Table of Contents
- Legal information
- Safety information
- Table of Contents
- 1 Information on the product
- 2 For your safety
- 3 Fitting and electrical connection
- 4 Commissioning
- 5 Application programs
- 6 Operation
- 7 Scope of functions
- 8 Notes on software
- 9 Description of channel-independent functions
- 9.1 Parameter configuration for valve outputs
- 9.2 Priorities for valve outputs
- 9.3 Manual control for valve outputs
- 9.4 Service mode for valve outputs
- 9.5 Collective feedback for valve outputs
- 9.6 Summer/winter switch-over for valve outputs
- 9.7 Heat requirement and largest command value for valve outputs
- 9.8 Pump control for valve outputs
- 9.9 Failure of the valve operating voltage
- 9.10 Internal group communication
- 9.11 Channel-independent parameters
- 9.12 Objects for device functions
- 10 Channel-orientated functional description for valve outputs
- 10.1 Valve direction of action
- 10.2 Reset behaviour
- 10.3 Data formats for command values
- 10.4 Cycle time
- 10.5 forced position
- 10.6 Cyclical command value monitoring / emergency operation
- 10.7 Command value limit
- 10.8 Status functions
- 10.9 Short-circuit and overload detection
- 10.10 Valve rinsing
- 10.11 Operating hours counter
- 10.12 Parameter for valve outputs
- 10.13 Objects for valve outputs
- 11 Channel-orientated functional description for controllers
- 11.1 Operating modes and operating mode change-over
- 11.2 Control algorithms and calculation of command values
- 11.3 Adapting the control algorithms
- 11.4 Operating mode switchover
- 11.5 Room temperature measurement
- 11.6 Temperature setpoints
- 11.7 Command value and status output
- 11.8 Disabling functions
- 11.9 Underfloor heating temperature limit
- 11.10 Response after a device reset
- 11.11 Parameters for room temperature controllers
- 11.12 Objects for room temperature controllers
Schneider Electric MTN6730-0002 User Manual
Displayed below is the user manual for MTN6730-0002 by Schneider Electric which is a product in the Electrical Actuators category. This manual has pages.
Related Manuals

SpaceLogic KNX Valve Drive
Controller
Application description
This document describes the ETS software application used to program the device.
MTN6730-0002
11.08.2020
www.se.com
SpaceLogic KNX

SpaceLogic KNX Valve Drive Controller
2 | MTN6730-0002 11.08.2020
Legal information
The Schneider Electric brand and any trademarks of Schneider Electric SE and its
subsidiaries referred to in this guide are the property of Schneider Electric SE or its
subsidiaries. All other brands may be trademarks of their respective owners.
This guide and its content are protected under applicable copyright laws and fur-
nished for informational use only. No part of this guide may be reproduced or trans-
mitted in any form or by any means (electronic, mechanical, photocopying, record-
ing, or otherwise), for any purpose, without the prior written permission of
Schneider Electric.
Schneider Electric does not grant any right or license for commercial use of the
guide or its content, except for a non-exclusive and personal license to consult it on
an “as is” basis. Schneider Electric products and equipment should be installed,
operated, serviced, and maintained only by qualified personnel.
As standards, specifications, and designs change from time to time, information
contained in this guide may be subject to change without notice.
To the extent permitted by applicable law, no responsibility or liability is assumed
by Schneider Electric and its subsidiaries for any errors or omissions in the inform-
ational content of this material or consequences arising out of or resulting from the
use of the information contained herein.
SpaceLogic KNX Valve Drive Controller
3 | MTN6730-0002 11.08.2020
Safety information
Read these instructions carefully and look at the equipment to become familiar with
the device before trying to install, operate, service, or maintain it. The following
special messages may appear throughout this manual or on the equipment to warn
of potential hazards or to call attention to information that clarifies or simplifies a
procedure.
The addition of either symbol to a “Danger” or “Warning” safety label
indicates that an electrical hazard exists which will result in personal
injury if the instructions are not followed.
This is the safety alert symbol. It is used to alert you to potential personal
injury hazards. Obey all safety messages that accompany this symbol to
avoid possible injury or death.
DANGER!
DANGER
indicates a hazardous situation which, if not avoided, will result in death or serious
injury.
WARNING!
WARNING
indicates a hazardous situation which, if not avoided, could result in death or seri-
ous injury.
CAUTION!
CAUTION
indicates a hazardous situation which, if not avoided, could result in minor or mod-
erate injury
Additonal notes
You will find additional information here to make your work easier.

Table of Contents
SpaceLogic KNX Valve Drive Controller
4 | MTN6730-0002 11.08.2020
Table of Contents
1Information on the product....................................................................................6
1.1 Product catalogue ................................................................................... 6
1.2 Function................................................................................................... 6
1.3 Device components................................................................................. 9
1.4 Delivery state........................................................................................... 9
1.5 Technical data ....................................................................................... 10
2For your safety....................................................................................................12
2.1 Safety instructions ................................................................................. 12
3Fitting and electrical connection .........................................................................13
4Commissioning ...................................................................................................17
5Application programs..........................................................................................18
6Operation............................................................................................................19
6.1 Operating elements ............................................................................... 19
6.2 Status displays and output behaviour ................................................... 19
6.3 Operating modes................................................................................... 22
7Scope of functions ..............................................................................................27
8Notes on software...............................................................................................30
9Description of channel-independent functions....................................................31
9.1 Parameter configuration for valve outputs............................................. 31
9.2 Priorities for valve outputs ..................................................................... 31
9.3 Manual control for valve outputs ........................................................... 32
9.4 Service mode for valve outputs ............................................................. 37
9.5 Collective feedback for valve outputs.................................................... 39
9.6 Summer/winter switch-over for valve outputs........................................ 43
9.7 Heat requirement and largest command value for valve outputs .......... 44
9.8 Pump control for valve outputs.............................................................. 48
9.9 Failure of the valve operating voltage ................................................... 51
9.10 Internal group communication ............................................................... 52
9.11 Channel-independent parameters......................................................... 54
9.12 Objects for device functions .................................................................. 65
10 Channel-orientated functional description for valve outputs...............................69
10.1 Valve direction of action ........................................................................ 69
10.2 Reset behaviour .................................................................................... 69
10.3 Data formats for command values ........................................................ 73
10.4 Cycle time.............................................................................................. 78
10.5 forced position ....................................................................................... 80
10.6 Cyclical command value monitoring / emergency operation ................. 82
10.7 Command value limit............................................................................. 84
10.8 Status functions..................................................................................... 86
10.9 Short-circuit and overload detection...................................................... 92

Table of Contents
SpaceLogic KNX Valve Drive Controller
5 | MTN6730-0002 11.08.2020
10.10 Valve rinsing.......................................................................................... 98
10.11 Operating hours counter...................................................................... 102
10.12 Parameter for valve outputs ................................................................ 106
10.13 Objects for valve outputs..................................................................... 123
11 Channel-orientated functional description for controllers .................................129
11.1 Operating modes and operating mode change-over........................... 129
11.2 Control algorithms and calculation of command values ...................... 131
11.3 Adapting the control algorithms........................................................... 138
11.4 Operating mode switchover................................................................. 140
11.5 Room temperature measurement ....................................................... 147
11.6 Temperature setpoints ........................................................................ 150
11.7 Command value and status output...................................................... 157
11.8 Disabling functions .............................................................................. 163
11.9 Underfloor heating temperature limit ................................................... 163
11.10 Response after a device reset............................................................. 164
11.11 Parameters for room temperature controllers ..................................... 164
11.12 Objects for room temperature controllers............................................ 180

SpaceLogic KNX Valve Drive Controller Product catalogue
6 | MTN6730-0002 11.08.2020
1 Information on the product
1.1 Product catalogue
Product name: SpaceLogic KNX Valve Drive Controller
Use: Actuator
Design: RMD (rail-mounted device)
Art.-no. MTN6730-0002
1.2 Function
General
The heating actuator is used for the activation of electrothermal actuators (ETA) for
heating or cooling systems. It possesses 6 electronic outputs, each of which can si-
lently activate up to 4 (AC 230 V) or 2 (AC 24 V) actuators. Both deenergised
closed and deenergised opened actuators can be connected.
In addition, the actuator contains up to 6 room temperature controllers (RTC),
which are integrated in the device software and which work independently of the
process. The command value outputs of these controllers can be internally linked
to the electronic valve outputs of the actuator, meaning that temperature control
and valve activation can take place using just one bus device, if required. The use
of external room temperature controllers (e.g. push-button sensors with RTC) is
thus not absolutely essential, but is possible as the valve outputs can also be activ-
ated individually via the KNX. The integrated controllers can also transmit com-
mand value telegrams to the KNX and thus activate other heating actuators or fan
coil actuators.
The room temperature is made available to the integrated controllers via separate
communication objects. All the controller functions (e.g. setpoint temperature spe-
cification, operating mode switchover, switchover of the operating mode) are con-
trolled via KNX communication objects (object controller without its own operating
elements), meaning that controller operation is possible via controller extensions or
visualisations.
Functions of the electronic valve outputs
The heating actuator receives 1-bit or 1-byte command value telegrams, transmit-
ted, for example, by external KNX room temperature controllers or by one of the in-
ternal controllers. The actuator controls its valve outputs either in switching form or
with a PWM signal, according to the data format of the command values and the
configuration in the ETS. The cycle time for constant PWM output signals can be
configured separately for each valve output of the heating actuator. This allows in-
dividual adaptation to different actuator types.
