed, "1" when valve
forcibly opened),
- State of operation "After device reset" (0...100 %)
-> Status value = According to presetting by parameter "Behaviour after bus or mains
voltage return" or "Behaviour after ETS programming operation" ("0" at 0 %,
"1" at 1...100 %),
- State of operation "Manual operation" (5...100 %)
-> Status value = Manual operation command value ("0" at 0 % CLOSE,
"1" at 5...100 % OPEN),
- State of operation "Valve voltage failure" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0" when
deenergised closed, "1" when deenergised opened),
- State of operation "Short-circuit / overload" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0" when
deenergised closed, "1" when deenergised opened).
Page 81 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
Activating the command value status function
The status feedback is a function of the valve outputs and can be enabled on the parameter
pages "Ax - Command value/Status/Operating mode".
oSet the "Feedback valve command value" parameter to "Yes".
Status feedback is enabled. The status object of the valve output becomes visible in the
ETS.
oSet the parameter to "no".
Status feedback is deactivated. No status object is available.
Setting the type of the command value status function
The status feedback can be used as an active signal object or as a passive status object. As an
active signal object, the feedback is also directly transmitted to the bus whenever there is a
change to the status value. As a passive status object, there is no telegram transmission after a
change. In this case, the object value must be read out. The ETS automatically sets the
communication flags of the status objects required for proper functioning.
The parameter "Type of feedback" exists separately for each valve output on the parameter
page "Ax - Command value/Status/Operating mode".
Status feedback must be enabled.
oSet the parameter to "Active signalling object".
The feedback telegram is transmitted as soon as the status changes. An automatic
telegram transmission of the feedback takes place after bus voltage return, if the supply
voltage of the actuators fails and returns or after an ETS programming operation (possibly
with a delay).
iThe status object does not transmit if the status does not change after the activation or
deactivation of device functions or new input command values. Transmission only ever
takes place after changes to the command value.
oSet the parameter to "Passive status object".
The feedback telegram will only be transmitted in response if the status object is read out
from the bus by a read telegram. No automatic telegram transmission of the feedback
takes place after bus voltage return, if the supply voltage of the actuators fails and returns
or after an ETS programming operation.
Setting the time delay of the command value status feedback
If used as active signal object, the state of the status feedback information is transmitted to the
bus after bus voltage return or after an ETS programming operation. In these cases, feedback
can be time-delayed with the time delay being preset globally for all valve outputs together on
the "General" parameter page.
oSet the parameter "Time delay for feedback after bus voltage return ?" to "yes".
The status feedback will be transmitted with a delay after bus voltage return or after an ETS
programming operation. No feedback is transmitted during a running time delay, even if the
valve state changes during this delay.
oSet the parameter "Time delay for feedback after bus voltage return ?" to "no".
The status feedback will be transmitted immediately after bus voltage return or after an
ETS programming operation.
iIf the supply voltage of the actuators fails and returns, then the status feedback is always
transmitted without a delay, providing that the bus voltage supply is switched on.
Page 82 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
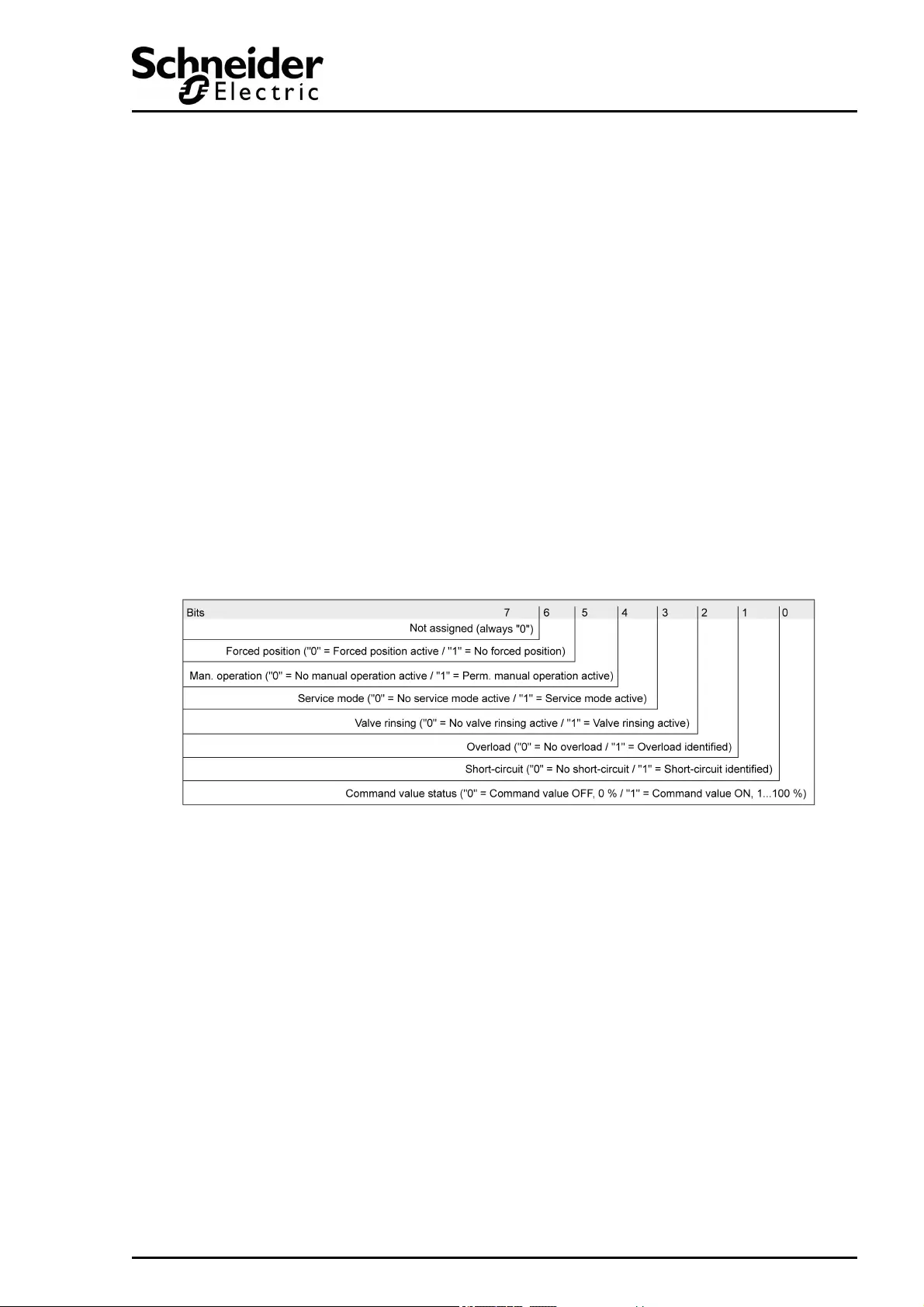
Art. No. MTN6730-0001
Setting cyclical transmission of the command value status feedback
The status feedback telegram can also be transmitted cyclically via the active signal object in
addition to the transmission after changes.
oSet the parameter "Cyclical transmission of feedback telegram?" to "yes".
Cyclical transmission is activated.
oSet the parameter "Cyclical transmission of feedback telegram?" to "no".
Cyclical transmission is deactivated so that the feedback telegram is transmitted to the bus
only when the status is changed by the actuator.
iThe cycle time is defined centrally for all the valve outputs on the parameter page
"General".
iThere is no cyclical transmission during an active time delay after bus voltage return or an
ETS programming operation.
Combined valve status
The combined valve status allows the collective feedback of various functions of a valve output
in a single 1-byte bus telegram. It helps to forward the status information of an output to a
suitable recipient (e.g. KNX visualisation) in a targeted manner, without having to evaluated
various global and channel-orientated feedback and status functions of the actuator. The
communication object "Feedback combined valve status" contains 7 different items of status
information, which are bit-encoded (Figure 19).
Figure 19: Bit encoding of the object "Feedback combined valve status"
The bits of the combined valve status feedback have the meaning given below...
- Bit 0 "Command value status":
The command value status always transmits the command value status currently set at a
valve output. Here, the priority control of the actuator is taken into account. Functions or
events with a higher priority override lower-level functions and events. If a function with a
high priority is exited, then the status information assumes the command value of functions
with a lower priority, providing that they are active.
The active command value is always made available as 1-bit information in the combined
object. Constant command values (PWM at the valve output) are converted into a 1-bit
status (status "0" = Command value 0 % / status "1" = Command value 1...100 %).
- Bit 1 "Short-circuit":
In this status bit, the value "1" forwards the information that the valve output has a short-
circuit. The bit becomes "1" as soon as the actuator has successfully performed the testing
cycle for short-circuit detection. The bit becomes "0" when the short-circuit has been
eliminated and reset.
Page 83 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
- Bit 2 "Overload":
In this status bit, the value "1" forwards the information that the valve output has an
electrical overload. The bit becomes "1" as soon as the actuator has successfully
performed the testing cycle for overload detection. The bit becomes "0" when the overload
has been eliminated and reset.
- Bit 3 "Valve rinsing":
When "1", this bit indicates active valve rinsing (rinsing operation time running). In the "0"
status, no valve rinsing is active.
- Bit 4 "Service mode":
Service mode is a global function of the actuator. Individual valve outputs can be assigned
to service mode. When "1", this bit displays an active service mode. The affected valve
output then sets the command value of the service mode. In this case, the output is
disabled for activation by the bus using input command values. In the "0" status, no service
mode is active.
- Bit 5 "Manual operation":
Manual operation is also a global function of the actuator. The command value of individual
valve outputs can be influenced in the course of a manual operation. When "1", this bit
displays an active permanent manual operation. In the "0" status, no manual operation is
active. In a temporary manual operation, the status in the combined object does not
become "1".
- Bit 6 "Forced position":
When "1", this bit displays an active forced position. In the "0" status, no forced position is
active.
- Bit 7 "Not assigned":
This bit is always "0".
Activating the combined valve status
The combined status feedback is a function of the valve outputs and can be enabled on the
parameter pages "Ax - Command value/Status/Operating mode".
oSet the "Feedback combined valve status ?" parameter to "Yes".
The feedback of the combined valve status is enabled. The 1-byte status object becomes
visible in the ETS.
oSet the parameter to "no".
The feedback of the combined valve status is deactivated. No 1-byte status object is
available.
Setting the type of the combined valve status
The combined valve status can be used as an active signal object or as a passive status object.
As an active signal object, the feedback is also directly transmitted to the bus whenever there is
a change to the status value. As a passive status object, there is no telegram transmission after
a change. In this case, the object value must be read out. The ETS automatically sets the
communication flags of the status objects required for proper functioning.
The parameter "Type of combined status feedback" exists separately for each valve output on
the parameter page "Ax - Command value/Status/Operating mode".
The combined status feedback must be enabled.
oSet the parameter to "Active signalling object".
The feedback telegram is transmitted as soon as the status changes. Automatic telegram
transmission of the feedback takes place after bus voltage return and after an ETS
programming operation (possibly with a time delay).
iThe combined status object does not transmit if the status information does not change
after the activation or deactivation of device functions or new input command values. Only
changes are ever transmitted.
Page 84 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iIf the supply voltage of the actuators fails and returns, then the combined status feedback
is not transmitted.
oSet the parameter to "Passive status object".
The feedback telegram will only be transmitted in response if the status object is read out
from the bus by a read telegram. No automatic telegram transmission of the feedback
takes place after bus voltage return or after programming with the ETS.
Setting the time delay of the combined valve status
If used as active signal object, the state of the combined status feedback information is
transmitted to the bus after bus voltage return or after an ETS programming operation. In these
cases, feedback can be time-delayed with the time delay being preset globally for all valve
outputs together on the "General" parameter page.
oSet the parameter "Time delay for feedback after bus voltage return ?" to "yes".
The combined status feedback will be transmitted with a delay after bus voltage return or
after an ETS programming operation. No feedback is transmitted during a running delay,
even if the status information changes during this delay.
oSet the parameter "Time delay for feedback after bus voltage return ?" to "no".
The combined status feedback will be transmitted immediately after bus voltage return or
after an ETS programming operation.
Setting cyclical transmission of the combined valve status
The feedback telegram of the combined valve status can also be transmitted cyclically via the
active signal object in addition to the transmission after changes.
oSet the parameter "Cyclical transmission of feedback telegram?" to "yes".
Cyclical transmission is activated.
oSet the parameter "Cyclical transmission of feedback telegram?" to "no".
Cyclical transmission is deactivated so that the feedback telegram is transmitted to the bus
only when the status is changed by the actuator.
iThe cycle time is defined centrally for all the valve outputs on the parameter page
"General".
iThere is no cyclical transmission during an active time delay after bus voltage return or an
ETS programming operation.
Page 85 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.9 Short-circuit and overload detection
The actuator is able to detect an electrical overload or a short-circuit at the valve outputs and to
protect them against destruction by switching off. Outputs which have experienced a short-
circuit or a constant load are deactivated after an identification period. Optionally, in this case
short-circuit/overload signals can be transmitted via separate 1-bit communication objects.
Short-circuit / overload detection is always active when a valve output is switched on (output
energised) and always occurs in two output groups. Here, outputs 1 to 3 and outputs 4 to 6
each form a group. If there is an error, the actuator will only detect an overload / a short-circuit
in a group at first. Therefore, the actuator then executes a special testing cycle, which
guarantees safe detection of the valve outputs which are actually electrically overloaded. Only
after overloaded or short-circuited valve outputs have been accurately determined is it possible
to output overload/short-circuit signals to the bus. After error detection in a group, all the outputs
in this group are immediately deactivated for 6 minutes (switch-off idle phase / outputs not
energised). During this time, the error detection circuit resets thermally.
The status LEDs ŋO1-O3 or ŋO4-O6 on the front panel of the device flash slowly during the
time of an overload or short-circuit identification (1 Hz) to signalise that the output groups are
temporarily deactivated. The LEDs flash quickly when the actuator has safely identified all or
individual valve outputs of the affected group as overloaded or having short-circuited.
Testing cycle
During the testing cycle, the actuator applies stepped, time-offset switch-on and deactivation of
each valve output of the affected group to determine the outputs which are overloaded or
shorted and which thus led to the error switch-off. In the case of a weak overload at, for
example, one valve output, it may occur during the testing cycle that, during the individual
testing of the output during the switch-on phase, no overload is detected, as the overload is too
slight. This means that it may be necessary to start multiple testing cycles, until the overloaded
output can be identified clearly. Each output group is equipped with a counter, which saves the
number of testing cycles started for a group up to that point. Each time it is not possible to
determine clearly if a valve output is overloaded or short-circuited during a testing cycle, then
the counter will counter upwards by one increment. If another error is detected in an output
group unsuccessfully tested for overload / short-circuit (current counter status > "0"), then the
outputs will be energised with a longer switch-on time in the new testing cycle. In the first testing
cycle, the switch-on time is 1 second, in the 2nd cycle 10 seconds, in the 3rd cycle 1 minute
and, in the 4th cycle, 4 minutes.
The current counter status is only saved in the device and cannot be read out.
If there is a collective overload, various weak overloads, possibly at multiple outputs, have
collected into a stronger overall overload. If there is a collective overload, it may occur that,
even after four testing cycles, no output can be clearly identified as overloaded. In this case,
after the fourth cycle, the actuator will deactivate individual valve outputs of an output group,
until no overload exists.
Here is the testing cycle for the identification of overloaded or short-circuited valve outputs in
detail...
- 1.
An overload or short-circuit was detected in a group. The actuator deactivates all the valve
outputs of the affected group. The switch-off idle phase (6 minutes) is started.
- 2.
The first valve output of the affected group (output 1 or output 4) switches on for approx. 1
second, if this output was not previously deactivated by a previous testing cycle. If the
output was previously deactivated, then the actuator switches the next output on (output 2
or output 4, etc.).
Page 86 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
- 2. a
If, during the switch-on time, no overload or no short-circuit is detected because the
overload / the short-circuit is pending at another output or is too slight (weak overload),
then the output will be switched off again. Continue with Step 3.
- 2. b
If, at the tested valve output, an overload or a short-circuit is detected, then a forced switch-
off takes place immediately at this output. The output is deactivated. Then a switch-off idle
phase of 6 minutes is started, during which the error detection circuit resets thermally.
During this time, the affected output group remains completely switched off.
- 3.
The output test started under Step 2 is continued with the next output, which has not been
deactivated, in the appropriate group in the same fashion, with a time gap of approx. 4
seconds from output test to output test, until the last valve output of the group or both
groups has been processed.
- 4.
The testing cycle is then finally exited when all the valve outputs or both groups have been
processed.
- 4. a
The valve outputs detected as overloaded or having shorted in the testing cycle of the
group(s) now remain deactivated and cannot be switched on again until the reset. The
testing cycle counter is deleted. All the unaffected valve outputs are again activated
normally.
- 4. b
If, during the testing cycle, no output was detected as being overloaded or having shorted
(probable weaker overload), then the testing cycle counter for this/these group(s) will count
upwards, so that, in the next cycle, all the affected valve outputs are tested with an
extended switch-on time, in order to detect weaker overloads.
Exception: If the previously executed testing operation was the 4th sequence in succession
without any error detection, then the actuator will assume that this is a collective overload
at multiple outputs. In this case, the actuator will automatically deactivate one output of the
affected group (output 3 or output 6), according to the priority. In so doing, the testing cycle
counter will be deleted as for regular identification of an error, and testing again occurs with
a 1 s switch-on time in the next cycle. If 4 cycles again occur after this, without outputs
being detected as overloaded or having shorted during the individual test, then the actuator
will again assume a collective overload and will automatically permanently deactivate the
next outputs of the group(s) (firstly output 2 and/or output 5, then, after four more cycles,
output 1 and/or output 4).
- 5.
All the valve outputs not deactivated in the testing cycles then continue to work normally.
iIf possible, connect actuators for environments with increased fail-safety requirements to
the outputs 1 and 4. During overload detection, these are switched off last, as described.
iSignal telegrams, if configured for a valve output in the ETS, are only generated for those
valve outputs which were forcibly deactivated by priority in the testing cycle, after the
detection of an error or a collective overload.
iThe resetting of an overload or a short-circuit during a testing cycle is ignored.
Page 87 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
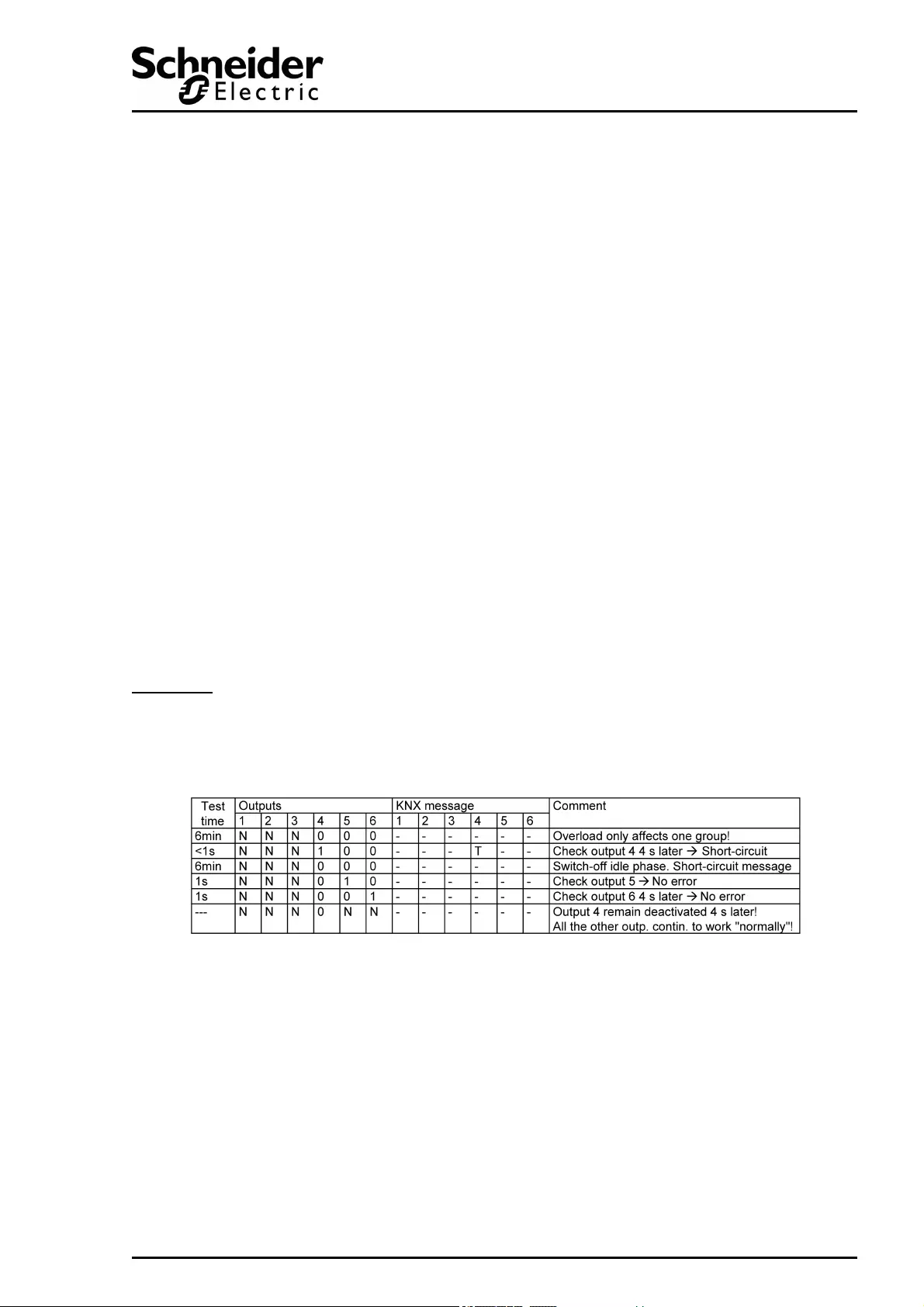
Art. No. MTN6730-0001
iTo give less weight to detected overloads caused by rare, extreme interference, such as
strong electromagnetic coupling into the low-voltage network (lightning strike close by), the
cycle counter is reduced by 1 after a period of 28 days without the detection of a further
overload or a new short-circuit. This ensures that, after long periods of time, valve outputs
are not simply switched off after the 4th cycle without identification of a clear overload or a
short circuit.
iA valve output switched off via the bus (output not energised) can also be energised during
the overload or short-circuit detection phase for the period of time defined in the testing
cycle.
A short circuit or an overload influences the command value status of the valve outputs of an
output group. Even at the beginning of a short-circuit / overload identification phase, the
actuator will set the command value status, according to the valve direction of action, either to
"OFF" / "0 %" (for deenergised closed) or to "ON" / "100 %" (for deenergised opened). This
valve status remains intact during the entire length of the identification phase and for valve
outputs identified as having short circuited or being overloaded. Energisation phases during the
testing cycles do not influence the command value status.
iThe command value status contained in the combined valve status is not influenced by a
short-circuit or an overload.
iA valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influence the
evaluation of the calculation of the "Largest command value" or the heat requirement and
pump control.
Examples of overload / short-circuit detection...
Example 1
Error case = Short-circuit at valve output 4.
A short-circuit generates a short-circuit/overload signal in output group A4...A6. This produces
the following sequence...
Figure 20: Short-circuit at valve output 4
"0" Output not energised
"1" Output energised
"N" Normal operation of the valve output
"T" Short-circuit / overload identified (signal telegram is cancelled if configured)
On next error detection in group 4-6: Test switch-on time: 10 s
Page 88 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
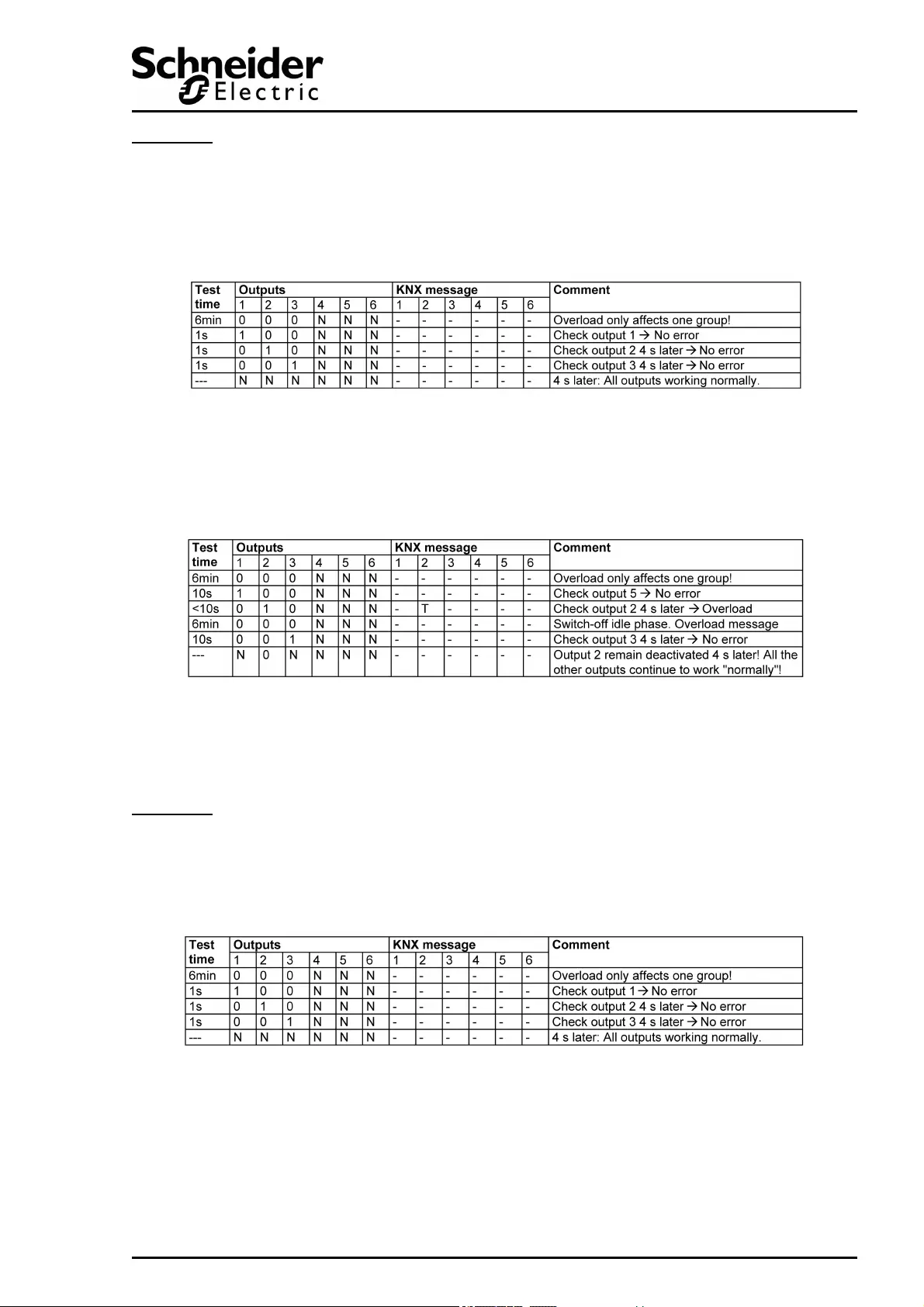
Art. No. MTN6730-0001
Example 2
Error case = Weak overload at valve output 2.
The overload is so weak that a switch-on time of 1 second does not lead to error detection. In
the case of a weak overload, it should be expected that the overload/short-circuit signal only
affects the directly affected output group (here: Outputs 1 to 3). This produces the following
sequence...
Figure 21: Weak overload at valve output 2 / first testing cycle
On next error detection in group 1...3: Test switch-on time: 10 s
It should be expected that, in normal operation, an overload will again be detected in the
previously affected output group...
Figure 22: Weak overload at valve output 2 / second testing cycle
On next error detection in group 1...3: Test switch-on time: 1 s
Example 3
Error = Total overload in output group "Output 1 to 3".
The overload of individual valve outputs is so weak that, during the testing cycles, no output can
be clearly identified as overloaded or having shorted during a test switch-on time of 4 minutes.
This produces the following sequence...
Figure 23: Total overload in output group 1...3 / first testing cycle
On next error detection in group 1...3: Test switch-on time: 10 s
It should be expected that, in normal operation, an overload will again be detected in the
previously affected output group...