On activation with constant command values, an optional command value limit can
be designed, which allows the limitation of received command values at the "Min-
imum" and "Maximum" limits. A minimum command value can be used, for ex-
ample, for the implementation of basic heating or cooling. A maximum command
value allows the limitation of the effective command value range, which usually has
a positive influence on the lifespan of actuators.
The heating actuator possesses a heat requirement and pump controller. This pro-
duces a positive impact on the energy consumption of a housing or commercial
building through the transmission and evaluation of the largest command value in
the heating or cooling system. The information on the largest active command
value can be made available to suitable calorific furnaces with integrated KNX con-

SpaceLogic KNX Valve Drive Controller Function
7 | MTN6730-0002 11.08.2020
troller directly via a KNX telegram (1-byte), for example, to determine the optimum
flow temperature. Alternatively or additionally, the heating actuator can even evalu-
ate the command values of its outputs and make general heat requirement inform-
ation available in the form of limiting value monitoring with hysteresis (1-bit, switch-
ing). Using a KNX switch actuator, this allows the energy-efficient activation of
burner and boiler controllers with suitable control inputs (e.g. requirement-orient-
ated switch-over between the reduction and comfort setpoint in a central combi
boiler).
The heating actuator also allows switching activation of the circulation pump of the
heating or cooling circuit via a 1-bit KNX telegram. When using pump control, the
pump is only switched on by the actuator when at least one command value of the
outputs exceeds a limiting value with hysteresis defined in the ETS. The pump is
switched off when the limiting value is reached or undershot again. This saves
electrical energy, as the pump is only activated by sufficiently large, and thus ef-
fective, command values. Optional cyclical anti-sticking protection prevents the
sticking of the pump, if it has not been switched on by the command value evalu-
ation for a longer period of time.
To prevent calcification or sticking of a valve which has not been activated for
some time, the actuator has an automatic valve rinsing function. Valve rinsing can
be executed cyclically or using a bus command, causing the activated valves to run
through the full valve stroke for a preset period of time. If necessary, the intelligent
valve rinsing can be enabled. In so doing, cyclical rinsing using the full stroke is
only executed when a defined minimum command value limiting value was not ex-
ceeded during actuator operation.
Cyclical monitoring of the command values can be performed as an option. If, dur-
ing active cyclical monitoring, there are no command value telegrams during a pre-
set time, then emergency operation is activated for the affected valve output, for
which a configurable constant PWM command value can be preset. In addition, it is
possible to activate a forced position separately for each output using a 1-bit KNX
object. A defined PWM command value is set at the appropriate output.
Emergency operation and forced position can also be activated automatically in
case of bus voltage failure, after bus / mains voltage return or after an ETS pro-
gramming operation. If necessary, the command values for emergency operation
and the forced position can be influenced by the summer and winter mode of the
actuator, allowing the activation of different heating or cooling levels according to
the season. The actuator permits switchover between summer and winter mode at
any time using a 1-bit object.
The heating actuator possesses comprehensive feedback and status functions.
The active command value can be made available as status information, transmit-
ting either passively or actively, separately for each value output. A combined valve
status allows the collective feedback of various functions of an output in a single 1-
byte bus telegram.
The actuator is able to detect an overload or a short-circuit at the valve outputs
and, in consequence, to protect them against destruction. Outputs which have ex-
perienced a short-circuit or a constant load are deactivated after an identification
period. In this case, a short-circuit or overload signal can be transmitted via a KNX
communication object. The actuator can also signal a failure of the valve voltage
on the KNX.
The switch-on times of the valve outputs can be detected and evaluated separately
by operating hours counters. In addition, service operation is available, which, dur-
ing maintenance or installation, can move all assigned valve drives to a defined po-
sition (completely opened or completely closed) and can lock them against activa-
tion by command value telegrams. Both service mode and the locking status are
preset by a 2-bit forced operation telegram.

SpaceLogic KNX Valve Drive Controller Function
8 | MTN6730-0002 11.08.2020
Function of the room temperature controller
Six controllers are integrated in the device software, which can be used for single-
room temperature control. This allows the temperature to be set in up to 6 rooms or
room areas to specified setpoints through independent control processes. Depend-
ing on the operating mode, current setpoint temperature and room temperature,
using a controller means that a variable for heating or cooling control can be trans-
mitted to the KNX for the control circuit or be forwarded internally to a valve output.
The controller distinguishes between different operating modes (comfort, standby,
night, frost/heat protection) each with their own temperature setpoints for heating
or cooling. For heating and cooling functions, you can select continuous or switch-
ing PI or switching 2-point feedback control algorithms.
In addition to the heating or cooling basic level, activating an additional heater and/
or cooling unit means that an additional heating or cooling unit can be used. In this
connection, you can set the temperature setpoint difference between the basic and
the additional level by a parameter in the ETS. For major deviations between the
temperature setpoint and the actual temperature, you can activate this additional
level to heat up or cool down a room faster. You can assign different control al-
gorithms to the basic and additional stages.
For each controller, the room temperatures are then detected by one or possibly
two external KNX temperature sensors (e.g. push-button sensors with temperature
measurement).
Operation, mounting and electrical connection
The operating elements (4 push-buttons) on the front panel of the device permit in-
fluencing of the electronic outputs of the actuator through manual operation, even
without KNX bus voltage or in a non-programmed state (switch on and off / PWM).
This feature permits a fast function check of the connected actuators. Moreover,
the statuses of the outputs in case of bus voltage failure or bus or mains voltage
return and after ETS programming can be set separately.
The device has a mains voltage connection that is independent of the valve out-
puts for supplying the device electronics of the manual operation and integrated
bus coupling unit. The device electronics and bus coupling unit are also supplied
from the bus coupling unit so that an ETS programming operation or manual oper-
ation is also possible even if the mains voltage is not connected or is switched off.
As long as the bus voltage is connected and ready for operation, no power is
drawn from the device's internal power supply unit. This saves electrical energy.
The valve outputs possess a separate connection for the supply of the connected
actuators (AC 24 V or AC 230 V).
The device is designed for mounting on DIN rails in closed compact boxes or in
distributors in fixed installations in dry interior rooms.

SpaceLogic KNX Valve Drive Controller Device components
9 | MTN6730-0002 11.08.2020
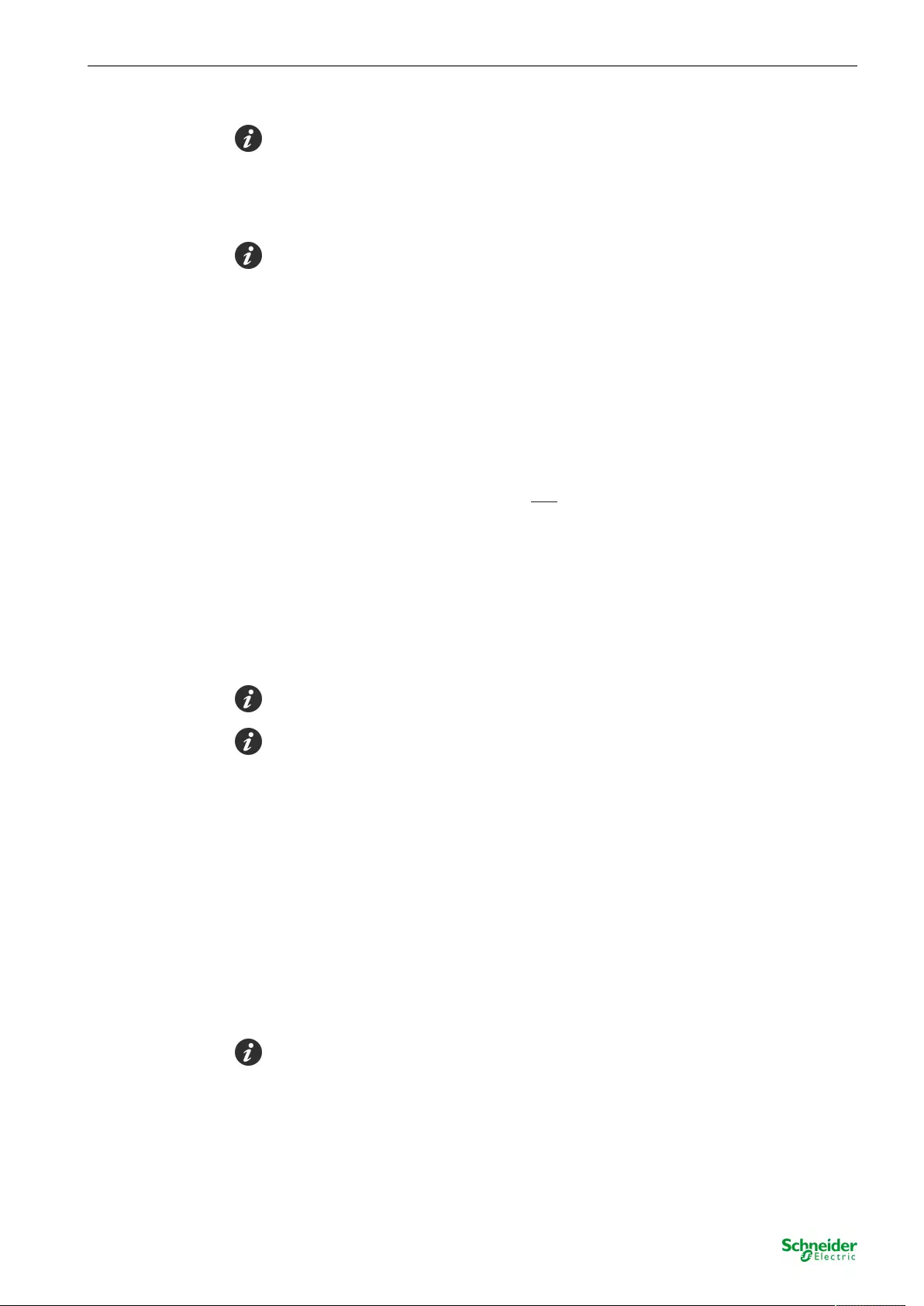
1.3 Device components
Image1: Device components
(1) Connection for the supply of electrothermal actuators (AC 230 V or AC 24
V)
(2) Button field for manual operation
(3) Programming button and LEDs
(4) KNX connection
(5) Connection for mains voltage supply (AC 230 V)
(6) Status LEDs for outputs
(7) Connections for electrothermal actuators
1.4 Delivery state
In the as-delivered state, the actuator is passive, i.e. no telegrams are transmitted
to the bus. The outputs can, however, be activated by manual operation on the
device, if the bus or mains voltage and the valve voltage supply are on. In the
manual control mode, no feedback telegrams are sent to the bus. Other functions
of the actuator, such as the room temperature controllers, are deactivated.