Page 89 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
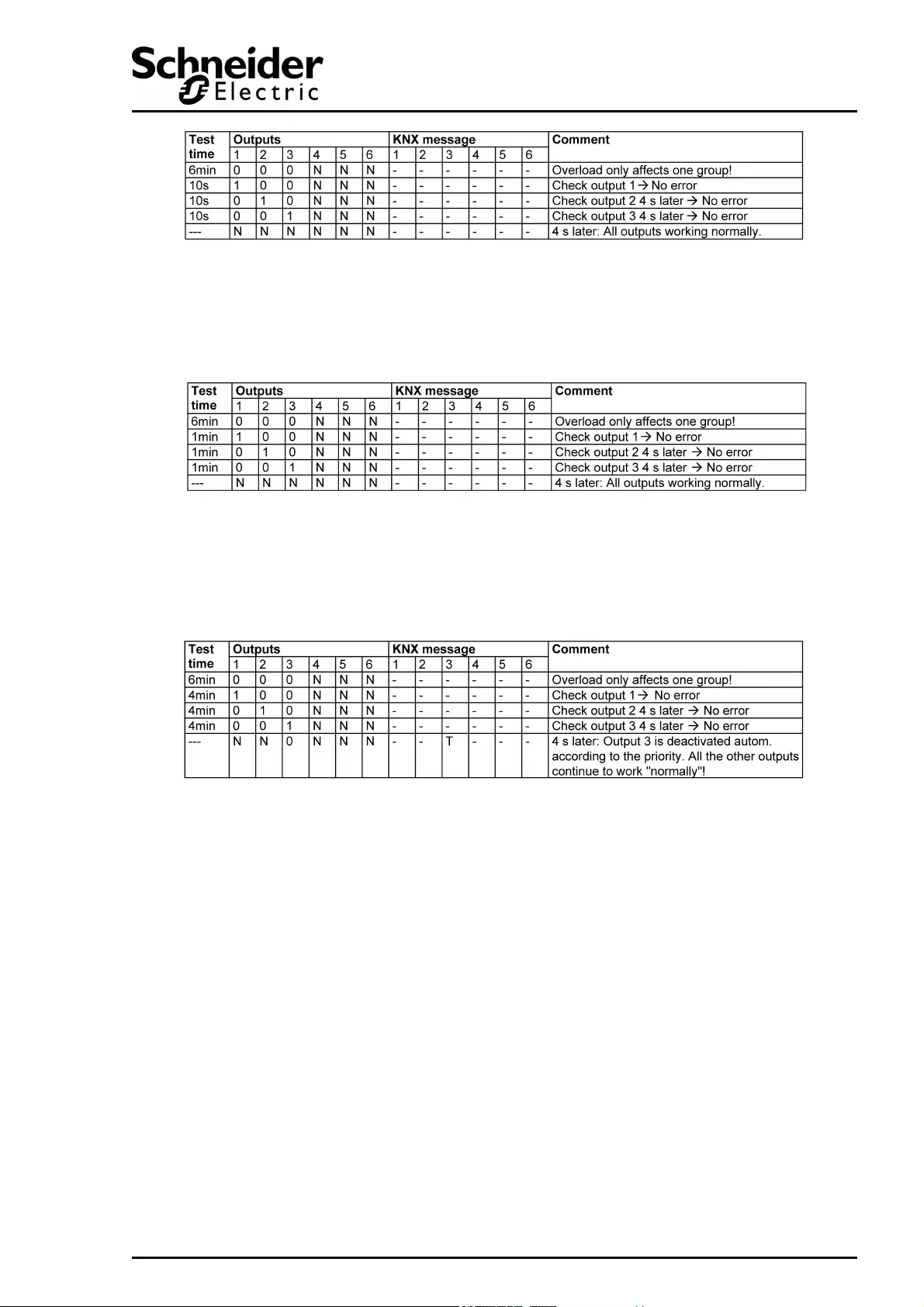
Art. No. MTN6730-0001
Figure 24: Total overload in output group 1...3 / second testing cycle
On next error detection in group 1...3: Test switch-on time: 1 min.
It should be expected that, in normal operation, an overload will again be detected in the
previously affected output group...
Figure 25: Total overload in output group 1...3 / third testing cycle
On next error detection in group 1...3: Test switch-on time: 4 min.
It should be expected that, in normal operation, an overload will again be detected in the
previously affected output group...
Figure 26: Total overload in output group 1...3 / fourth testing cycle
On next error detection in group 1-3: Test switch-on time: 1 s
Short-circuit / overload signal telegrams
Signal telegrams, are only transmitted for the outputs which were deactivated by priority in the
testing cycle, after the detection of an error or a collective overload. The precondition is that the
signal telegram on the parameter page "Ax - Command value/Status/Operating mode" is
enabled by the "Short-circuit / overload signal ?" parameter in the "Yes" setting. The telegram
polarity of the signal telegram can be configured.
An active short-circuit / overload signal remains intact after a device reset by bus voltage return.
In this case as well, the short-circuit / overload signal must first be reset (see "Resetting a short-
circuit / overload" below). If, before the bus/mains voltage failure, no short-circuit and no
overload was identified, then the actuator will first transmit a signal telegram "No short-circuit /
no overload" after bus voltage return. Should, after bus/mains voltage return, a short-circuit or
an overload occur, then the actuator will start a new identification phase.
After an ETS programming operation, short-circuit / overload signals are always deactivated.
Here, in the case of shorted or overloaded valve outputs, the actuator will first perform an
identification phase again, in order to detect faulty valve outputs.
Page 90 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iThe object always transmits the current status after bus voltage return and an ETS
programming operation after a delay, providing that a delay after bus voltage return has
been configured on the "General" parameter page.
iThe states "Short-circuit" and "Overload" are also fed back in the combined valve status
(see page 83-84).
Resetting a short-circuit / overload
Valve outputs, identified as having shorted or being overloaded, are detected by the actuator. In
this case, affected valve outputs can no longer be activated by any functions of the actuator.
The cause of the error must be eliminated and the "Short-circuit / overload" state also be reset,
so that the outputs can be activated again.
There are two alternative options for the recommissioning of one or more deactivated valve
outputs...
- Global reset of all overload / short-circuit states:
All the overload / short-circuit states of the actuator can be reset jointly. For this, the 1-bit
communication object "Reset short-circuit / overload" is available, which can be enabled on
the parameter page "Valve / pump", using the "Global reset of all 'Short-circuit / overload'
signals" parameter in the "Yes" setting. As soon as the actuator receives a "1" telegram via
this object, all the overload / short-circuit states will be reset immediately. The actuator then
deactivates the overload / short-circuit state of each valve output and also retracts the
overload / short-circuit signals. Should all or some of the valve outputs still be shorted or
overloaded at this time, then a new identification phase will begin.
A "0" telegram to the "Reset short-circuit / overload" object produces no reaction.
iThe global resetting of an overload or a short-circuit during a testing cycle is always
ignored.
- Resetting by switching off the valve voltage supply:
Overload / short-circuit states can be reset by switching off the valve voltage supply. The
following procedure is required for this:
a) Switch-off of the valve voltage supply. After this, the actuator immediately sends a signal
telegram "Failure of operating voltage", provided that this function is globally enabled in the
ETS and the bus voltage is still switched on. In addition, all the overload / short-circuit
signals of the valve outputs are reset immediately. If, at this time, no bus voltage is
switched on, then the actuator will reset the overload / short-circuit signals after the bus
voltage is switched on again.
b) Elimination of the cause of the overload / short-circuit
c) Switch-on of the valve voltage supply. The valves can then be activated again normally.
When the valve voltage supply is switched on, the actuator also retracts the "Failure of
operating voltage" signal, provided that this function is globally enabled in the ETS.
d) Should all or some of the valve outputs still be shorted or overloaded after the return of
the valve voltage supply, then a new identification phase will begin.
iSwitching off the valve voltage during a testing cycle only causes a reset of existing
overload / short-circuit signals. The testing cycle is not cancelled.
Page 91 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.2.10 Valve rinsing
To prevent calcification or sticking of a valve which has not been activated for some time, the
actuator has an automatic valve rinsing function. Valve rinsing can be executed cyclically or
using a bus command, causing the activated valves to run through the full valve stroke for a
preset period of time. During valve rinsing, the actuator activates a command value of 100 %
without interruption for the affected valve output for half of the configured "Valve rinsing time".
For this, the valves open completely. After half the time, the actuator switches to a command
value of 0%, causing the connected valves to close completely.
If necessary, the intelligent valve rinsing can be enabled. In so doing, cyclical rinsing using the
full stroke is only executed when a defined minimum command value limiting value was not
exceeded during actuator operation.
iDuring valve rinsing, the actuator executes the command values "1" (corresponds to "100
%" - open completely) and "0" (corresponds to "0 %" - close completely) for valve outputs
configured with a command value limiting value for the data formats "Switching (1-bit)" or
"Constant (1-byte)".
iThe actuator takes the valve direction of action configured in the ETS into account in the
electrical activation of the valve output.
At the end of valve rinsing, the actuator automatic sets the tracked command value according to
the priority control (see page 35-36).
iThe actuator does not execute valve rinsing if a higher-priority function is active.
Nonetheless, the actuator internally starts the rinse length, as soon as the device receives
a command for valve rinsing (cyclically or via bus command). If, during an active rinsing
time, higher-priority functions are exited, then the actuator will execute the remaining
residual time of the rinse function. If the rinsing time continuous to elapse during a function
with a higher priority, then there is no residual time. Thus, the actuator will not execute the
previously started valve rinsing.
iIf the bus control of individual valve outputs is disabled as part of a permanent manual
operation, then the actuator will save the start commands of a valve rinsing operation in the
background. In this case, the actuator will start the rinse time immediately after the lifting of
the disabling function. If, after this, the manual operation is exited after the rinse time has
started (and no other higher-priority functions are active), then the actuator will also
execute valve rinsing actively.
iThe actuator also executes valve rinsing by starting the rinse time, even if the valve power
supply has been switched off. A bus voltage failure immediately interrupts an active rinsing
operation. When the bus/mains voltage returns, a previously interrupted rinsing operation is
not executed again.
iValve rinsing influences the status feedback of the active command value.
Valve rinsing possesses a separate 1-bit status object. Optionally, this object can be used, for
example, to display a KNX visualisation that valve rinsing is taking place (rinse operation time
running). The status telegram can be used, for example, to disable a KNX room temperature
controller for the length of the valve rinsing. Particularly in the case of long rinsing times, the
disabling of the room temperature controller, possibly in combination with the disabling of the
controller operation, can make a positive contribution to the suppression of the oscillation
behaviour of the controller.
The telegram polarity of the status object is fixed: "0" = Valve rinsing inactive, "1" = Valve rinsing
active.
iThe object transmits the current status after bus and mains voltage return and after an ETS
programming operation without a delay.
Enabling valve rinsing
Valve rinsing can only be used if it has been enabled in the ETS.
Page 92 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
oSet the "Use 'Valve rinsing' function ?" parameter on the parameter page "Ax - Valve
rinsing" to "Yes". In the "Valve rinsing time" parameter, configure for how long the rinse
function (100 % -> 0 %) is to be executed.
Valve rinsing is enabled. Additional parameters become visible in the ETS, presetting
whether the valve rinsing is to be activated cyclically and / or with bus control.
iSet the length of the valve rinsing to the adjustment cycle time of the electrothermal
actuators in such a way that they open and close completely. This is usually guaranteed by
configuring the rinsing length to double the adjustment cycle time.
oSet the "Use 'Valve rinsing' function ?" parameter to "no".
Valve rinsing is not available.
Configuring cyclical valve rinsing
The actuator can perform valve rinsing cyclically, if necessary. When using the cyclical valve
rinsing, a rinse operation can be started automatically after a configurable cycle time
(1...26 weeks). Here too, the valve rinsing length configured in the ETS defines the time for the
once-only, complete opening and closing of the activated valve drives. At the end of a rinsing
operation, the actuator always restarts the cycle time.
Valve rinsing must be enabled and a valid rinsing time configured.
oSet the "Activate cyclical valve rinsing ?" parameter to "yes". In the case of the "Cycle time"
parameter, configure how often valve rinsing is to be performed automatically.
Cyclical valve rinsing is enabled.
oSet the "Activate cyclical valve rinsing ?" parameter to "no".
Cyclical valve rinsing is completely disabled. Valve rinsing can only be started by the
communication object (if enabled).
iEach ETS programming operation resets the cycle time. The first rinsing operation with
cyclical valve rinsing takes place after an ETS programming operation after the first time
cycle has elapsed.
If there is a bus voltage failure, the actuator saves the remaining residual time of the
current time cycle. The residual cycle time is restarted after bus voltage return.
A bus voltage failure immediately interrupts an active rinsing operation. When the
bus/mains voltage returns, a previously interrupted rinsing operation is not executed again.
The actuator then starts a new time cycle for cyclical valve rinsing.
Optionally, intelligent cyclical valve rinsing can be additionally activated. Here, valve rinsing is
only executed repeatedly, if, in the current time cycle, a minimum command value limiting value,
configurable in the ETS, was not exceeded. It the active command value exceeds the limiting
value, then the actuator will stop the cycle time. The actuator only restarts the cycle time if, in
the further course of the command value change, a command value of "0 %" or "OFF"
(completely closed) is set (Figure 27). This prevents valve rinsing if the valve has already run
through a sufficiently defined stroke.
If, after exceeding the configured limiting value, the value was not completely closed at least
once (command value "0 %" or "OFF"), then no further cyclical valve rinsing will take place.
Use of the intelligent cyclical valve rinsing means that rinsing operations over the entire valve
stroke are only then used when this is sensible and actually required. For example, in the
summer months, the use of heating power is lower. In consequence, the valves are activated
less frequently by command values, meaning that valve rinsing should be performed as anti-
sticking protection. In the winter months, it is frequent necessary to activate heating valves
using normal command value telegrams.
The intelligent valve rinsing ensures that no redundant valve rinsing is not performed in the
winter. In the summer, the intelligent control performs valve rinsing cyclically.
iThe cycle time is always started after an ETS programming operation. This also occurs
when the active command value exceeds the configured limiting value after the download.
Page 93 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
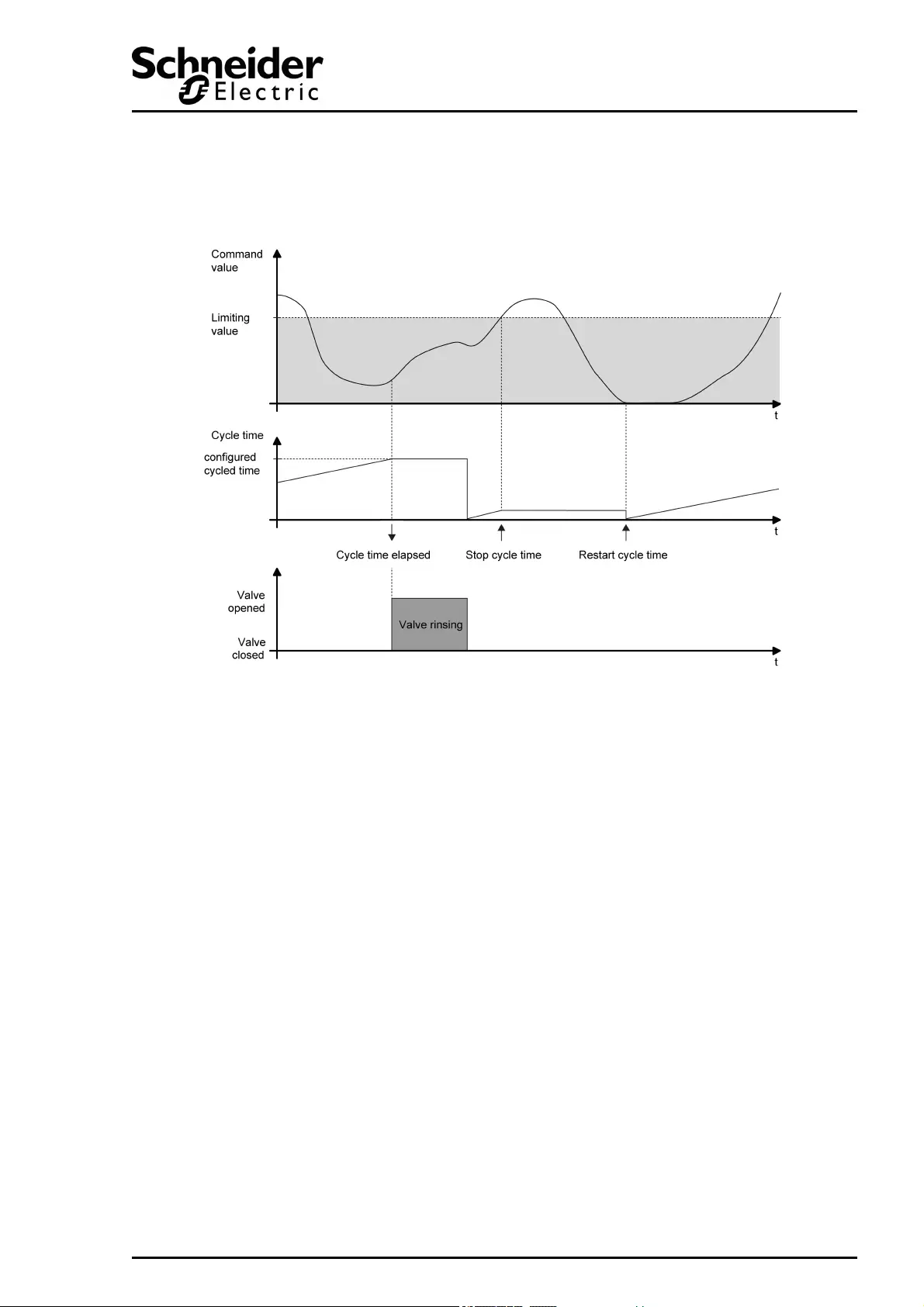
Art. No. MTN6730-0001
iThe combination of intelligent valve rinsing with a command value limit with a minimum
command value limiting value. If a minimum limiting value of the command value limit
exists, then the active command value of the affected valve output is never "0 %". In
consequence, the actuator would never restart the cycle time as part of intelligent valve
rinsing.