The device can be programmed and put into operation via the ETS. The physical
address is preset to 15.15.255
Furthermore, the device has been configured at the factory with the following char-
acteristics (all valve outputs)...
– Valve direction of action: deenergised closed
– Pulse width modulation on "Open valve": 50 %
– Cycle time: 20 minutes
– Behaviour on bus failure: Activate command value for emergency operation
(30 %), if mains and valve voltage supply available. If the bus and mains
voltage fail, all the valve outputs switch OFF.
– Behaviour after bus voltage return: All the valves close (valve outputs switch
OFF).
The as-delivered state cannot be restored by unloading the application program
with the aid of the ETS. When the application program is removed, all the valve out-
puts remain permanently switched off. The manual operation remains without func-
tion in this case.

SpaceLogic KNX Valve Drive Controller Technical data
10 | MTN6730-0002 11.08.2020
1.5 Technical data
General
Ambient temperature -5 ... +55 °C
Storage/transport temperature -25 ... +70 °C
Fitting width 72 mm / 4 module
Test mark KNX/EIB
Standby power max. 0.4 W
Power loss max. 1 W
KNX supply
KNX medium TP
Commissioning mode S-mode
Rated voltage KNX DC 21 ... 32 V SELV
Power consumption KNX max. 250 mW
Device power supply AC 230 V (L, N)
Rated voltage AC 110 ... 230 V ~
Mains frequency 50 / 60 Hz
Power supply of valve outputs AC 230 V
Rated voltage AC 230 V~
Power supply of valve outputs AC 24 V
Rated voltage AC 24 V ~
Valve outputs
Contact type Semi-conductor (Triac), ε
Switching voltage AC 24 / 230 V ~
Switching current 5 ... 160 mA
Switch-on current AC 230 V max. 1.5 A (2 s)
Switch-on current AC 24 V max. 0.3 A (2 min)
Number of drives per output
230 V drives max. 4
24 V drives max. 2
Connections
Connection mode Screw terminal
Connection type for bus device connection terminal
single stranded 0.5 ... 4 mm²
Finely stranded without conductor sleeve 0.5 ... 4 mm²

SpaceLogic KNX Valve Drive Controller Technical data
11 | MTN6730-0002 11.08.2020
Finely stranded with conductor sleeve 0.5 ... 2.5 mm²
SpaceLogic KNX Valve Drive Controller Safety instructions
12 | MTN6730-0002 11.08.2020
2 For your safety
DANGER!
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
Safe electrical installation must be carried out only by skilled professionals. Skilled
professionals must prove profound knowledge in the following areas:
■ Connecting to installation networks
■ Connecting several electrical devices
■ Laying electric cables
■ Connecting and establishing KNX networks
■ Safety standards, local wiring rules and regulations
Failure to follow these instructions will result in death or serious injury.
2.1 Safety instructions
Electrical devices may only be mounted and connected by electrically
skilled persons.
Serious injuries, fire or property damage possible. Please read and follow manual
fully.