Figure 27: Example of a minimum command value limiting value for intelligent valve rinsing
oSet the "Use intelligent valve rinsing ?" parameter to "yes". Using the "Limiting value
minimum command value (10...100 %)" parameter, define the command value limiting
value.
Intelligent cyclical valve rinsing is activated. Valve rinsing is only executed when the
configured limiting value was exceeded at least once in the previous time cycle and,
consequently, the valve was run to the "0 %" command value.
oSet the "Use intelligent valve rinsing ?" parameter to "no".
Intelligent cyclical valve rinsing is deactivated. Valve rinsing always takes place as soon as
the set cycle time has expired.
iValve rinsing can optionally be started and, if required, stopped using a communication
object. If valve rinsing was started by the object, then the actuator will stop the cycle time of
the cyclical valve rinsing operation. The cycle time is only restarted after the rinsing
operation has been fully executed without interruption or a stop command was received via
the object.
Configuring bus-controlled valve rinsing via an object
If necessary, valve rinsing can be started and, optionally, stopped using its own 1-bit
communication object. This means that it is possible to activate a rinsing operation of the valve
controlled by time or an event. It is also possible, for example, to cascade multiple heating
actuators, so that they perform valve rinsing simultaneously (link of the individual status objects
to the input objects of the valve rinsing).
Bus control can only be used if it has been enabled in the ETS.
Page 94 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
Valve rinsing must be enabled and a valid rinsing time configured.
oSet the "Valve rinsing activated externally ?" parameter to "yes". In the case of the
parameter "Polarity of 'Start / stop valve rinsing' object", configure the telegram polarity,
thus presetting whether the bus-controlled starting and stopping, or, alternatively, only
starting, should be possible.
Bus-controlled valve rinsing is enabled. The communication object is visible. The name of
the object is aligned to the setting of the permitted telegram polarity ("Start / stop valve
rinsing" or "Start valve rinsing"). When a start command is received, the actuator
immediately starts the configured time for a rinsing operation. The actuator also actively
executes valve rinsing if no higher-priority function is active. If bus-controlled stopping is
permitted, then the actuator will also react to stop commands by immediately interrupting
running rinsing operations.
oSet the "Valve rinsing activated externally ?" parameter to "no".
Bus-controlled valve rinsing is not available. Valve rinsing can only take place cyclically.
iUpdates of the object from "Start" to "Start" or "Stop" to "Stop" do not produce a reaction.
The length of an elapsing valve rinsing operation or the cycle time of a cyclical valve rinsing
operation are not restarted by this.
iBus-controlled valve rinsing via the object can be combined with a cyclical valve rinsing
operation. If valve rinsing was started by the object, then the actuator will stop the cycle
time of the cyclical valve rinsing operation. The cycle time is only restarted after the rinsing
operation has been fully executed without interruption or a stop command was received via
the object.
Page 95 of 134
Software "Switch PWM 2068 / 1.0"
Functional description
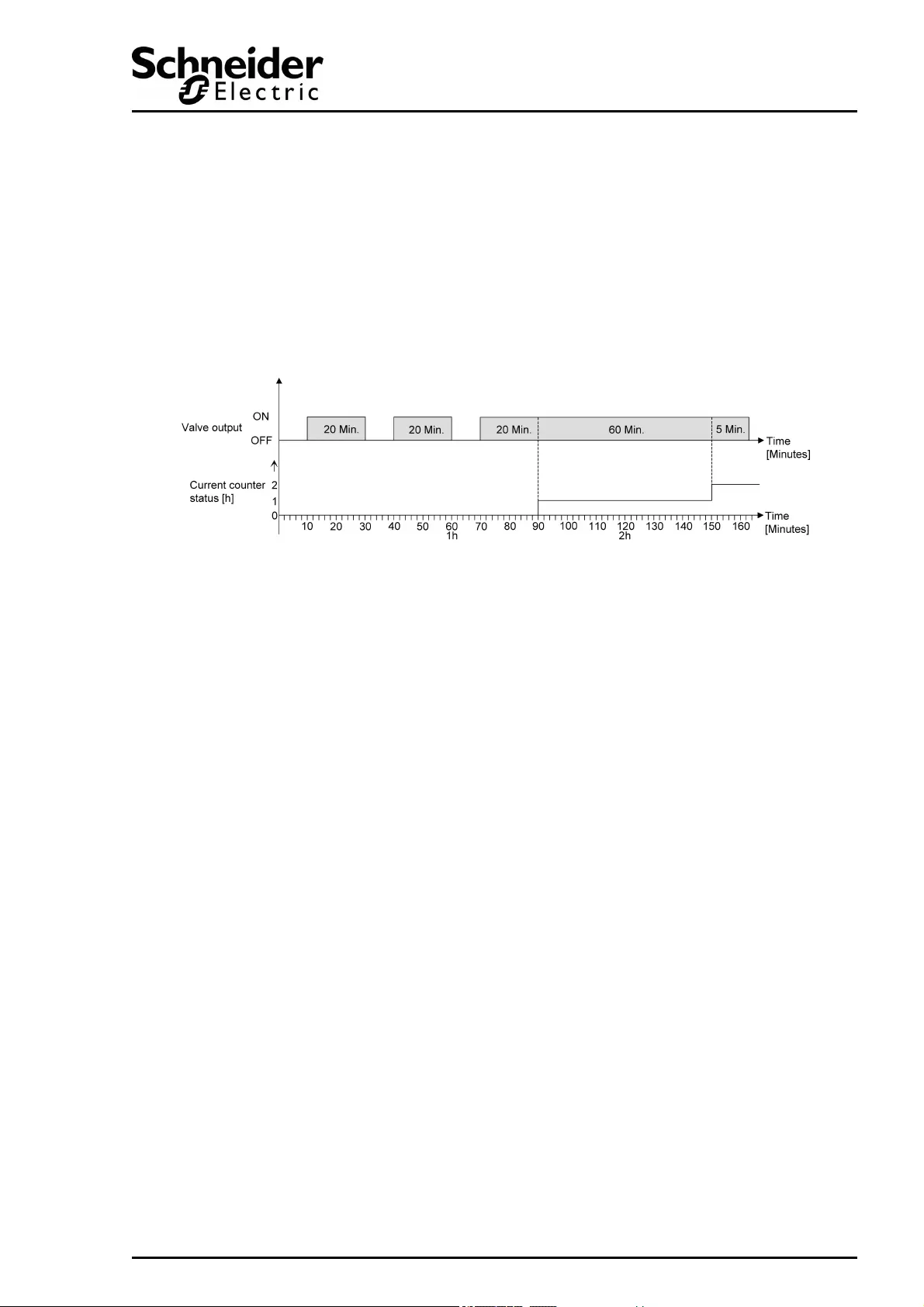
Art. No. MTN6730-0001
4.2.4.2.11 Operating hours counter
The operating hours counter determines the switch-on time of a valve output. For the operating
hours counter, an output is actively on, when it is energised, i.e. when the status LED on the
front panel of the device. As a result, the operating hours counter determines the time during
which deenergised closed valves are opened or deenergised opened valves are closed.
The operating hours counter adds up the determined switch-on time accurately to the minute for
energised valve outputs in full hours respectively (Figure 28). The totalled operating hours are
added in a 2-byte counter and stored permanently in the device. The current counter status can
be transmitted cyclically to the bus by the "value operating hours counter" communication object
or when there is a change in an interval value.
iDuring pulse width modulation (PWM) at a valve output, the operating hours counter only
evaluates the switch-on time of the PWM signal.
Figure 28: Function of the operating hours counter (using the example of an up-counter)
In the as-delivered state, the operating hour values of all valve outputs of the actuator is "0". If
the operating hours counter is not enabled in the configuration of an output, no operating hours
will be counted for the valve concerned. Once the operating hours counter is enabled, however,
the operating hours will be determined and added up by the ETS immediately after
commissioning the actuator.
If the operating hours counter is subsequently disabled again in the parameters and the
actuator is programmed with this disabling function, all the operating hours previously counted
for the valve output concerned will be deleted. When enabled again, the counter status of the
operating hours counter is always on "0".
The operating hours values (full hours) stored in the device will not be lost in case of a bus and
mains voltage failure or by an ETS programming operation. Any summed up operating minutes
(full hour not yet reached) will be rejected in this case, however.
After bus voltage return or after an ETS download, the actuator passively updates the "Value
operating hours counter" communication object in each valve output. The object value can be
read out if the read-flag is set. The object value, depending on the configuration for the
automatic transmission, is actively transmitted if necessary to the bus, once the configured
transmission delay has elapsed after bus voltage return.
The operating hours counter detects any operation of the valve outputs by the manual
operation, which means that switching on an output also activates the counting of operating
hours and the manual switch-off interrupts a counting operation.
No operating hours are counted if the supply voltage of the valves is not switched on.
iIf only the mains voltage supply of the actuator and the valve voltage are switched on (bus
voltage switched off / construction site mode), summed-up operating hours will not be
stored in the event of a mains voltage failure!
Activating the operating hours counter
The operating hours counter only counts the operating hours of a valve output if it was activated
in the ETS.
Page 96 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
oOn the parameter page "Ax - Operating hours counter", set the "Use operating hours
counter ?" parameter to "yes".
The operating hours counter is activated.
oOn the parameter page "Ax - Operating hours counter", set the "Use operating hours
counter ?" parameter to "no".
The operating hours counter is deactivated.
iDeactivation of the operating hours counter and subsequent programming with the ETS
resets the counter status to "0".
Setting type of counter of the operating hours counter
The operating hours counter can optionally be configured as an up-counter or down-counter.
Depending on this type of counter, a limit or start value can be set optionally, whereby, for
example, the operating time of an actuator can be monitored by restricting the counter range.
Up-counter:
After activating the operating hours counter by enabling in the ETS or by restarting, the
operating hours are counted starting at "0". A maximum of 65535 hours can be counted, after
that the counter stops and signals a counter operation via the "Operating hours count. elapsed"
object.
A limiting value can be set optionally in the ETS or can be predefined via the communication
object "Limiting value operating hours counter". In this case, the counter operation is signalled
to the bus via the "Operating hours count. elapsed" object if the limiting value is reached, but the
counter continues counting - if it is not restarted - up to the maximum value 65535 and then
stops. Only a restart initiates a new counting operation.
Down-counter:
After enabling the operating hours counter in the ETS, the counter status is on "0" and the
actuator signals a counter operation for the valve output concerned after the programming
operation or after bus voltage return via the "Operating hours count. elapsed" object. Only after
a restart is the down-counter set to the maximum value 65535 the counting operation started.
A start value can be set optionally in the ETS or can be predefined via the communication object
"start value operating hours counter". If a start value is set, the down-counter is initialised with
this value instead of the maximum value after a restart. The counter then counts the start value
downwards by the hour. When the down-counter reaches the value "0", the counter operation is
signalled to the bus via the "Operating hours count. elapsed" and the counting is stopped. Only
a restart initiates a new counting operation.
The use of the operating hours counter must be set on the parameter page "Ax – Operating
hours counter".
oSet the parameter "Counter type" to "Up-counter". Set the parameter "Limiting value
specification?" to "yes, as parameter" or "yes, as received via object" if it is necessary to
monitor the limiting value. Otherwise, reset the parameter to "no". In the "yes, as specified
in parameter" setting, specify the required limit value (1…65535 h).
The counter counts the operating hours forwards starting from "0". If the monitoring of the
limiting value is activated, the actuator transmits a "1" telegram via the object "Operating
hours count. elapsed" for the valve output concerned once the predefined limiting value is
reached. Otherwise, the counter operation is first transmitted when the maximum value
65535 is reached.
oSet the parameter "Counter type" to "Down-counter". Set the parameter "start value preset
?" to "yes, as parameter" or "yes, as received via object" if a start value preset is
necessary. Otherwise, reset the parameter to "no". In the "yes, as specified in parameter"
setting, specify the required start value (1…65535 h).
The counter counts the operating hours down to "0" after a restart. With a start value
preset, the start value is counted down, otherwise the counting operation starts at the
maximum value 65535. The actuator transmits a "1" telegram via the object "Operating
hours count. elapsed" for the valve output concerned once the value "0" is reached.
Page 97 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
iThe value of the communication object "Operating hours count. elapsed" is stored
permanently. The object is initialised immediately with the value that was saved before bus
voltage return or ETS programming. If an operating hours counter is in this case identified
as having elapsed, i.e. if the object value is a "1", an additional telegram will be actively
transmitted to the bus. If the counter has not yet elapsed (object value "0"), no telegram is
transmitted on return of bus/mains voltage or after an ETS programming operation.
iWith a limiting or start value preset via object: The values received via the object are first
validly accepted and permanently saved internally after a restart of the operating hours
counter. The object is initialised immediately with the value that was last saved before bus
voltage return or ETS programming. The values received will be lost in the case of a bus
voltage failure or by an ETS download if no counter restart was executed before. For this
reason, when specifying a new start or limiting value it is advisable to always execute a
counter restart afterwards as well.
A standard value of 65535 is predefined provided that no limiting value or start value has
been received yet via the object. The values received and stored via the object are reset to
the standard value if the operating hours counter is disabled in the parameters of the ETS
and a ETS download is being performed.
iWith a limiting or start value predefined via object: If the start or limiting value is predefined
with "0", the actuator will ignore a counter restart to avoid an undesired reset
(e.g. in site operation -> hours already counted by manual operation).
iIf the counter direction of an operating hours counter is reversed by reconfiguration in the
ETS, a restart of the counter should always be performed after programming the actuator
so that the counter is reinitialised.
Restarting the operating hours counter
The current counter status of the operating hours can be reset at any time by the
communication object "Reset operating hours counter". The polarity of the reset telegram is
predefined: "1" = Restart / "0" = No reaction.
oCharacterise the communication object "Reset operating hours counter" with "1".
In the up-counter the counter is initialised with the value "0" after a restart and in the down-
counter initialised with the start value. If no start value was configured or predefined by the
object, the start value is preset to 65535.
During every counter restart, the initialised counter status is transmitted actively to the bus.
After a restart, the signal of a counter operation is also reset. At the same time, a "0"
telegram is transmitted to the bus via the object "Operating hours count. elapsed
In addition, the limiting or start value is initialised.
iIf a new limiting or start value was predefined via the communication object, a counter
restart should always be performed afterwards, too. Otherwise, the values received will be
lost in the case of a bus voltage failure or by an ETS download.
iIf a start or limiting value is predefined with "0", there are different behaviours after a
restart, depending on the principle of the value definition...
Preset as parameter:
The counter elapses immediately after a counter restart.
Preset via object:
A counter restart will be ignored to avoid an undesired reset (e.g. after installation of the
devices with hours already being counted by manual operation). A limiting or start value
greater than "0" must be predefined in order to perform the restart.
Transmission behaviour of the operating hours counter
The current value of the operating hours counter is always tracked in the communication object
"value operating hours counter". After bus voltage return or after an ETS download, the actuator
passively updates the "Value operating hours counter" communication object in each valve
Page 98 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
output. The object value can be read out if the read-flag is set.
In addition, the transmission behaviour of this communication object can be set.
The use of the operating hours counter must be set on the parameter page "Ax – Operating
hours counter".
oSet the parameter "Automatic transmission of numeric value" on parameter page "Ax -
Operating hours counter" to "After change by interval value". Set the "Counting value
interval (1…65535 h)" to the desired value.
The counter status is transmitted to the bus as soon as it changes by the predefined
counting value interval. After bus and mains voltage return or after programming in the
ETS, the object value is transmitted automatically and immediately if the current counter
status or a multiple of this corresponds to the counting value interval. A counter status "0" is
always transmitted in this case.
The object value is not transmitted if there is solely bus voltage return (mains voltage
supply of the actuator available without interruption).
oSet the parameter "Automatic transmission of counting value" to "Cyclical".
The counter value is transmitted cyclically. The cycle time is defined on the parameter page
"General". After bus and mains voltage return or an ETS programming operation, the
counter status is transmitted to the bus after the configured cycle time has elapsed.
Page 99 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.4.3 Delivery state
In the as-delivered state, the actuator is passive, i.e. no telegrams are transmitted to the bus.
The outputs can, however, be activated by manual operation on the device, if the bus or mains
voltage and the valve voltage supply are on. In the manual control mode, no feedback
telegrams are sent to the bus. Other functions of the actuator are deactivated.
The device can be programmed and put into operation via the ETS. The physical address is
preset to 15.15.255
Furthermore, the device has been configured at the factory with the following characteristics (all
valve outputs)...
- Valve direction of action: deenergised closed
- Pulse width modulation on "Open valve": 50 %
- Cycle time: 20 minutes
- Behaviour on bus failure: Activate command value for emergency operation (30 %), if
mains and valve voltage supply available. If the bus and mains voltage fail, all the valve
outputs switch OFF.
- Behaviour after bus voltage return: All the valves close (valve outputs switch OFF).
iThe as-delivered state cannot be restored by unloading the application program with the
aid of the ETS. When the application program is removed, all the valve outputs remain
permanently switched off. The manual operation remains without function in this case.
Page 100 of 134
Software "Switch PWM 2068 / 1.0"
Functional description

Art. No. MTN6730-0001
4.2.5 Parameters
Description Values Comment
h General
Setting the parameters
of the outputs
To simplify the configuration, all the
valve outputs can be assigned to the
same parameters in the ETS and thus
configured identically. This parameter
stipulates whether every valve output of
the device can be configured individually
or whether all the outputs should be
configured by the same parameters.
all outputs equal In the "All outputs equal" setting, the
number of parameters in the ETS is
reduced. The visible parameters are
then used on all the valve outputs
automatically. Only the communication
objects can then be configured
separately for the outputs. This setting
should be selected, for example, if all
the actuators behave identically and
should only be activated by different
group addresses (e.g. in office blocks or
in hotel rooms).
each output individual In the parameter setting "Each output
individually", each valve output
possesses its own parameter pages in
the ETS.
Delay after bus voltage
return
Minutes (0...59)
0...59 To reduce telegram traffic on the bus
line after bus voltage switch-on (bus
reset), after connection of the device to
the bus line or after an ETS
programming operation, it is possible to
delay selected active feedback of the
actuator. This parameter defines a delay
time independent of the channel for this
case. Only after the time configured
here has elapsed are status or feedback
telegrams for initialisation transmitted to
the bus, provided that the status and
feedback functions are to be transmitted
after a delay.
Setting the delay time minutes.
0...17...59 Setting the delay time seconds.
Time for cycl.
transmission of
feedback
Hours (0...23)
0...23 The transmitting feedback telegrams of
the actuator can, depending on the
parameterisation, also transmit their
state cyclically to the bus. The
parameter "Time for cyclical
transmission of feedback tel." generally
defines the cycle time for all valve
Page 101 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
outputs.
Setting the cycle time hours.
Minutes (0...59) 0…2...59 Setting the cycle time minutes.
Seconds (10...59) 10...59 Setting the cycle time seconds.
Time for cycl.
transmission of
operating hours
Hours (0...23)
0...23 The operating hours counters -
depending on the parameterisation - can
also transmit their counter value
cyclically to the bus. The parameter
"Time for cyclical transmission of
feedback tel." generally defines the
cycle time for all valve outputs.
Setting the cycle time hours.
Minutes (0...59) 0...59 Setting the cycle time minutes.
Seconds (10...59) 10...59 Setting the cycle time seconds.
Summer/winter mode
switch-over
The actuator possesses a summer /
winter switch-over. Depending on the
season, this allows the setting of
different command value setpoints for a
valve output for emergency operation or
forced position.
no The summer / winter switch-over is not
available. For the valve outputs, only
one command value can be configured
separately for emergency operation or a
forced position.
yes The summer / winter switch-over is
enabled. The communication object
"Summer / winter switch-over" becomes
visible in the ETS. Summer and winter
command values can be configured for
emergency operation and a forced
position for the valve outputs.
Polarity of "Summer /
winter switch-over""
object
1 = Summer / 0 = Winter
1 = Winter / 0 = Summer
This parameter sets the telegram
polarity of the "Summer / winter switch-
over" object. It is only visible when the
summer / winter switch-over is enabled.
Operating mode after
ETS programming
The "Summer" or "Winter" state preset
via the object "Summer / winter switch-
over" is stored internally in the device
and is restored after a device reset (bus
or mains voltage return). The parameter
"Operating mode after ETS
programming operation" defines which
operating mode is active after ETS
commissioning.
Summer mode In this setting, the actuator activates
summer operation after an ETS
programming operation. This overwrites
the value saved internally in the device.
Page 102 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Winter mode In this setting, the actuator activates
winter mode after an ETS programming
operation. This overwrites the value
saved internally in the device.
no change (saved
operating mode)
In this configuration, the actuator
activates the most recently saved
operating mode.
Use service mode ? Service mode allows the bus-controlled
locking of all or some valve outputs for
maintenance or installation purposes. If
service mode is active, actuators can be
moved to a defined position (completely
open or closed) and locked against
activation by command value telegrams.
Service mode must first be enabled
here, so that it can be activated and
deactivated via the KNX during actuator
operation.
no Service mode is not available. No valve
outputs can be assigned to service
mode in the ETS.
yes Service mode is enabled. The
communication object "Service mode -
Deactivate / activate input" becomes
visible. Valve outputs can be assigned
on the parameter pages "Ax -
assignments".
Behaviour at the end of
the service mode
no change
Close all outputs
completely
Open all outputs completely
Track states
The parameter "Behaviour at the end of
service mode" specifies the state to
which the affected valve outputs go on
deactivating service operation. This
parameter is only visible when service
operation is used.
h Valve / pump
Collective feedback
status of value outputs
(opened /
closed) ?
After central commands or after
bus/mains voltage return, a KNX line is
generally heavily loaded by data traffic
as many bus devices are transmitting
the state of their communication objects
by means of feedback telegrams. This
effect occurs particularly when using
visualisations. Collective feedback can
be used to keep the telegram load low
during initialisation.
no Collective feedback is deactivated. No
collective feedback object is available.
yes Collective feedback is enabled. The
collective feedback object becomes
visible in the ETS.
Page 103 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Collective feedback
type
Collective feedback can be provided in
the function of an active signalling object
or a passive status object. In the case of
an active signal object, the feedback is
automatically transmitted to the bus
whenever the status contained therein
changes. In the function as a passive
status object, there is no automatic
telegram transmission. In this case, the
object value must be read out. The ETS
automatically sets the object
communication flags required for proper
functioning.
This parameter is visible only if
collective feedback is enabled.
active signalling object The actuator transmits the collective
feedback automatically when the object
value is updated. After a device reset
(ETS programming operation, bus and
mains voltage return, only bus voltage
return), current collective feedback is
always transmitted.
passive status object Collective feedback will only be
transmitted in response if the object is
read out from the bus. No automatic
telegram transmission of the collective
feedback takes place after bus or mains
voltage return or after an ETS
programming operation.
Time delay for feedback
telegram after bus
voltage
return ?
If used as active signal object, the
collective feedback is transmitted to the
bus after bus and mains voltage return,
after just bus voltage return or after an
ETS programming operation. In these
cases, the feedback can be time-
delayed with the time delay being preset
globally for all device feedback together
on the "General" parameter page.
This parameter is visible only if
collective feedback is enabled.
no The collective feedback is transmitted
immediately after bus / mains voltage
return or after an ETS programming
operation.
yes The collective feedback telegram is
transmitted with a delay after bus and
mains voltage return, after just bus
voltage return or after programming in
ETS. No feedback is transmitted during
a running time delay, even if a valve
state changes.
Cyclical transmission of
the feedback ?
The object of the collective feedback
can also transmit its value cyclically in
addition to transmission when updating.
Page 104 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
This parameter is visible only if
collective feedback is enabled.
no Cyclical transmission is deactivated,
which means that collective feedback is
only transmitted to the bus if one of the
valve states changes.
yes Cyclical transmission is activated.
Signal operating voltage
failure of the valves?
no
yes
The actuator monitors the power supply
of the actuators. On a failure, a 1-bit
signal telegram can be transmitted. This
parameter enables the feedback
function.
Polarity of the object
"Failure of operating
voltage"
0 = Voltage present /
1 = Voltage failed
0 = Voltage failed /
1 = Voltage present
This parameter sets the telegram
polarity of the signal telegram for the
transmission of a failure of the valve
operating voltage. It is only visible when
"Signal operating voltage failure of the
valves ?" = "Yes".
Transmit feedback after
bus voltage return ?
no
yes
The object for the transmission of a
failure of the valve operating voltage can
actively transmit the feedback
information after a bus voltage return
and an ETS programming operation.
This parameter specifies whether active
telegram transmission should take place
after a device reset or not.
This parameter is only visible with
"Signal operating voltage failure of the
valves?" = "Yes".
Time delay for feedback
telegram after bus
voltage
return ?
The feedback "Failure of operating
voltage" is transmitted to the bus after
bus and mains voltage return, after just
bus voltage return or after programming
in ETS. In these cases, the feedback
can be time-delayed with the time delay
being preset globally for all device
feedback together on the "General"
parameter page.
This parameter is only visible if the
signal function is enabled and
transmission after bus voltage return is
enabled.
no The feedback "Failure of operating
voltage" is transmitted immediately after
bus / mains voltage return or after an
ETS programming operation.
yes The feedback "Failure of operating
voltage" is transmitted with a delay after
bus and mains voltage return, after just
bus voltage return or after programming
Page 105 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
in ETS. No feedback is transmitted
during a running time delay, even if the
state changes.
Cyclical transmission of
the feedback if no
voltage
present ?
no
yes
The signal telegram "Failure of
operating voltage" can be transmitted
cyclically, should the actuator determine
a failed valve operating voltage. This
parameter specifies whether cyclical
telegram transmission should take place
or not. If the valve operating voltage
exists, then transmission is generally not
cyclical.
This parameter is only visible with
"Signal operating voltage failure of the
valves?" = "Yes".
Global reset of all
signals "Short-circuit /
overload" ?
no
yes
The actuator is able to detect an
overload or a short-circuit at the valve
outputs and, in consequence, to protect
them against destruction. Outputs which
have experienced a short-circuit or a
constant load are deactivated after an
identification period. In this case, a
short-circuit or overload signal can be
transmitted via a KNX communication
object.
This parameter defines whether a global
and thus simultaneous reset of the
short-circuit / overload signals of all
valve outputs is possible. In the "Yes"
setting, the 1-bit communication object
"Reset short-circuit / Overload" is
available.
Individual short-circuit / overload signals
can only be reset via the object when
the testing cycle (waiting time and
testing cycle time) of the affected valve
outputs has been completed.
Activate function "Heat
requirement" ?
no
yes
The heating actuator can even evaluate
the command values of its outputs and
make general heat requirement
available in the form of limiting value
monitoring with hysteresis (1 bit,
switching). Using a KNX switch actuator,
this allows the energy-efficient activation
of burner and boiler controllers with
suitable control inputs (e.g. requirement-
orientated switch-over between the
reduction and comfort setpoint in a
central combi boiler).
Here, the heat requirement control of the
actuator can be enabled centrally ("Yes"
setting). The valve outputs must be
assigned to the heat requirement control
individually on the parameter pages "Ax
- Assignments", so that they are
Page 106 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
included in the requirement
determination.
Polarity of "Heat
requirement" object
0 = No heat requirement /
1 = Heat requirement
0 = Heat requirement /
1 = No heat requirement
This parameter defines the telegram
polarity of the "Heat requirement" object.
It is visible only if the heat requirement
function is enabled.
Record external heat
requirement ?
no
yes
The actuator is able to evaluate an
external heat requirement (e.g. from
another heating actuator). The local
heating actuator links the external
telegram with the internal status of its
own heat requirement logically as OR
and outputs the result of this link via the
object "Heat requirement".
In the "Yes" setting, this parameter will
enable the object "External heat
requirement". It is visible only if the heat
requirement function is enabled.
Limiting value minimum
command value for heat
requirement
(0...100 %)
0...100 The actuator only signals a heat
requirement when at least one
command value of the assigned outputs
exceeds the limiting value defined here
plus the hysteresis (see next
parameter). A heat requirement signal is
retracted when the limiting value is
reached or undershot again.
This parameter is visible only if the heat
requirement function is enabled.
Hysteresis for limiting
value minimum
command value
(1...20 %)
1...10...20 This parameter specifies the hysteresis
of the limiting value of the minimum
command value of the heat requirement
control. The actuator signals a heat
requirement when a command value
exceeds the defined limiting value plus
the hysteresis defined here.
This parameter is visible only if the heat
requirement function is enabled.
Delay heat requirement
ACTIVE
Hours (0...23)
0...23 The actuator only outputs the telegram
of an active heat requirement after
determination when the delay time
defined here has elapsed. No heat
requirement request is transmitted if the
actuator no longer determines a heat
requirement within the time preset here.