Danger of electric shock. Always disconnect before carrying out work on the device
or load. In so doing, take all the circuit breakers into account, which support dan-
gerous voltages to the device and or load.
Danger of electric shock. Device is not suitable for disconnection from supply
voltage. The load is not electrically isolated from the mains even when the device
is switched off.
These instructions are an integral part of the product, and must remain with the
end customer.
SpaceLogic KNX Valve Drive Controller
13 | MTN6730-0002 11.08.2020
3 Fitting and electrical
connection
DANGER!
Electrical shock on contact with live parts in the installation environment.
Electrical shocks can be fatal.
■ Before working on the device, disconnect the power supply and cover up
live parts in the working environment.
Fitting the device
■ Snap onto a suitable DIN rail. The screw terminals of the valve outputs
should be at the top.
A KNX data rail is not required.
Observe the temperature range (see Technical Data) and ensure sufficient cooling,
if necessary.
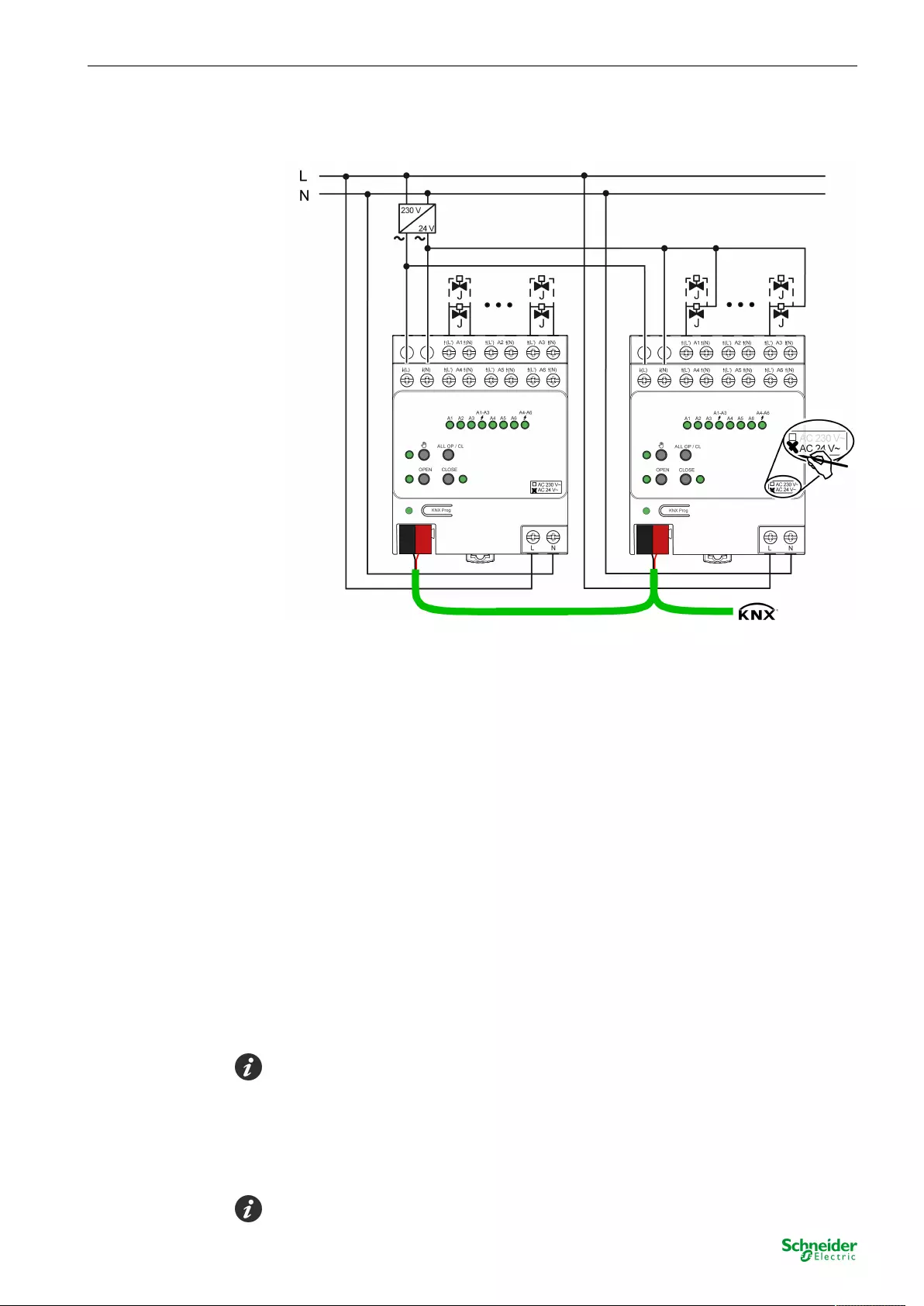
Connect the device for AC 230 V actuators
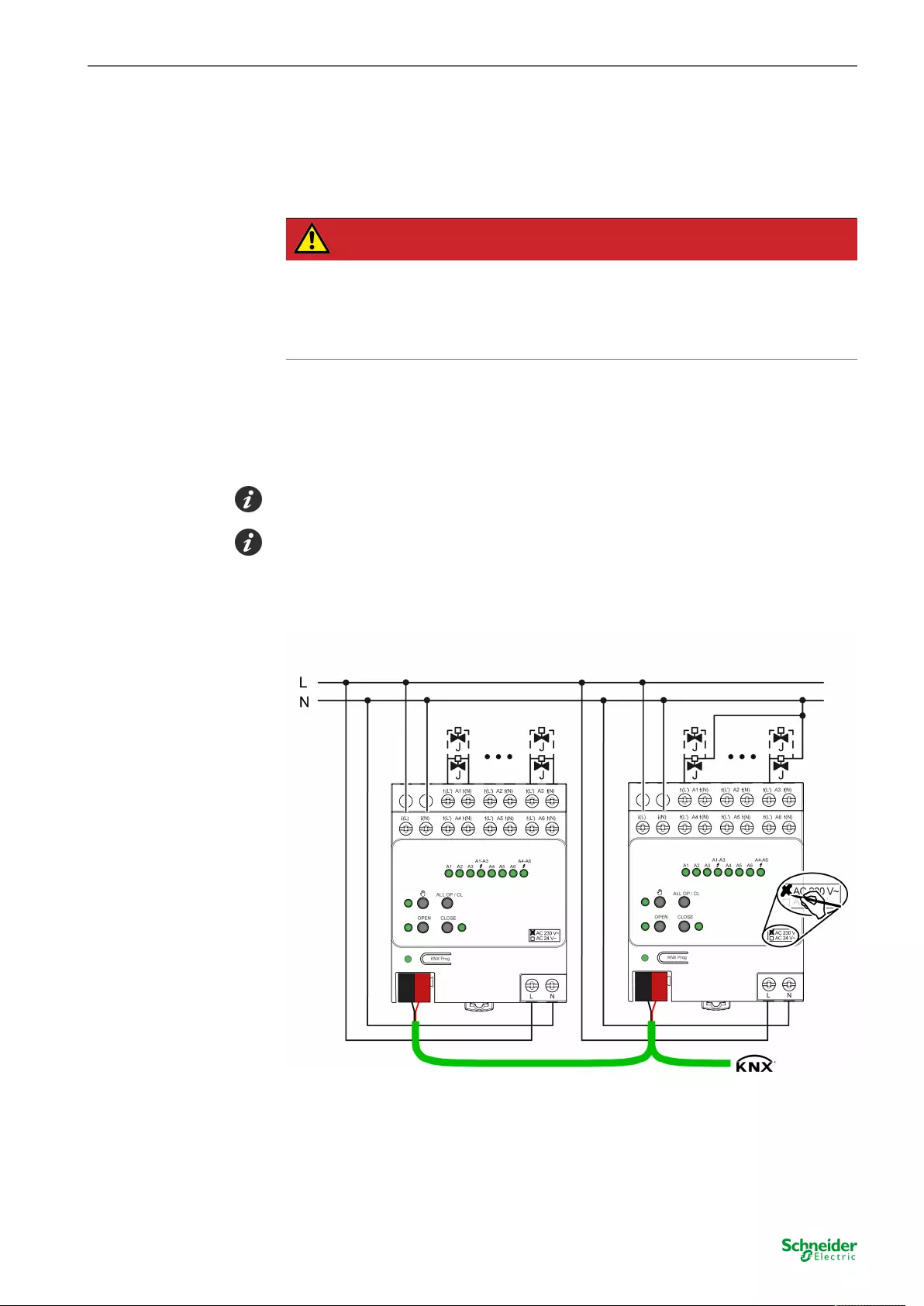
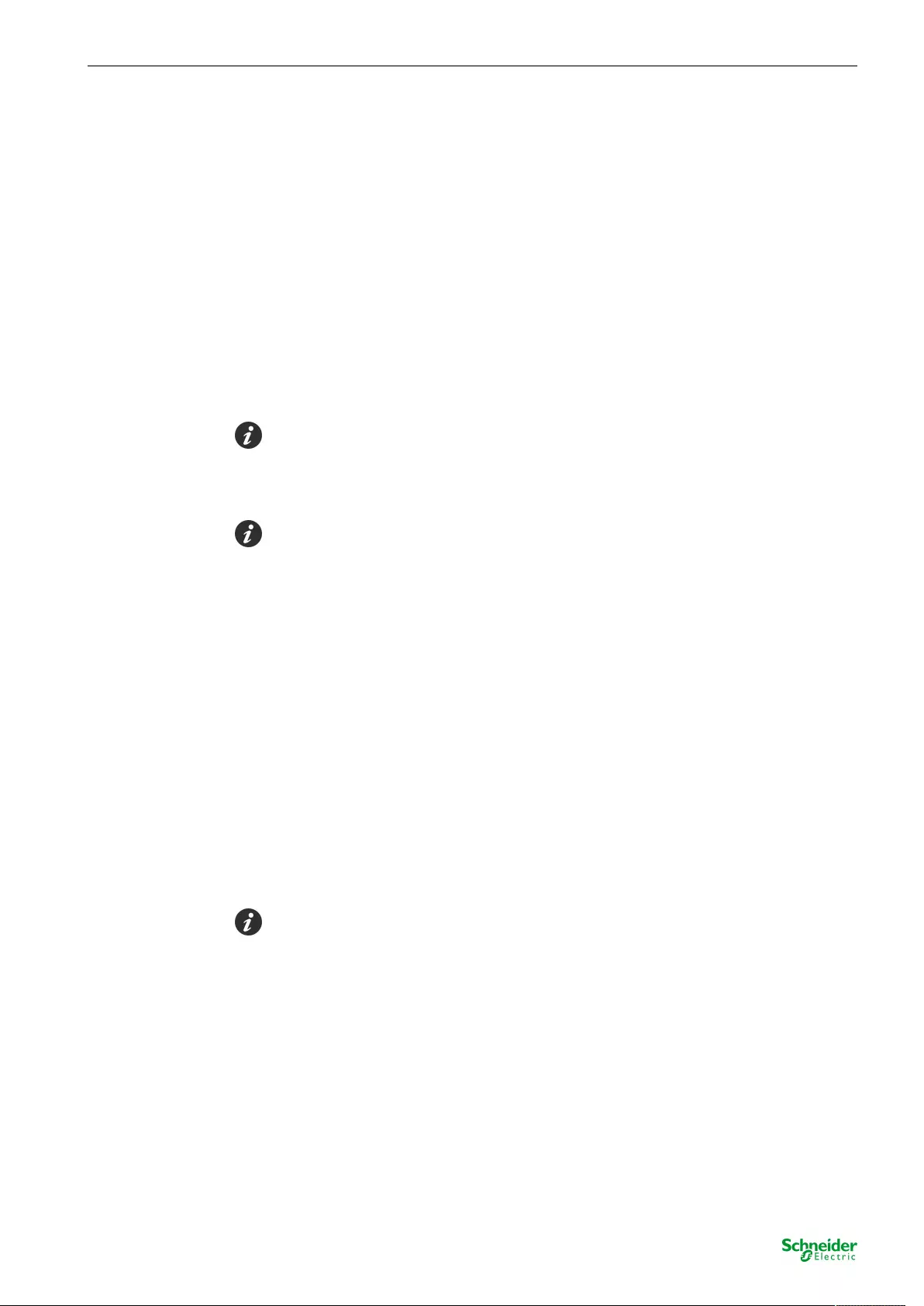
Image2: Connection for AC 230 V actuators (connection examples)
Left: Neutral conductor of the actuators run separately to the actuator /
Right: Shared neutral conductor for actuators
Only connect AC 230 V actuators to all the outputs.
SpaceLogic KNX Valve Drive Controller
14 | MTN6730-0002 11.08.2020
Only connect actuators with the same characteristics to each output (deenergised
closed/opened).
Do not connect unsuitable loads (incandescent lamps, motorised actuators, signal
devices, etc.).
If possible, connect actuators for environments with increased fail-safety require-
ments to the outputs A1 and A4. During overload detection, these are switched off
last.
Do not exceed the maximum number of "4" actuators per output.
Observe the technical data of the valve drives used.
■ Connect the AC 230 V valve drives according to the connection diagram
(see figure 2). The neutral conductors of the actuators can either be con-
nected directly to the N terminals of the outputs of the heating actuator (left-
hand connection example) or, alternatively, jointly with a suitable N potential
(e.g. N conductor terminal in the distributor) (right-hand connection ex-
ample). It is not absolutely necessary to connect the neutral conductor of
the actuators directly to the actuator.
The neutral conductor terminals of the valve outputs are bridged internally in the
device. Do not connect the neutral conductor from the output terminals through to
additional devices in the distribution board or to other consumers. Only use the
neutral conductor terminals of the outputs for the connections of the actuators of an
actuator.
■ Connect the supply (mains voltage AC 230 V) for the actuators to the ter-
minals 8(L) and 8(N) (1).