This parameter is visible only if the heat
requirement function is enabled.
Definition of the delay time hours.
Minutes (0...59) 0...5...59 Definition of the delay time minutes.
Page 107 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Seconds (0...59) 0...59 Definition of the delay time seconds.
Delay heat requirement
INACTIVE
Hours (0...23)
0...23 The actuator only retracts heat
requirement information after
determination when the delay time
defined here has elapsed. The heat
requirement information is not retracted
if the actuator no longer determines a
new heat requirement within the time
preset here. This parameter is visible
only if the heat requirement function is
enabled.
Definition of the delay time hours.
Minutes (0...59) 0...5...59 Definition of the delay time minutes.
Seconds (0...59) 0...59 Definition of the delay time seconds.
Activate "Largest
command value"
function ?
no
yes
The actuator can determine the largest
constant command value and forward it
to another bus device (e.g. suitable
calorific furnaces with integrated KNX
control or visualisation). In the "Yes"
setting, the heating actuator evaluates
all the active 1-byte command values of
the valve outputs and, optionally, the
externally received largest command
value (object "External largest command
value") and transmits the largest
command value via the "Largest
command value" object.
In the case of valve outputs configured
in the ETS to the command value data
formats "Switching (1-bit)" or "Constant
(1-byte) with command value limiting
value", there is no evaluation of the
command values preset via the bus.
Exception: It may also occur with such
command value outputs that a constant
command value is active (e.g. after
bus/mains voltage return or a forced
position and emergency operation or
manual operation). In this case, this
constant command value is also
included in the calculation of the largest
command value until the named
functions with a higher priority are exited
or a new command value telegram is
received via the bus, overriding the
constant command value at the valve
output.
Transmission of the
largest command value
The largest command value determined
by the heating actuator is actively
transmitted to the bus. This parameter
decides when a telegram is transmitted
via the "Largest command value" object.
This parameter is visible only if the
Page 108 of 134
Software "Switch PWM 2068 / 1.0"
Parameters
Art. No. MTN6730-0001
"Largest command value" function is
enabled.
only on change A telegram is only transmitted when the
largest command value changes.
only cyclical The actuator only transmits the "Largest
command value" telegram cyclically.
The cycle time is defined globally for all
feedback on the parameter page
"General".
on change and cyclical The actuator transmits the "Largest
command value" when the object value
changes and also cyclically.
Transmit on change by 0.3 %, 0.5 %, 1...3...20 % Here, the change interval of the largest
command value for automatic
transmission is defined. The actuator
only transmits a new telegram value
when the largest command value has
changed by the interval preset here
since the last transmission operation.
This parameter is visible only if the
"Largest command value" function is
enabled.
Record external largest
command value ?
no
yes
The actuator is able to evaluate an
external largest control value (e.g. from
another heating actuator). The local
heating actuator monitors the external
telegram with its own active constant
command values and outputs the largest
of all command values via the object
"Largest control value".
This parameter will enable the object
"External largest command value" in the
"Yes" setting. It is only available when
the "Largest command value" function is
enabled.
Activate "Pump control"
function ?
no
yes
The heating actuator allows switching
activation of the circulation pump of a
heating or cooling circuit via a 1-bit KNX
telegram.
Here, the pump control of the actuator
can be enabled centrally ("Yes" setting).
The valve outputs must be assigned to
the pump control individually on the
parameter pages "Ax - Assignments", so
that they are included in the control.
Polarity of "Pump
control" object
0 = Switch off pump /
1 = Switch on pump
0 = Switch on pump/
1 = Switch off pump
This parameter defines the telegram
polarity of the "Pump control" object. It is
visible only if the pump control is
enabled.
Page 109 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Record external pump
control ?
no
yes
The actuator is able to evaluate an
external pump control signal (e.g. from
another heating actuator). The local
heating actuator links the external
telegram with the internal status of the
pump logically as OR and outputs the
result of this link via the object "Switch
pump".
This parameter will enable the object
"External pump control" in the "Yes"
setting. It is visible only if the pump
control is enabled.
Limiting value minimum
command value for
pump
(0...100 %)
0...100 The actuator only switches the pump on
when at least one command value of the
assigned outputs exceeds the defined
limiting value plus the hysteresis defined
here (see next parameter). The pump is
switched off when the limiting value is
reached or undershot again.
This parameter is visible only if the
pump control is enabled.
Hysteresis for limiting
value minimum
command value
(1...20 %)
1...20 This parameter specifies the hysteresis
of the limiting value of the minimum
command value of the pump control.
The actuator only switches the pump on
when a command value exceeds the
defined limiting value plus the hysteresis
defined here.
This parameter is visible only if the
pump control is enabled.
Delay pump ACTIVE
Minutes (0...59)
0...59 The actuator only outputs the ON
telegram to the pump after
determination when the delay time
defined here has elapsed. The pump is
not switched on when the actuator
determines within the preset time here
that the pump must remain switched off,
due to a limiting value plus hysteresis
again being undershot. This parameter
is visible only if the pump control is
enabled.
Definition of the delay time minutes.
Seconds (0...59) 0...10...59 Definition of the delay time seconds.
Delay pump INACTIVE
Hours (0...23)
0...23 The actuator only outputs the OFF
telegram to the pump after
determination when the delay time
defined here has elapsed. The pump is
not switched on when the actuator
determines within the preset time here
that the pump must remain switched off,
due to a limiting value again being
Page 110 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
exceeded. This parameter is visible only
if the pump control is enabled.
Definition of the delay time hours.
Minutes (0...59) 0...10...59 Definition of the delay time minutes.
Seconds (0...59) 0...59 Definition of the delay time seconds.
Activate anti-sticking
protection
no
yes
If pump control is enabled, optional
cyclical anti-sticking protection can
prevent the sticking of the pump, if it has
not been switched on by the command
value evaluation for a longer period of
time. In the "Yes" setting, this parameter
enables cyclical anti-sticking protection.
Time for cyclical
switching on of the
pump
(1...26 weeks)
1...26 When anti-sticking protection is enabled,
the length of protection function is
defined here. If the pump is not switched
on at least once during the time here by
the pump controller, then the actuator
will executed anti-sticking protection, if
necessary on a regular basis.
Switch-on time of the
pump
(1...15 minutes)
1...5...15 When anti-sticking protection is enabled,
the length of pump running for the
cyclical protection function must be
preset here. The actuator then switches
the pump on for the set time here
without interruption, assuming that anti-
sticking protection must be executed.
h Manual operation
Manual control in case
of bus voltage failure
disabled
enabled
This parameter can be used for
programming whether manual operation
is to be possible or deactivated in case
of bus voltage failure (bus voltage
switched off).
Manual control during
bus operation
disabled
enabled
This parameter can be used for
programming whether manual operation
is to be possible or deactivated during
bus operation (bus voltage on).
Disabling function ? Yes
No
Manual control can be disabled via the
bus, even if it is already active. For this
purpose, the disabling object can be
enabled here.
This parameter is only visible if manual
control is enabled during bus operation.
Page 111 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Polarity of disable
object
0 = enabled;
1 = disabled
0 = disabled;
1 = enabled
This parameter sets the polarity of the
disabling object.
This parameter is only visible if manual
control is enabled during bus operation.
Transmit status ? yes
no
The current state of manual control can
be transmitted to the bus via a separate
status object, if bus voltage is available
(setting: "Yes").
This parameter is only visible if manual
control is enabled during bus operation.
Status object function
and polarity
This parameter defines the information
contained in the status object. The
object is always "0", when the manual
control mode is deactivated.
This parameter is only visible if manual
control is enabled during bus operation.
0 = inactive;
1 = man.contr.active
The object is "1" when the manual
control mode is active (temporary or
permanent).
0 = inactive;
1 = perman. man. control
active
The object is "1" only when the
permanent manual control is active.
Behaviour at the end of
permanent manual
control during bus
operation
The behaviour of the actuator at the end
of permanent manual control depends
on this parameter.
This parameter is only visible if manual
control is enabled during bus operation.
no change After the end of the permanent manual
operation, the current state of all valve
outputs remains unchanged. If,
however, a function with a priority lower
than that of manual operation (e.g.
forced position, service mode) has been
activated via the bus before or during
manual operation, the actuator sets the
reaction preset for this function for the
appropriate outputs.
Output tracking During active permanent manual
operation, all incoming telegrams and
state changes are tracked internally. At
the end of the manual operation, the
valve outputs are set according to the
most recently received command or the
most recently activated function with a
lower priority.
Behaviour of manual
operation on bus
voltage
return
This parameter defines whether an
active short-time or permanent manual
operation can be terminated, should the
bus voltage fail, or not.
The following always applies: If the
Page 112 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
mains voltage supply is not switched on,
manual operation is possible is bus
voltage is available (valve output can
only be activated if a valve power supply
is available). If, in this case, the bus
voltage is switched off, the actuator also
always exits manual operation, as there
is no power supply to the device
electronics. After the bus voltage return
(mains power supply switched off),
manual operation is always deactivated.
This parameter is only visible if manual
control is enabled during bus operation.
Exit manual operation After the bus voltage return through a
mains power supply being available,
active manual operation is exited. For
example, this means that it is possible to
deactivate manual operation through a
simultaneous bus reset on multiple
actuators with the same parameter
setting.
Do not exit manual
operation
After the bus voltage return through a
mains power supply being available,
active manual operation is never exited.
Disable bus control of
individual outputs during
bus operation
yes
no
Individual valve outputs can be disabled
locally during permanent manual
operation, so that the disabled outputs
can no longer be activated using input
command value telegrams or lower-
priority device functions. Disabling via
manual operation is only permitted if this
parameter is set to "Yes".
This parameter is only visible if manual
control is enabled during bus operation.
Cycle time during
manual operation
0.5 minutes
1 minute
1.5 minutes
2 minutes
...
19.5 minutes
20 minutes
(recommended)
During manual operation, all the valve
outputs are activated with a pulse-width
modulation (PWM) using the OPEN
button, irrespective of the configured
command value data format (1-bit or
1-byte). The cycle time of the PWM
signal for a valve output activated by
manual operation is configured by this
parameter. In consequence, a manual
operation locally on the device can allow
the use of a different cycle time than in
normal operation of the actuator
(activation via KNX telegrams).
The CLOSE command always closes
the valves completely (0 %).
An exception is the central operating
function of all valve outputs with the ALL
OP / CL button. Here, the actuator
always activates the valve outputs with a
constant signal (0 % or 100 %).
Page 113 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
PWM in manual control
(5...100 %)
5...50...100 This parameter specifies the pulse-
pause ratio of the pulse width
modulation of the manual operation for
opened valve outputs.
h Ax - General
Valve in voltage-free
state
(Valve direction of
action)
closed
open
Valve drives that are closed or open
when deenergised can be connected.
On each electrical activation of the valve
outputs, the actuator takes the valve
direction of action configured here into
account, so that the command value
presettings (Valve closed OFF, 0 % /
Valve opened ON, 1...100 %) can be
executed in the correct direction of
action. The valve outputs are no longer
energised if the valve voltage supply
fails or if there is a short-circuit or
overload. The actuator takes this state
into account and also influences the
command value feedback, according to
the configured valve direction of action.
Behaviour after bus
voltage
failure
If there is a bus voltage failure, the valve
outputs perform the configured reaction
at this point.
no change The command value active before the
bus voltage failure remains unchanged.
Specify command value The actuator sets the command value
preset in the ETS for the valve output by
the parameter "Command value on bus
voltage failure".
Activating command as for
forced position
For the valve output, the actuator polls
the command value preset for the forced
position, as configured in the ETS. Here,
the active operating mode (summer /
winter) is taken into account, providing
that a summer / winter change-over is
configured.
Ensure that, in this setting, the forced
position function is not executed! The
actuator only polls the command value
preset for the forced position.
Activating command as
for emergency operation
For the valve output, the actuator polls
the emergency operation command
value, as configured in the ETS. Here,
the active operating mode (summer /
winter) is taken into account, providing
that a summer / winter change-over is
configured.
Ensure that, in this setting, emergency
operation is not executed (as would be
the case if there was a faulty command
value found in the course of command
value monitoring)! The actuator only
polls the command value preset for
Page 114 of 134
Software "Switch PWM 2068 / 1.0"
Parameters
Art. No. MTN6730-0001
emergency operation.
Command value in case
of bus voltage failure
0 %
5 %
10 %
...
90 %
95 %
100 %
The command value to be set on bus
voltage failure is defined here. This
parameter is only visible on "Behaviour
in case of bus voltage failure" = "Preset
command value".
For valve outputs configured in the ETS
to the command value data formats
"Switching (1-bit)" or "Constant (1-byte)
with command value limiting value", a
constant command value can also be
preset using this parameter. In this case,
a pulse width modulation (5 % ... 95 %)
is executed for the affected command
value outputs. In the "0 %" and "100 %"
presettings, the valve outputs are
activated continuously. The preset PWM
remains active until other functions
(manual operation, short-
circuit/overload) have been executed,
which may override the constant
command value on the valve output.
Behaviour after bus or
mains voltage
return
After bus or mains voltage return, the
valve outputs perform the configured
reaction at this point.
Specify command value The actuator sets the command value in
the ETS preset for the valve output by
the parameter "Command value after
bus or mains voltage return".
Activating command as for
forced position
For the valve output, the actuator polls
the command value preset for the forced
position, as configured in the ETS. Here,
the active operating mode (summer /
winter) is taken into account, providing
that a summer / winter change-over is
configured.
Ensure that, in this setting, the forced
position function is not executed! The
actuator only polls the command value
preset for the forced position.
Activating command as for
emergency operation
For the valve output, the actuator polls
the emergency operation command
value, as configured in the ETS. Here,
the active operating mode (summer /
winter) is taken into account, providing
that a summer / winter change-over is
configured.
Ensure that, in this setting, emergency
operation is not executed (as would be
the case if there was a faulty command
value found in the course of command
value monitoring)! The actuator only
polls the command value preset for
emergency operation.
Page 115 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Command value as before
bus voltage failure
After bus or mains voltage return, that
command value is set at the valve
output which was active at the moment
of the last bus voltage failure. If there is
a bus voltage failure, the actuator saves
the active command value internally in
the device, so that the command value
can be restored when the device power
supply returns. Saving only takes place
after a previous device reset (ETS
programming operation, bus voltage
return) when the reset is longer than 30
seconds previously. Otherwise the
actuator does not save the current
command value! In that case, an old
value remains valid, as was previously
saved by the actuator on the bus voltage
failure.
If only the mains power supply fails, the
actuator does not save the command
value.
Command value after
bus or mains voltage
return
0 %
5 %
10 %
...
90 %
95 %
100 %
The command value to be set after bus
or mains voltage return is defined here.
This parameter is only visible on
"Behaviour in case of bus or mains
voltage return" = "Preset command
value".
For valve outputs configured in the ETS
to the command value data formats
"Switching (1-bit)" or "Constant (1-byte)
with command value limiting value", a
constant command value can also be
preset using this parameter. In this case,
a pulse width modulation (5 % ... 95 %)
is executed for the affected command
value outputs. In the "0 %" and "100 %"
presettings, the valve outputs are
activated continuously. The preset PWM
remains active until other functions have
been executed or a new command value
telegram is received via the bus,
overriding the constant command value
on the valve output.
Behaviour after ETS
programming
After an ETS programming operation,
the valve outputs perform the configured
reaction at this point.
Behaviour as after bus
voltage return
After an ETS programming operation,
the valve output will behaviour in the
manner defined in the parameter
"Behaviour after bus or mains voltage
return". If the behaviour there is
configured to "Command value as
before bus voltage failure", then that
command value is also set after an ETS
programming operation which was
active at the time of the last bus voltage
failure. An ETS programming operation
Page 116 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
does not overwrite the saved command
value.
Specify command value The actuator sets the command value
preset for the valve output by the
parameter "Command value after ETS
programming operation" in the ETS.
Activating command as for
forced position
For the valve output, the actuator polls
the command value preset for the forced
position, as configured in the ETS. Here,
the active operating mode (summer /
winter) is taken into account, providing
that a summer / winter change-over is
configured.
Ensure that, in this setting, the forced
position function is not executed! The
actuator only polls the command value
preset for the forced position.
Activating command as for
emergency operation
For the valve output, the actuator polls
the emergency operation command
value, as configured in the ETS. Here,
the active operating mode (summer /
winter) is taken into account, providing
that a summer / winter change-over is
configured.
Ensure that, in this setting, emergency
operation is not executed (as would be
the case if there was a faulty command
value found in the course of command
value monitoring)! The actuator only
polls the command value preset for
emergency operation.
Command value after
ETS programming
0 %
5 %
10 %
...
90 %
95 %
100 %
The command value to be set after an
ETS programming operation is defined
here. This parameter is only visible on
"Behaviour after ETS programming
operation" = "Preset command value".
For valve outputs configured in the ETS
to the command value data formats
"Switching (1-bit)" or "Constant (1-byte)
with command value limiting value", a
constant command value can also be
preset using this parameter. In this case,
a pulse width modulation (5 % ... 95 %)
is executed for the affected command
value outputs. In the "0 %" and "100 %"
presettings, the valve outputs are
activated continuously. The preset PWM
remains active until other functions have
been executed or a new command value
telegram is received via the bus,
overriding the constant command value
on the valve output.
h Ax - Command value/status/operating mode
Data format of the
command value input
The heating actuator receives 1-bit or
1-byte command value telegrams,
transmitted, for example, by KNX room
temperature controllers. Usually, the
Page 117 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
room temperature controller determines
the room temperature and generates the
command value telegrams using a
control algorithm. The actuator controls
its valve outputs either in switching form
or with a PWM signal, according to the
data format of the command values and
the configuration in the ETS.
Switching (1 bit) In the case of a 1-bit command value,
the telegram received via the command
value object is forwarded directly to the
appropriate output of the actuator, taking
the configured valve direction of action
into account. This means that, if an "ON"
telegram is received, the is valve
completely opened. The output is then
energised for energised closed valves
and the output is deenergised for
energised opened valve drives. The
valve is closed completely when an
"OFF" telegram is received. The valve
output is then not energised for
deenergised closed valves and
energised for deenergised opened valve
drives.
Constantly (1 byte) with
pulse width modulation
(PWM)
Command values corresponding to the
data format "Constant 1-byte with pulse
width modulation (PWM)" are
implemented by the actuator with an
equivalent pulse-width-modulated switch
signal at the valve outputs. Taking the
cycle time settable in the actuator for
each output into account, the average
output signal resulting from this
modulation is a measure of the centred
valve position of the control valve and
thus a reference for the set room
temperature. A shift of the mean value,
and thus a change in the heating
capacity, can be obtained by changing
the duty factor of the switch-on and
switch-off pulses of the output signal.
The duty factor is adapted constantly by
the actuator, depending on the
command value received (normal
operation) or by active device functions
(e.g. manual operation, forced position,
emergency operation).
Switching (1-byte) with
command value limiting
value
The data format with limiting value
evaluation can be used as an alternative
to the conversion of a 1-byte command
value into constant pulse width
modulation at a valve output. Here, the
received constant command value is
converted into a switching output signal,
depending on the configured limiting
value. The actuator opens when the
command value reaches the limiting
value or exceeds it. A hysteresis is also
evaluated to prevent constant closing
and opening of the actuator for
Page 118 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
command values in the area of the
limiting value. The actuator only closes
when the command value undershoots
the limiting value minus the configured
hysteresis.
Cycle time for
continuous command
value on the valve
output
0.5 minutes
1 minute
1.5 minutes
2 minutes
...
19.5 minutes
20 minutes
(recommended)
The "Cycle time" parameter specifies
the switching frequency of the pulse-
width-modulated output signal of a valve
output. It allows adaptation to the
adjusting cycle times (the adjusting time
it takes the drive to bring the valve from
its completely closed to its completely
opened position) of the actuators used.
In addition to the adjusting cycle time,
take account of the dead time (the time
in which the actuators do not show any
response when being switched or off). If
different actuators with different
adjusting cycle times are used at an
output, take account of the longest of
the times.
The "Cycle time" parameter is also
available for valve drives, whose
command value data format is
configured to "Switching (1-bit)" or
"Constant (1-byte) with command value
limiting value". For such valve outputs,
pulse width modulation can also be
executed during an active forced
position, emergency operation, manual
operation, bus voltage failure, after bus
or mains voltage return or after an ETS
programming operation, for which, as a
result, the presetting of a cycle time is
required.
Limiting value of the
command value for
opening the valve
(1...100 %)
1...10...100 In the 1-byte command value data with
limiting value evaluation, the received
constant command value is converted
into a switching output signal, depending
on the limiting value configured here.
The actuator opens when the command
value reaches the limiting value or
exceeds it.
This parameter is only available in the
command value data format "Switching
(1-byte) with command value limiting
value".
Hysteresis limiting value
for closing the valve
(1...10 %)
1...5...10 In the 1-byte command value data with
limiting value evaluation, the received
constant command value is converted
into a switching output signal. A
hysteresis is also evaluated to prevent
constant closing and opening of the
actuator for command values in the area
of the limiting value. The actuator only
Page 119 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
closes when the command value
undershoots the limiting value minus the
configured hysteresis.
This parameter is only available in the
command value data format "Switching
(1-byte) with command value limiting
value".
Activate command
value monitoring ?
no
yes
Here, cyclical monitoring of the
command values can be enabled as an
option ("Yes" setting). If, in active
cyclical monitoring, there are no
command value telegrams during the
monitoring time preset by the parameter
of the same name, then emergency
operation is activated for the affected
valve output, for which a configurable
constant PWM command value can be
preset.
Monitoring time
Minutes (0...59)
0...10...59 This parameter specifies the monitoring
time of the command value monitoring.
The actuator must receive at least one
command value telegram within the time
frame preset here. If there is no
command value telegram, then the
actuator will assume a fault and will
activate emergency operation for the
affected valve output. This parameter is
only available if command value
monitoring is enabled.
presetting of the monitoring time
minutes.
Seconds (10...59) 10...59 presetting of the monitoring time
seconds.
Polarity of "Command
value fault" object
0 = No fault /
1 = Fault
0 = Fault /
1 = No fault
If a command value fault is identified,
then the actuator can optionally transmit
a fault telegram via the object
"Command value fault". This parameter
defines the telegram polarity of the fault
telegram.
This parameter is only available if
command value monitoring is enabled.
Cyclical transmission in
the case of faulty
command value ?
no
yes
If a command value fault is identified,
then the actuator can optionally transmit
the fault telegram cyclically. Here, the
cyclical transmission of the fault
telegram can be enabled as required
("Yes" setting).
This parameter is only available if
command value monitoring is enabled.
Page 120 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Command value in the
case of emergency
operation
0 %
10 %
...
30 %
...
90 %
100 %
When a fault in the input command
value is detected and also in the case of
a bus voltage failure, after bus or mains
voltage return and after an ETS
programming operation (configurable), it
is possible to set the emergency
operation command value configured
here as the active command value.
When the command value of emergency
operation is polled, valve outputs
configured to the command value data
formats "Switching (1-bit)" or "Constant
(1-byte) with command value limiting
value" are always activated by a
constant command value with pulse
width modulation.
This parameter is only available when
no summer / winter switch-over is
planned.
Command value in the
case of emergency
operation
Summer
0 %
10 %
...
30 %
...
90 %
100 %
When a fault in the input command
value is detected and also in the case of
a bus voltage failure, after bus or mains
voltage return and after an ETS
programming operation (configurable), it
is possible to set the emergency
operation command value configured
here as the active command value. The
command value preset here is only
applied if summer operation is activated.
When the command value of emergency
operation is polled, valve outputs
configured to the command value data
formats "Switching (1-bit)" or "Constant
(1-byte) with command value limiting
value" are always activated by a
constant command value with pulse
width modulation.
This parameter is only available when a
summer / winter switch-over is planned.
Command value in the
case of emergency
operation
Winter
0 %
10 %
...
70 %
...
90 %
100 %
When a fault in the input command
value is detected and also in the case of
a bus voltage failure, after bus or mains
voltage return and after an ETS
programming operation (configurable), it
is possible to set the emergency
operation command value configured
here as the active command value. The
command value preset here is only
applied if winter mode is activated.
When the command value of emergency
operation is polled, valve outputs
configured to the command value data
formats "Switching (1-bit)" or "Constant
(1-byte) with command value limiting
value" are always activated by a
constant command value with pulse
width modulation.
Page 121 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
This parameter is only available when a
summer / winter switch-over is planned.
Command value in the
case of forced position
0 %
10 %
...
30 %
...
90 %
100 %
When forced operation is activated via a
1-bit object and also in the case of a bus
voltage failure, after bus or mains
voltage return and after an ETS
programming operation (configurable), it
is possible to set the forced command
value configured here as the active
command value.
When the command value of the forced
position is polled, valve outputs
configured to the command value data
formats "Switching (1-bit)" or "Constant
(1-byte) with command value limiting
value" are always activated by a
constant command value with pulse
width modulation.
This parameter is only available when
no summer / winter switch-over is
planned.
Command value in the
case of forced position
Summer
0 %
10 %
...
30 %
...
90 %
100 %
When forced operation is activated via a
1-bit object and also in the case of a bus
voltage failure, after bus or mains
voltage return and after an ETS
programming operation (configurable), it
is possible to set the forced command
value configured here as the active
command value. The command value
preset here is only applied if summer
operation is activated.
When the command value of the forced
position is polled, valve outputs
configured to the command value data
formats "Switching (1-bit)" or "Constant
(1-byte) with command value limiting
value" are always activated by a
constant command value with pulse
width modulation.
This parameter is only available when a
summer / winter switch-over is planned.
Command value in the
case of forced position
Winter
0 %
10 %
...
70 %
...
90 %
100 %
When forced operation is activated via a
1-bit object and also in the case of a bus
voltage failure, after bus or mains
voltage return and after an ETS
programming operation (configurable), it
is possible to set the forced command
value configured here as the active
command value. The command value
preset here is only applied if winter
mode is activated.
When the command value of the forced
position is polled, valve outputs
configured to the command value data
formats "Switching (1-bit)" or "Constant
Page 122 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
(1-byte) with command value limiting
value" are always activated by a
constant command value with pulse
width modulation.
This parameter is only available when a
summer / winter switch-over is planned.
Use object for forced
position ?
no
yes
A forced position can be configured
separately for each valve output here
and activated according to
requirements. If a forced position is
active, a defined command value is set
at the output (see parameter "Command
value in case of forced position...").
Affected valve outputs are then locked
so that they can no longer be activated
using functions subject to the forced
position (including activation by
command value telegrams).
For each valve output, the forced
position is activated and deactivated via
a separate 1-bit object. This parameter
will enable the object (setting "Yes").
Polarity of "Forced
position" object
0 = No forced pos. /
1 = Forced pos. active
0 = Forced pos. active /
1 = No forced pos.
The telegram polarity of the "Forced
position" object is defined here when the
forced position object is enabled.
Feed back valve
command value ?
no
yes
A status object can be optionally
enabled here ("Yes" setting) for each
valve output. The status object makes
the active command value of a valve
output available either actively
transmitting or passively (object can be
read out). During status feedback, the
actuator takes all the functions into
account which have an influence on the
command value implemented at the
output.
Type of feedback The status feedback can be used as an
active signal object or as a passive
status object. As an active signal object,
the feedback is also directly transmitted
to the bus whenever there is a change
to the status value. As a passive status
object, there is no telegram transmission
after a change. In this case, the object
value must be read out. The ETS
automatically sets the communication
flags of the status objects required for
proper functioning.
This parameter is only visible in case of
enabled status feedback.
Page 123 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
active signalling object The feedback telegram is transmitted as
soon as the status changes. An
automatic telegram transmission of the
feedback takes place after bus voltage
return, if the supply voltage of the
actuators fails and returns or after an
ETS programming operation (possibly
with a delay). The status object does not
transmit if the status does not change
after the activation or deactivation of
device functions or new input command
values. Transmission only ever takes
place after changes to the command
value.
passive status object The feedback telegram will only be
transmitted in response if the status
object is read out from the bus by a read
telegram. No automatic telegram
transmission of the feedback takes
place after bus voltage return, if the
supply voltage of the actuators fails and
returns or after an ETS programming
operation.
Time delay for feedback
telegram after bus
voltage
return ?
If used as active signal object, the state
of the status feedback information is
transmitted to the bus after bus voltage
return or after an ETS programming
operation. In these cases, feedback can
be time-delayed with the time delay
being preset globally for all valve
outputs together on the "General"
parameter page.
This parameter is only visible in case of
an enabled status feedback and only
when the object is actively transmitting.
yes The status feedback will be transmitted
with a delay after bus voltage return or
after an ETS programming operation.
No feedback is transmitted during a
running time delay, even if the valve
state changes during this delay. If the
supply voltage of the actuators fails and
returns, then the status feedback is
always transmitted without a delay,
providing that the bus voltage supply is
switched on.
no The status feedback will be transmitted
immediately after bus voltage return or
after an ETS programming operation.
Cyclical transmission of
the feedback ?
The status feedback telegram can also
be transmitted cyclically via the active
signal object in addition to the
transmission after changes.
This parameter is only visible in case of
Page 124 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
an enabled status feedback and only
when the object is actively transmitting.
yes Cyclical transmission is activated. The
cycle time is defined centrally for all the
valve outputs on the parameter page
"General". There is no cyclical
transmission during an active time delay
after bus voltage return or an ETS
programming operation.
no Cyclical transmission is deactivated so
that the feedback telegram is
transmitted to the bus only when the
status is changed by the actuator.
Feedback combined
valve status ?
no
yes
The combined valve status allows the
collective feedback of various functions
of a valve output in a single 1-byte bus
telegram. It helps to forward the status
information of an output to a suitable
recipient (e.g. KNX visualisation) in a
targeted manner, without having to
evaluated various global and channel-
orientated feedback and status functions
of the actuator. The communication
object "Feedback combined valve
status" contains 7 different items of
status information, which are bit-
encoded.
In the "Yes" setting, this parameter
enables the combined valve status.