Do not connect direct current.
■ On the device label, note the type of supply "AC 230 V" with a permanent
marker.
■ Connecting the mains voltage to the terminals L N (5).
The neutral conductor connection of the mains connection terminal is independent
of the N terminals of the valve outputs.
■ Connect bus line with device connection terminal.
SpaceLogic KNX Valve Drive Controller
15 | MTN6730-0002 11.08.2020
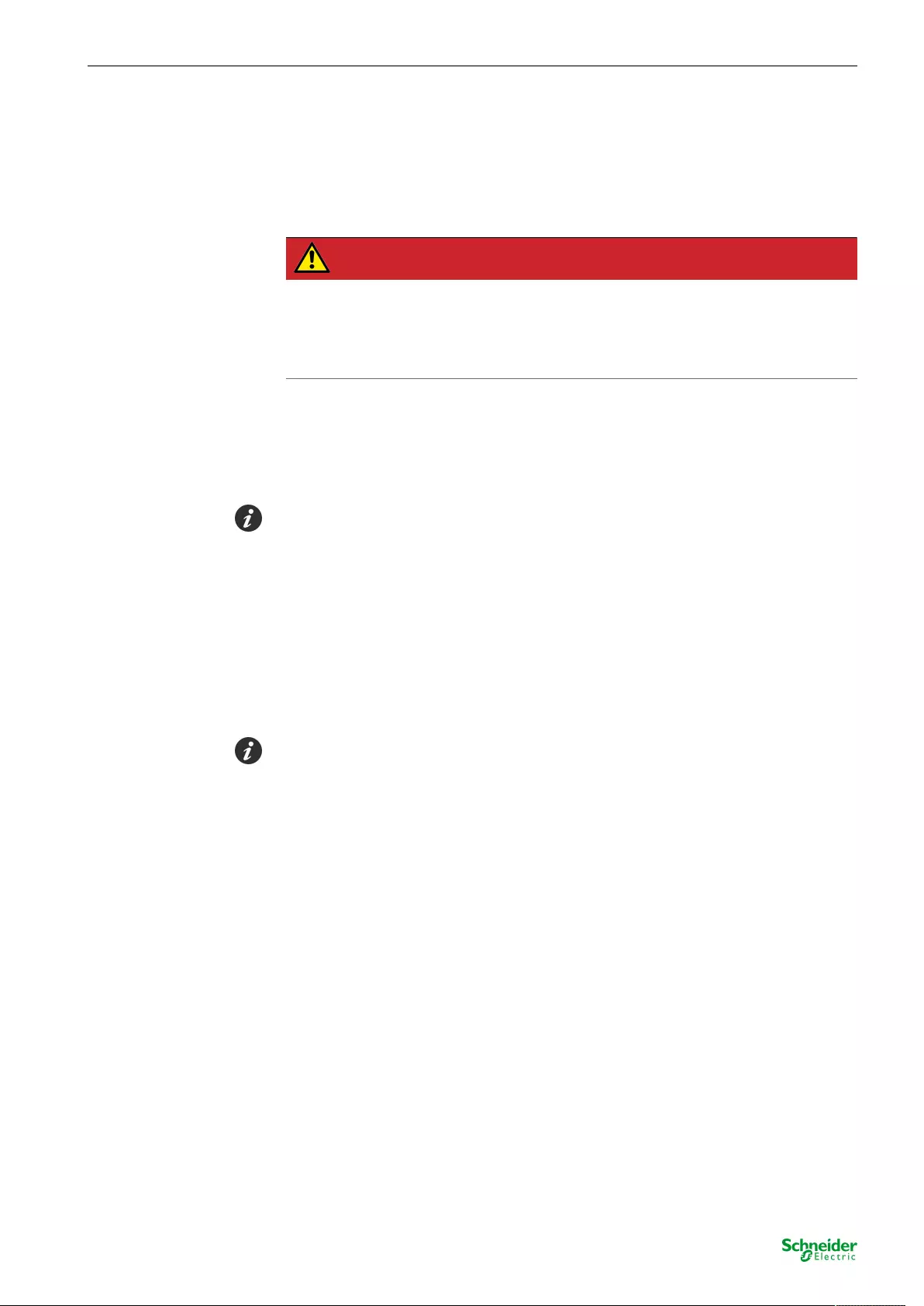
Connect the device for AC 24 V actuators
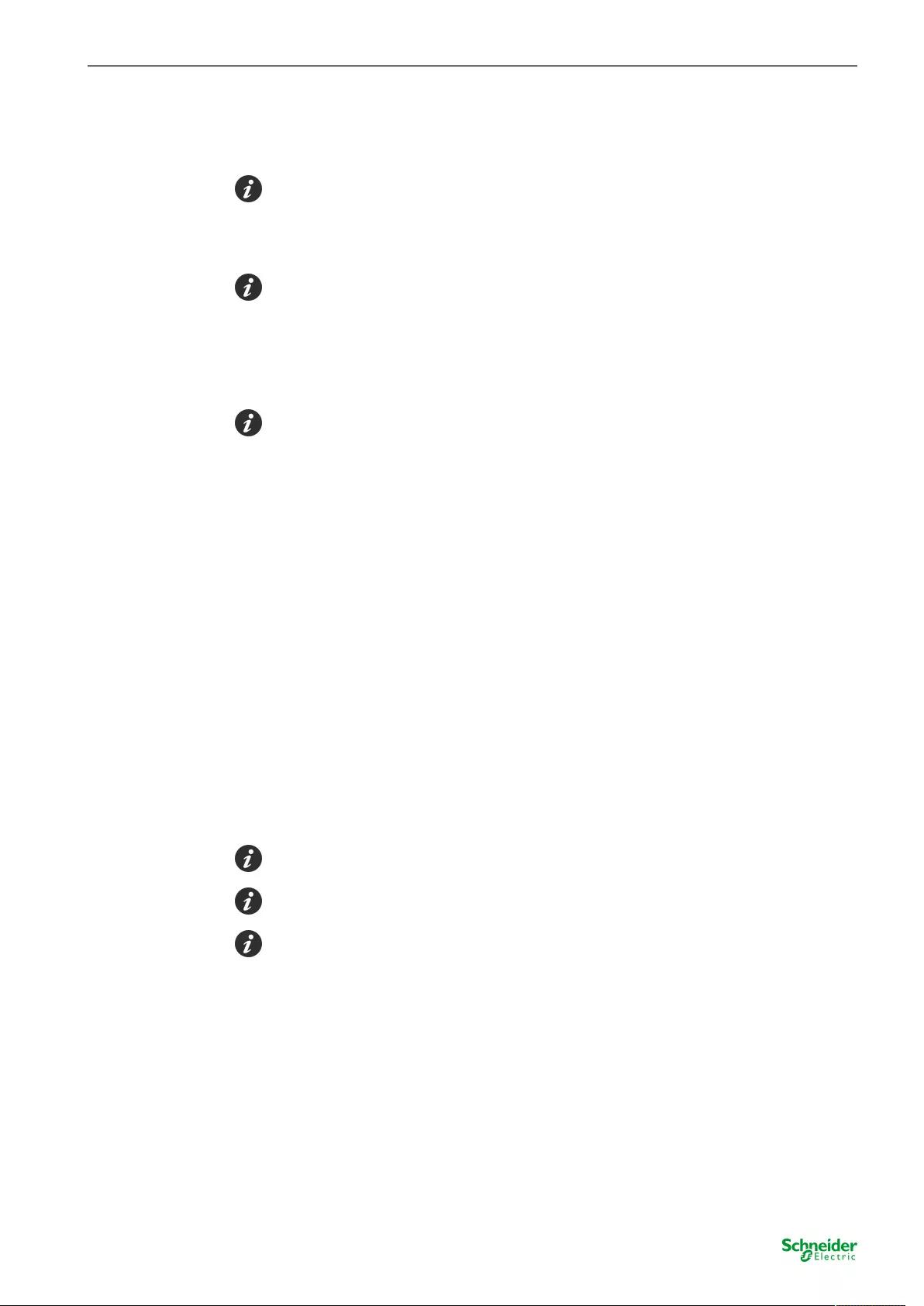
Image3: Connection for actuators AC 24 V
Left: Isolated connection of the actuators, separately on the actuator /
Right: Shared conductor for actuators
Only connect AC 24 V actuators to all the outputs.
Only connect actuators with the same characteristics to each output (deenergised
closed/opened).
Do not connect unsuitable loads (incandescent lamps, motorised actuators, signal
devices, etc.).
If possible, connect actuators for environments with increased fail-safety require-
ments to the outputs A1 and A4. During overload detection, these are switched off
last.
Do not exceed the maximum number of "2" actuators per output.
Observe the technical data of the valve drives used.
■ Connect the AC 24 V valve drives according to the connection diagram
(see figure 3). It is possible to connect the actuators individually and directly
with the terminals of the outputs of the heating actuator (left-hand connec-
tion example) or, alternatively, using a shared conductor (right-hand con-
nection example).
The terminals of the valve outputs indicated with "(N)" are bridged internally in the
device. The terminals may only be used for the connection of the actuators of an
actuator. Never connect N potential (mains voltage)!
■ Connect the supply for the actuators (AC 24 V) to the terminals 8(L) and
8(N) (1). In so doing, use a low voltage AC 24 V from a suitable power sup-
ply (transformer, mains power supply).
Do not connect direct current.

SpaceLogic KNX Valve Drive Controller
16 | MTN6730-0002 11.08.2020
■ On the device label, note the type of supply "AC 24 V" with a permanent
marker.
■ Connect mains voltage AC 230 V to the terminals L N (5).
The neutral conductor connection of the mains connection terminal is independent
of the N terminals of the valve outputs.
■ Connect bus line with device connection terminal.
SpaceLogic KNX Valve Drive Controller
17 | MTN6730-0002 11.08.2020
4 Commissioning
After mounting of the actuator and connection of the bus line, the mains power
supply, the power supply of the actuators and of all electrical loads, the device can
be put into operation. The following procedure is generally recommended...
DANGER!
Electrical shock on contact with live parts in the installation environment.
Electrical shocks can be fatal.
■ Before working on the device, disconnect the power supply and cover up
live parts in the working environment.
Commissioning with the ETS
■ Switch on the bus voltage. Make sure that the bus voltage is available inter-
ruption free during the commissioning.
The device has a mains voltage connection that is independent of the valve outputs
for supplying the device electronics of the manual operation and integrated bus
coupling unit. The device electronics and bus coupling unit are also supplied from
the bus coupling unit so that an ETS programming operation or manual operation is
also possible even if the mains voltage is not connected or is switched off. As long
as the bus voltage is connected and ready for operation, no power is drawn from
the device's internal power supply unit. This saves electrical energy.
■ Configure and program the physical address with the help of the ETS.