Type of combined
status feedback
The combined valve status can be used
as an active signal object or as a
passive status object. As an active
signal object, the feedback is also
directly transmitted to the bus whenever
there is a change to the status value. As
a passive status object, there is no
telegram transmission after a change. In
this case, the object value must be read
out. The ETS automatically sets the
communication flags of the status
objects required for proper functioning.
This parameter is only available if the
combined valve status is enabled.
active signalling object The feedback telegram is transmitted as
soon as the status changes. Automatic
telegram transmission of the feedback
takes place after bus voltage return and
after an ETS programming operation
(possibly with a time delay). The
combined status object does not
transmit if the status information does
not change after the activation or
deactivation of device functions or new
input command values. Only changes
are ever transmitted. If the supply
Page 125 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
voltage of the actuators fails and
returns, then the combined status
feedback is not transmitted.
passive status object The feedback telegram will only be
transmitted in response if the status
object is read out from the bus by a read
telegram. No automatic telegram
transmission of the feedback takes
place after bus voltage return or after
programming with the ETS.
Time delay for feedback
telegram after bus
voltage
return ?
If used as active signal object, the state
of the combined status feedback
information is transmitted to the bus
after bus voltage return or after an ETS
programming operation. In these cases,
feedback can be time-delayed with the
time delay being preset globally for all
valve outputs together on the "General"
parameter page.
This parameter is only available if the
combined valve status is enabled.
yes The status feedback will be transmitted
with a delay after bus voltage return or
after an ETS programming operation.
No feedback is transmitted during a
running time delay, even if the valve
state changes during this delay. If the
supply voltage of the actuators fails and
returns, then the status feedback is
always transmitted without a delay,
providing that the bus voltage supply is
switched on.
no The status feedback will be transmitted
immediately after bus voltage return or
after an ETS programming operation.
Cyclical transmission of
the feedback ?
The combined status feedback telegram
can also be transmitted cyclically via the
active signal object in addition to the
transmission after changes.
This parameter is only available if the
combined valve status is enabled.
yes Cyclical transmission is activated. The
cycle time is defined centrally for all the
valve outputs on the parameter page
"General". There is no cyclical
transmission during an active time delay
after bus voltage return or an ETS
programming operation.
no Cyclical transmission is deactivated so
that the feedback telegram is
transmitted to the bus only when the
status is changed by the actuator.
Page 126 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Signalling short-circuit /
overload ?
no
yes
The actuator is able to detect an
overload or a short-circuit at the valve
outputs and, in consequence, to protect
them against destruction. Outputs which
have experienced a short-circuit or a
constant load are deactivated after an
identification period. In this case, a
short-circuit or overload signal can be
transmitted via a KNX communication
object.
In the "Yes" setting, this parameter
enables the object "Short-circuit /
overload signal".
Polarity of object "Short-
circuit / overload"
0 = No short-cir, overld. /
1 = Short-cir, overld.
0 = Short-cir, overld. /
1 = No short-cir, overld.
When the object for short-circuit /
overload messaging is enabled, the
telegram polarity of the "Short-circuit /
overload signal" object is defined here.
h Ax - Valve rinsing
Use function "Valve
rinsing" ?
no
yes
To prevent calcification or sticking of a
valve which has not been activated for
some time, the actuator has an
automatic valve rinsing function. Valve
rinsing can be executed cyclically or
using a bus command, causing the
activated valves to run through the full
valve stroke for a preset period of time.
During valve rinsing, the actuator
activates a command value of 100 %
without interruption for the affected valve
output for half of the configured "Valve
rinsing time". For this, the valves open
completely. After half the time, the
actuator switches to a command value
of 0%, causing the connected valves to
close completely.
In the "Yes" setting, this parameter
enables valve rinsing.
Length of valve rinsing
(1...59 minutes)
1...5...59 Here, preset for how long the rinse
function (100 % -> 0 %) is to be
executed. Set the length of the valve
rinsing to the adjustment cycle time of
the electrothermal actuators in such a
way that they open and close
completely. This is usually guaranteed
by configuring the rinsing length to
double the adjustment cycle time.
This parameter is only available if valve
rinsing is enabled.
Activate cyclical valve
rinsing ?
The actuator can perform valve rinsing
cyclically, if necessary. When using the
Page 127 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
cyclical valve rinsing, a rinse operation
can be started automatically after a
configurable cycle time (1...26 weeks).
Here too, the valve rinsing length
configured in the ETS defines the time
for the once-only, complete opening and
closing of the activated valve drives. At
the end of a rinsing operation, the
actuator always restarts the cycle time.
This parameter is only available if valve
rinsing is enabled.
yes Cyclical valve rinsing is enabled. Each
ETS programming operation resets the
cycle time. The first rinsing operation
with cyclical valve rinsing takes place
after an ETS programming operation
after the first time cycle has elapsed. If
there is a bus voltage failure, the
actuator saves the remaining residual
time of the current time cycle. The
residual cycle time is restarted after bus
voltage return. A bus voltage failure
immediately interrupts an active rinsing
operation. When the bus/mains voltage
returns, a previously interrupted rinsing
operation is not executed again. The
actuator then starts a new time cycle for
cyclical valve rinsing.
no Cyclical valve rinsing is completely
disabled. Valve rinsing can only be
started by the communication object (if
enabled).
Cycle time
(1...26 weeks)
1...26 This parameter defines how often
cyclical valve rinsing is to be performed
automatically.
This parameter is only available if
cyclical valve rinsing is enabled.
Use intelligent valve
rinsing ?
no
yes
Optionally, intelligent cyclical valve
rinsing can be additionally activated
here. Here, valve rinsing is only
executed repeatedly, if, in the current
time cycle, a configured minimum
command value limiting value was not
exceeded. It the active command value
exceeds the limiting value, then the
actuator will stop the cycle time. The
actuator only restarts the cycle time if, in
the further course of the command value
change, a command value of "0 %" or
"OFF" (completely closed) is set . This
prevents valve rinsing if the valve has
already run through a sufficiently defined
stroke.
If, after exceeding the configured limiting
value, the value was not completely
closed at least once (command value "0
Page 128 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
%" or "OFF"), then no further cyclical
valve rinsing will take place.
This parameter is only available if
cyclical valve rinsing is enabled.
Limiting value minimum
command value
(10...100 %)
10...50...100 This parameter defines the minimum
command value limiting value of the
intelligent valve rinsing. Intelligent valve
rinsing is only executed repeatedly, if, in
the current time cycle, a minimum
command value limiting value
configured here was not exceeded. It
the active command value exceeds the
limiting value, then the actuator will stop
the cycle time.
This parameter is only available if
cyclical valve rinsing is enabled.
Valve rinsing activated
externally ?
no
yes
If necessary, valve rinsing can be
started and, optionally, stopped using its
own 1-bit communication object. This
means that it is possible to activate a
rinsing operation of the valve controlled
by time or an event. It is also possible,
for example, to cascade multiple heating
actuators, so that they perform valve
rinsing simultaneously (link of the
individual status objects to the input
objects of the valve rinsing). Bus control
can only be used if it has been enabled
here.
This parameter is only available if valve
rinsing is enabled.
Polarity of object "Valve
rinsing Start / Stop"
0 = Stop / 1 = Start
0 = Start / 1 = Stop
0 = --- / 1 = Start (Stop not
possible)
This parameter sets the telegram
polarity of the object for external valve
rinsing. The name of the object is
aligned to the setting of the permitted
telegram polarity ("Start / stop valve
rinsing" or "Start valve rinsing"). When a
start command is received, the actuator
immediately starts the configured time
for a rinsing operation. The actuator also
actively executes valve rinsing if no
higher-priority function is active. If bus-
controlled stopping is permitted, then the
actuator will also react to stop
commands by immediately interrupting
running rinsing operations.
h Ax - Operating hours counter
Use operating hours
counter ?
no
yes
The operating hours counter can be
enabled here. The operating hours
counter determines the switch-on time of
a valve output. For the operating hours
Page 129 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
counter, an output is actively on, when it
is energised, i.e. when the status LED
on the front panel of the device. As a
result, the operating hours counter
determines the time during which
deenergised closed valves are opened
or deenergised opened valves are
closed.
If the operating hours counter is not
enabled, no operating hours will be
counted for the valve output concerned.
Once the operating hours counter is
enabled, however, the operating hours
will be determined and added up by the
ETS immediately after commissioning
the actuator.
If the operating hours counter is
subsequently disabled again in the
parameters and the actuator is
programmed with this disabling function,
all operating hours previously counted
will be deleted. When enabled again, the
counter status of the operating hours
counter is always on "0".
Type of counter Up-counter
Down-counter
The operating hours counter can be
configured as an up-counter or down-
counter. The setting here influences the
visibility of the other parameters and
objects of the operating hours counter.
Limiting value
specification ?
no
yes, as received via object
yes, as specified in
parameter
If the up-counter is used, a limiting value
can optionally be predefined. This
parameter defines whether the limiting
value can be set via a separate
parameter or adapted individually by a
communication object from the bus. The
"No" setting deactivates the limiting
value.
This parameter is only visible in the
configuration "Up-counter" counter type.
Limit value (0...65535 h) 0...65535 The limiting value of the up-counter is
set here.
This parameter is only visible in the "Up-
counter" counter type if the parameter
"Limiting value presetting ?" is set to
"Yes like the parameter".
Start value preset ? no
yes, as received via object
yes, as specified in
parameter
If the down-counter is used, a start value
can optionally be predefined. This
parameter defines whether the start
value can be set via a separate
parameter or adapted individually by a
communication object from the bus. The
setting "No" deactivates the start value.
Page 130 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
This parameter is only visible in the
"Down-counter" counter type.
Start value (0...65535 h) 0...65535 The start value of the down-counter is
set here.
This parameter is only visible in the
"Down-counter" counter type and also
only if the parameter "Start value preset
?" is set to "Yes like the parameter".
Automatic transmitting
of the counter value
The current counter status of the
operating hours counter can be
transmitted actively to the bus via the
"value operating hours counter"
communication object.
cyclical The counter status is transmitted
cyclically to the bus and when there is a
change. The cycle time is configured
generally on the parameter page
"General".
after change by interval
value
The counter status is transmitted to the
bus only when there is a change.
Counting value interval
(1…65535 h)
1...65535 The interval of the counter value is set
here for automatic transmission. The
current counter status is transmitted to
the bus after the time value configured
here.
This parameter is only visible if the
parameter "Automatic transmission of
the number value" is set to "Change on
interval value".
h Ax - Assignments
Assignment to the
function "Pump control"
?
no
yes
The heating actuator allows switching
activation of the circulation pump of a
heating or cooling circuit via a 1-bit KNX
telegram. Pump control is a global
function of the heating actuator. It is
enabled and configured on the "Valve /
pump" parameter page. The parameter
"Assignment to the function 'Pump
control' ?" specifies whether the
appropriate valve output is included in
the pump control.
The presetting of the parameter
depends on the enabling function of the
function. If pump control is not enabled
on the "Valve / pump" parameter page,
then the ETS will permanently set this
parameter to "No". In this case,
assignment is not possible. If pump
control is enabled, this parameter is
preset to "Yes".
Page 131 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
Assignment to the "Heat
requirement" function ?
no
yes
The heating actuator can even evaluate
the command values of its outputs and
make general heat requirement
available in the form of limiting value
monitoring with hysteresis (1 bit,
switching). Using a KNX switch actuator,
this allows the energy-efficient activation
of burner and boiler controllers with
suitable control inputs (e.g. requirement-
orientated switch-over between the
reduction and comfort setpoint in a
central combi boiler). The heat
requirement control function is a global
function of the heating actuator. It is
enabled and configured on the "Valve /
pump" parameter page. The parameter
"Assignment to the 'Heat requirement'
function ?" specifies whether the
appropriate valve output is included in
the heat requirement control.
The presetting of the parameter
depends on the enabling function of the
function. If the heat requirement function
is not enabled on the "Valve / pump"
parameter page, then the ETS will
permanently set this parameter to "No".
In this case, assignment is not possible.
If the heat requirement function is
enabled, this parameter is preset to
"Yes".
Assignment to the
"Largest command
value" function ?
no
yes
The actuator can determine the largest
constant command value and forward it
to another bus device (e.g. suitable
calorific furnaces with integrated KNX
control or visualisation). In the "Yes"
setting, the heating actuator evaluates
all the active 1-byte command values of
the valve outputs and, optionally, the
externally received largest command
value (object "External largest command
value") and transmits the largest
command value via the "Largest
command value" object. In the case of
valve outputs configured in the ETS to
the command value data formats
"Switching (1-bit)" or "Constant (1-byte)
with command value limiting value",
there is no evaluation of the command
values preset via the bus.
Exception: It may also occur with such
command value outputs that a constant
command value is active (e.g. after
bus/mains voltage return or a forced
position and emergency operation or
manual operation). In this case, this
constant command value is also
included in the calculation of the largest
Page 132 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

Art. No. MTN6730-0001
command value until the named
functions with a higher priority are exited
or a new command value telegram is
received via the bus, overriding the
constant command value at the valve
output.
The "Largest command value" function
is a global function of the heating
actuator. It is enabled and configured on
the "Valve / pump" parameter page. The
"Assignment to the 'Largest command
value' function ?" parameter specifies
whether the appropriate valve output is
included in the evaluation of the largest
command value.
The presetting of the parameter
depends on the enabling function of the
function. If the "Largest command value"
function is not enabled on the "Valve /
pump" parameter page, then the ETS
will permanently set this parameter to
"No". In this case, assignment is not
possible. If the "Largest command
value" function is enabled, then the
parameter can be edited. It is also then
present to "No".
Assignment to service
mode ?
no
yes
Service mode allows the bus-controlled
locking of all or some valve outputs for
maintenance or installation purposes. If
service mode is active, actuators can be
moved to a defined position (completely
open or closed) and locked against
activation by command value telegrams.
Service mode is a global function of the
heating actuator. It is enabled and
configured on the "General" parameter
page. The parameter "Assignment to
service mode ?" specifies whether the
affected valve output is influenced by
the service mode.
The presetting of the parameter
depends on the enabling function of the
function. If service mode is not enabled
on the "General" parameter page, then
the ETS will permanently set this
parameter to "No". In this case,
assignment is not possible. If service
mode is enabled, this parameter is
preset to "Yes".
Page 133 of 134
Software "Switch PWM 2068 / 1.0"
Parameters

5 Appendix
5.1 Index
A
anti-sticking protection............................56
as-delivered state................................. 100
C
Collective feedback.................................45
Combined valve status........................... 83
command value limit............................... 78
Command value status...........................80
cycle time................................................70
E
ETS search paths................................... 21
F
First Open function................................. 15
H
Heat requirement control........................ 50
I
intelligent valve rinsing............................94
L
Largest command value......................... 52
O
operating hours counter..........................96
overload.................................................. 86
P
pump controller....................................... 55
S
Safe-state mode..................................... 23
Service mode..........................................42
short-circuit............................................. 86
Short-circuit / overload display............... 14
Status indication..................................... 14
T
Testing cycle...........................................86
V
valve direction of action.......................... 60
valve rinsing............................................92
Art. No. MTN6730-0001 Page 134 of 134
Appendix