■ Download the application data with the ETS.
The device is ready for operation.
When the mains supply is on, the valve outputs of the actuator can be switched via
manual operation, even if there is no bus voltage or if the actuator is not yet pro-
grammed. Due to this feature, the actuators connected to the individual outputs can
be checked for proper functioning already during construction site operation.
Number of communication objects: 308
(max. object number 738 - gaps in
between)
Number of addresses (max.): 760
Number of assignments (max.): 760

SpaceLogic KNX Valve Drive Controller
18 | MTN6730-0002 11.08.2020
5 Application programs
ETS search paths: 7.1 Heating/Single Room Thermostat / 7.1.2 Heating/Switch
actuator / SpaceLogic KNX Ventilantriebsregler
Application:
Name Valve Drive Controller 2073/1.0
Version: 1.1 for ETS4 Version 4.2 onwards and ETS5
from mask version SystemB (07B0)
Summarized de-
scription
Multifunctional heating actuator application:
Activation of up to 6 valve outputs for electrothermal actuat-
ors. Optionally with room temperature control through 6 integ-
rated room temperature controllers. With manual control.
SpaceLogic KNX Valve Drive Controller Operating elements
19 | MTN6730-0002 11.08.2020
6 Operation
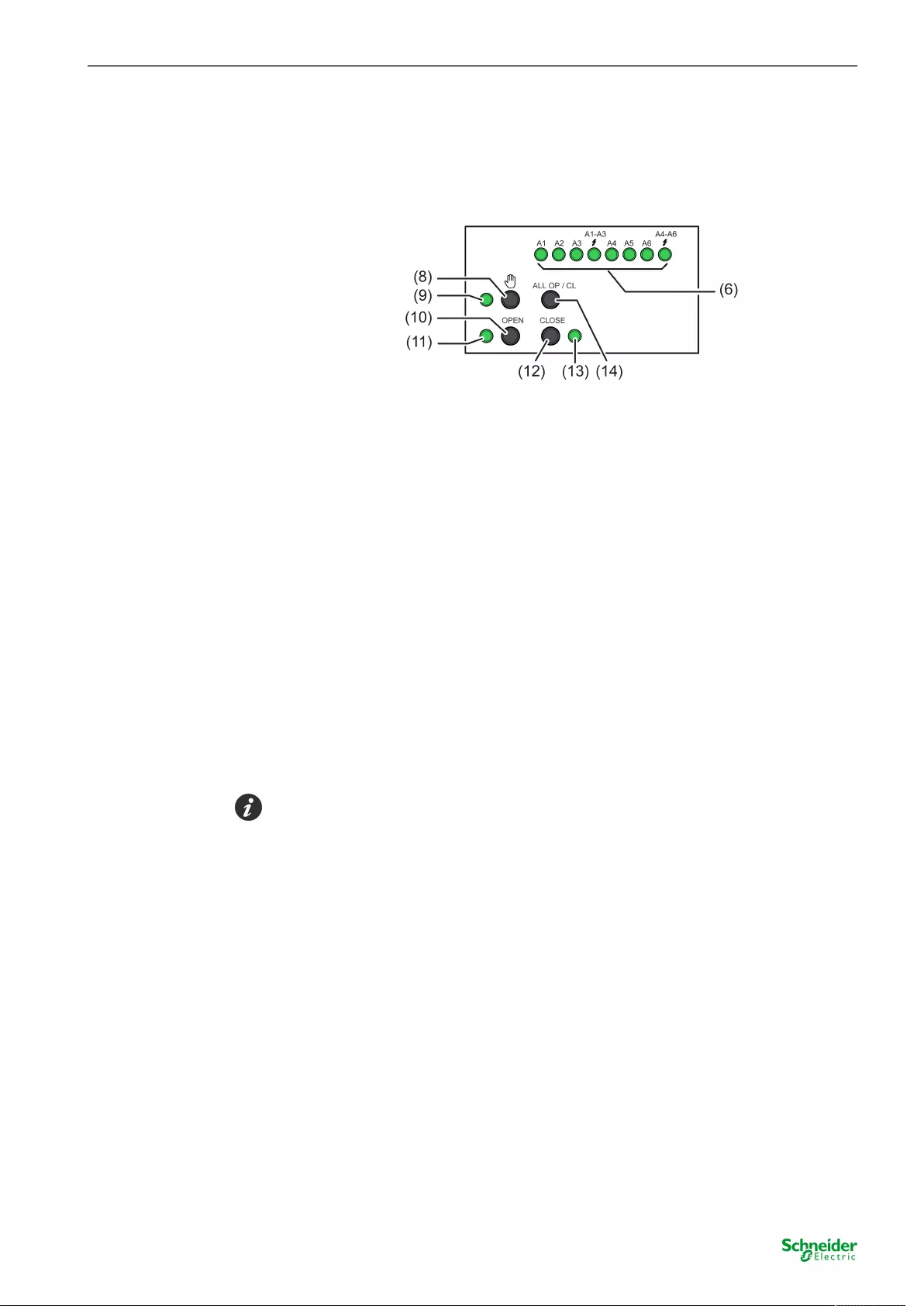
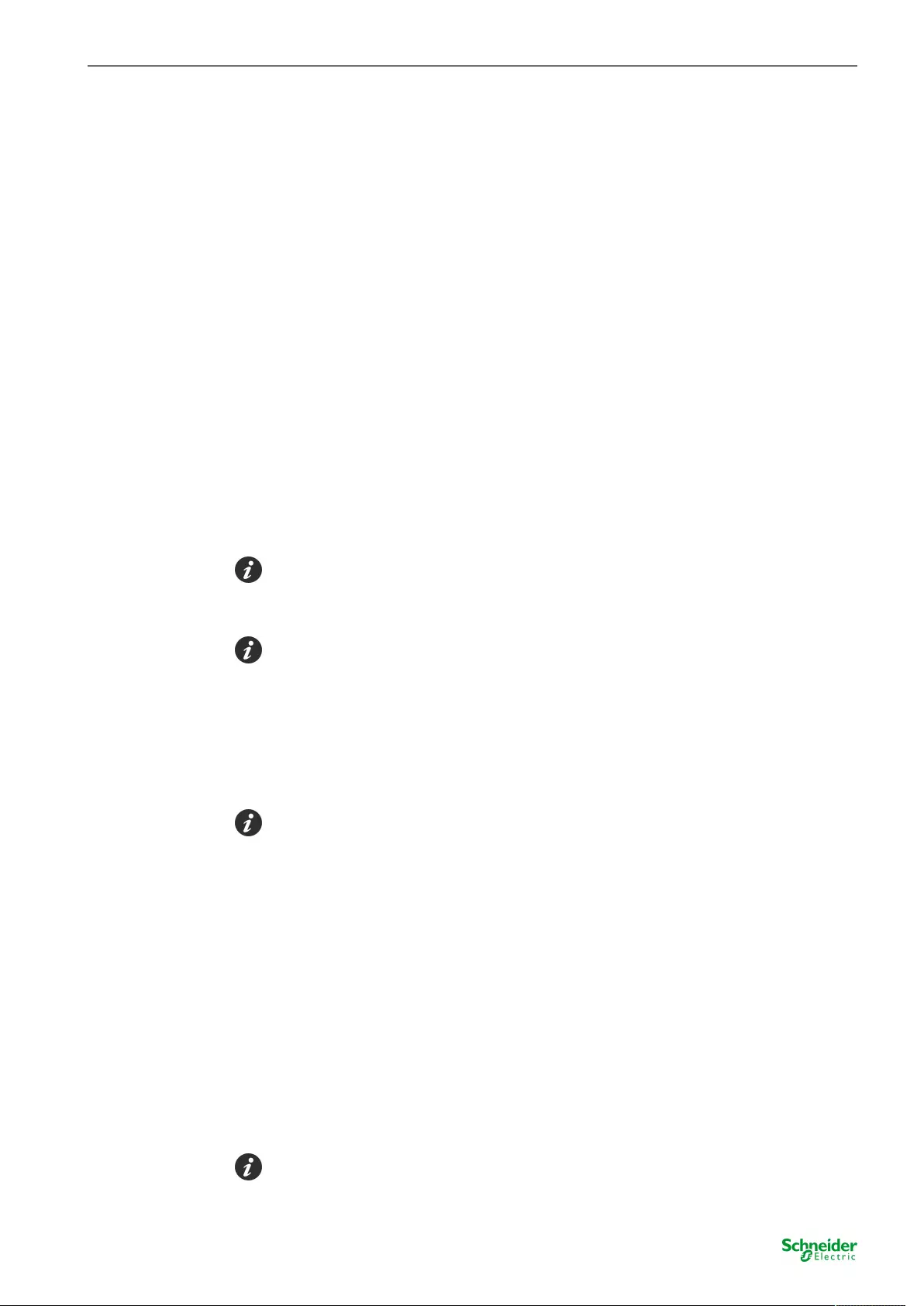
6.1 Operating elements
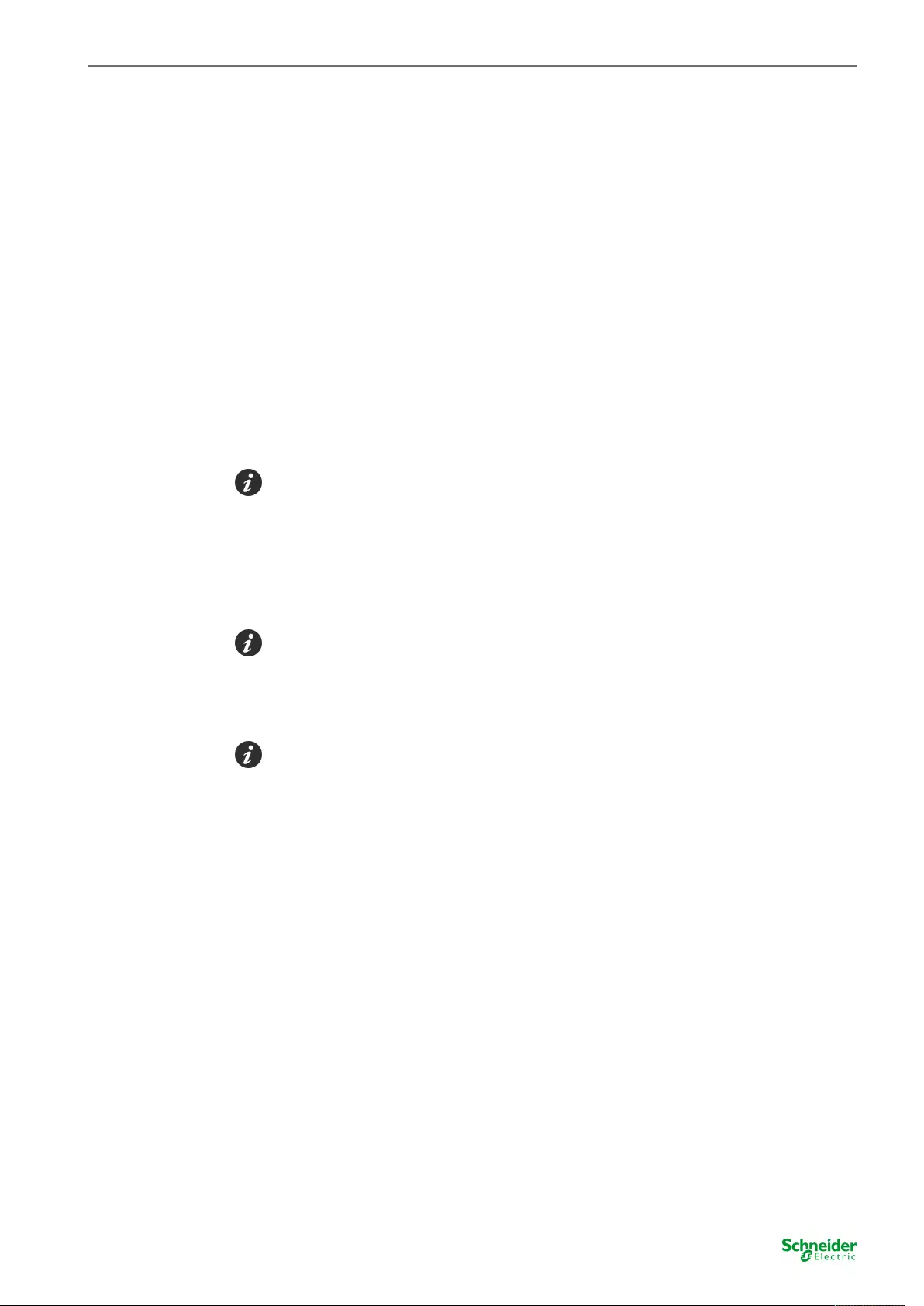
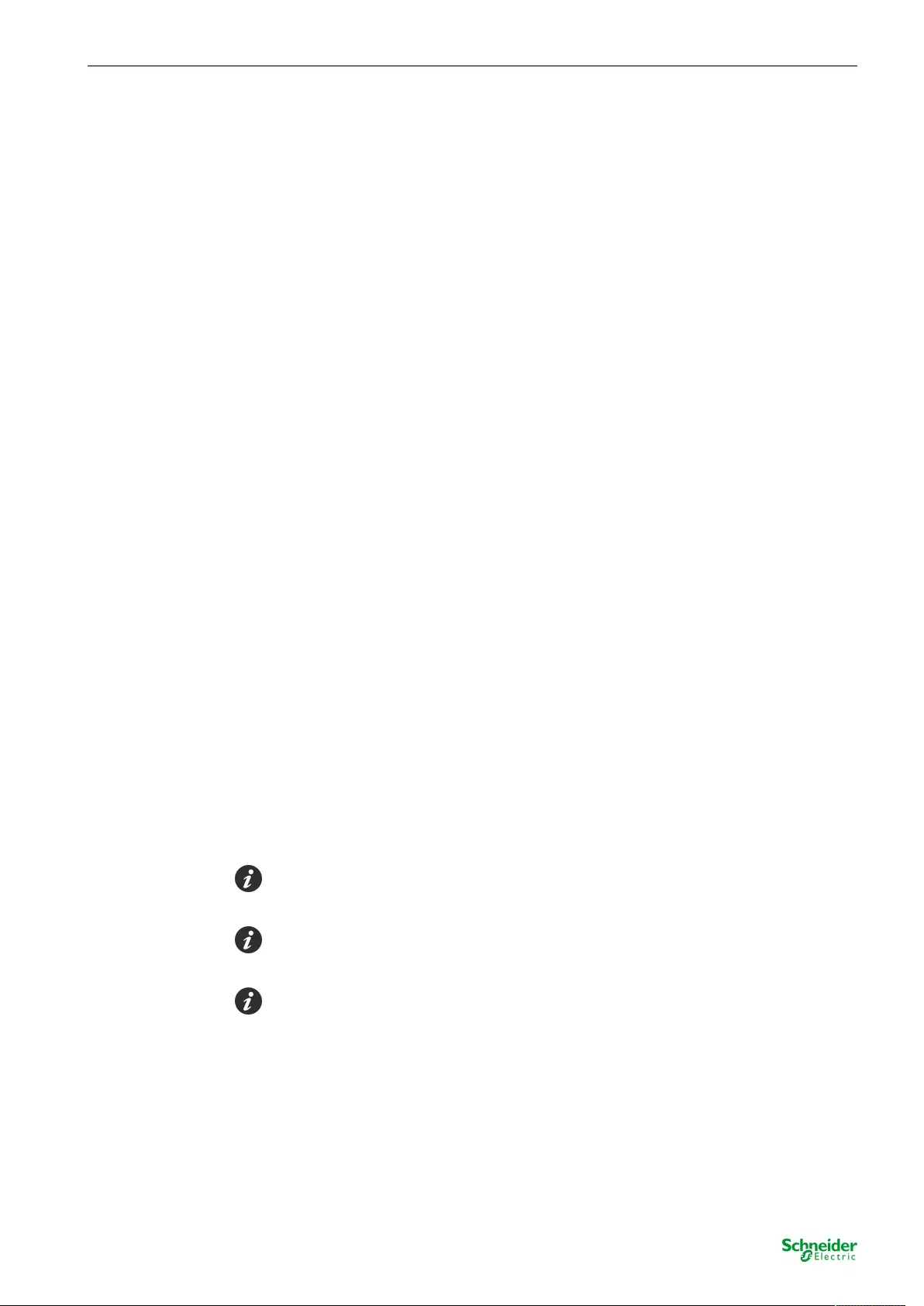
Image4: Controls and indicators on the front panel of the device
(6) A1...A6: Status LEDs of the valve outputs (LEDs light up when outputs are
energised)
ŋA1-A3, ŋA4-A6: Display "Overload/short-circuit" for appropriate output
group
(8) Buttonc:Activation / deactivation of manual control
(9) LED c: Indicates permanent manual operation when ON.
(10) OPEN button: Open valve (configured valve direction of action is taken
into account)
(11) OPEN LED: When ON in manual operation, signals an opened or opening
valve
(12) CLOSE button: Close valve (configured valve direction of action is taken
into account)
(13) CLOSE LED: When ON in manual operation, signals a closed or closing
valve
(14) ALL OP / CL button: Central operating function for all valve outputs. Open
and close all the valves alternately.
OPEN (10) and CLOSE (13) LEDs: The LEDs light up statically during manual op-
eration, showing the valve status set or to be set (valve is closed or closing / valve
is opened or opening). Even on valve outputs working with an 8-bit command value
(PWM), the LEDs display the logical valve state statically in the same way. The
LEDs do not signal the dynamic switch-on and switch-off phases of the pulse width
modulation.
If no valve voltage is connected or switched on at the terminals 8(L) and 8(N), then
the LEDs are also always switched off, even if bus voltage or mains voltage is
available (terminals L N), as the valve outputs cannot be energised.
6.2 Status displays and output behaviour
Status indication
The Status LEDs A1...A6 show whether the current flow is switched on or switched
off at the appropriate output. The connected heating or cooling valves open and
close according to their characteristics.

SpaceLogic KNX Valve Drive Controller Status displays and output behaviour
20 | MTN6730-0002 11.08.2020
Pilot valve LED ON LED OFF
Deenergised closed Output energised
Valve opened / Opening
phase
Active heating or cooling
Output not energised
Valve closed / Closing
phase
Deenergised opened Output energised
Valve closed / Closing
phase
Output not energised
Valve opened / Opening
phase
Active heating or cooling
Status display according to the energisation state of the valve outputs
In the case of valve outputs working with an 8-bit command value (PWM), the LEDs
dynamically display the switch-on and switch-off phases of the pulse width modula-
tion.
If no valve voltage is connected or switched on at the device connection terminals
8(L) and 8(N), then all the status LEDs are also always switched off, even if bus
voltage or mains voltage is available (terminals L N), as the valve outputs cannot
be energised.
On the LED status display, the valve direction of action configured for each output
in the ETS is not taken into account. As a result, the LEDs do not immediately dis-
play the valve state (opened / closed). Inversion of the status display according to
the valve direction of action thus does not take place.
Short-circuit / overload display
In order to protect the device and connected actuators, in case of overload the
device determines which output is involved and switches it off. Non-overloaded
outputs continue to work, which means that the corresponding rooms are still
heated or cooled.
– In the case of short-circuits or overloads, the actuator first switches off the
affected output groups A1...A3 or A4...A6.
– The actuator determines the overloaded or short-circuited output in up to 4
testing cycles.
– If, in the event of only a minor overload, it is not possible to unambiguously
identify any output as overloaded, then the actuator switches individual out-
puts of the overloaded group off one after the other.
– A detected overload or a detected short-circuit can be sent separately to the
KNX using a 1-bit signal telegram for each valve output.
The status LEDs ŋA1-A3 or ŋA4-A6 on the front panel of the device flash slowly
during the time of an overload or short-circuit identification (1 Hz) to signalise that
the output groups are temporarily deactivated. The LEDs flash quickly when the
actuator has safely identified all or individual valve outputs of the affected group as
overloaded or having short-circuited.
In the testing phase of a short-circuit/overload detection, the outputs of the affected
group(s) cannot be selected during manual operation.
The testing cycle is explained in detail in the "Software description" chapter of this
documentation.
SpaceLogic KNX Valve Drive Controller Status displays and output behaviour
21 | MTN6730-0002 11.08.2020
Activation of the outputs in manual mode
During manual operation, all the valve outputs are activated with a pulse-width
modulation (PWM) using the OPEN button, irrespective of the configured com-
mand value data format (1-bit or 1-byte). The cycle time of the PWM signal for a
valve output activated by manual operation is configured centrally on the para-
meter page "Manual operation" in the ETS. In consequence, a manual operation
locally on the device can allow the use of a different cycle time than in normal oper-
ation of the actuator (activation via KNX telegrams). The CLOSE command always
closes the valves completely (0 %).
An exception is the central operating function of all valve outputs with the ALL OP /
CL button. Here, the actuator always activates the valve outputs with a constant
signal (0 % or 100 %).
In manual operation, the configured valve direction of action (deenergised closed /
deenergised opened) is taken into account during valve activation. With deener-
gised closed valves, the switch-on time is derived directly from the configured
PWM and the cycle time. Example: PWM = 30 %, cycle time = 10 minutes ->
Switch-on time = 3 minutes, switch-off time = 7 minutes.
In the case of deenergised opened valves, the switch-on time is inverted. Example:
PWM = 30 %, cycle time = 10 minutes -> Switch-on time = 7 minutes, switch-off
time = 3 minutes.
Pressing the OPEN button when valves are already opened produces no reaction.
The cycle time of a PWM signal is not restarted. On previously closed valves,
pressing the CLOSE button also does not produce a reaction.
After permanent manual operation has been switched on, the states of the outputs
last set initially remain active. However, for opened valve outputs, the pulse width
modulation is automatically adjusted to the preset value of manual operation.
After temporary manual operation is switched on, the states of the outputs last set
also initially remain active. However, for opened valve outputs, the pulse width
modulation is not adjusted to the preset value of manual operation. This only takes
place when the valves are first closed and then reopened, in the course of brief
manual operation.
In the state as supplied, the valve direction of action for all the valve outputs is set
to "Deenergised closed". The actuator then works with a PWM of 50 % and a cycle
time of 20 minutes.
First Open function
In most cases, deenergised closed actuators possess the "First Open function".
Such an valve drive must, before it can be used normally in combination with the
heating actuator, be energised for a specific period during the first electrical com-
missioning, in order to deactivate an internal mechanical block.
Normally, an intact block in the as-delivered state of the drives means that the
valve drive does not close fully. This means that the flow rate of the actuators and
the hydraulic system can be checked as part of installation and commissioning,
even without electrical actuation of the drives. An additional advantage is that the
small opening of the valve in the as-delivered state means that systems can heat
or cool in a restricted area (frost/heat protection), without the existence of a func-
tioning room temperature control.
Deenergised closed actuators with the First Open function are not usually com-
pletely closed in the as-delivered state. Such drives must be unlocked using the
First Open function, thus activating them for use by the heating actuator.

SpaceLogic KNX Valve Drive Controller Operating modes
22 | MTN6730-0002 11.08.2020
The activation of the actuators for the execution of the First Open function is easily
possible using manual operation of the heating actuator (in construction site mode,
only through an applied mains and valve power supply). In the as-delivered state,
the actuator works with a PWM of 50 % and a cycle time of 20 minutes. This pro-
duces a switch-on time of 10 minutes, when the command "Open valve" is ex-
ecuted in manual operation. This time is sufficiently long to execute the First Open
function properly. In the ETS, both the cycle time and the PWM of manual opera-
tion can be configured and thus adjusted to a desired value.
Alternatively, the central operating function can be used with the ALL OP / CL but-
ton to execute the First Open function. In so doing, all the valve outputs execute
the open or close command simultaneously (depending on the most recent preset-
ting).
6.3 Operating modes
The manual operation of the actuator distinguishes between the following operating
modes:
– Bus operation: Operation via room temperature controllers, push-button
sensors, or other bus devices,
– Temporary manual control: manual control locally with keypad, automatic
return to bus control,
– Permanent manual operation: Exclusively manual operation on the device
(e.g. construction site mode, commissioning phase).
When manual control is active, the outputs cannot be controlled via the bus.
In cases of bus voltage failure, manual operation is possible, provided that the
mains voltage supply of the actuator (terminals L N) is switched on. On bus voltage
return, manual operation can be terminated (central reset function) or continued
without interruption, depending on the configuration.
In manual mode, bus operation can be disabled via a telegram. Manual operation is
terminated on activation of the disabling function.
No manual operation of the device is possible if the actuator is programmed by the
ETS with an incorrect application program or if the application program was un-
loaded. In the state of the actuator as supplied, manual operation can be used even
before commissioning via the ETS (building site operation).
Further details concerning manual control, especially with respect to the possible
parameter settings and the interaction with other functions of the actuator can be
found in chapter 4, "Software description" of the present documentation.
Switching on the temporary manual control
Manual operation is enabled in the ETS and not blocked.
■ Press the c button briefly.
Temporary manual control is active.
The status LED A1 flashes. The LED c remains off.
SpaceLogic KNX Valve Drive Controller Operating modes
23 | MTN6730-0002 11.08.2020
After the temporary manual operation is switched on, the most recently set states of
the outputs initially remain active. For opened valve outputs, the pulse width modu-
lation is not adjusted to the preset value of manual operation. This only takes place
when the valves are first closed and then reopened, in the course of brief manual
operation.
After 5 seconds without a button actuation, the actuator returns automatically to bus
operation.
Switching off temporary manual operation
The device is in short-term manual mode.
■ No button-press for 5 seconds.
- or -
■ Select all outputs one after another by a brief press of the c button. There-
after, press the button again,
- or -
■ Switch off the mains voltage and the bus voltage.
- or -
■ On bus voltage return when mains voltage is available, although only when
the parameter "Response of the manual operation to bus voltage return" is
configured as "Exit manual operation".
Bus operation is active. LEDs A1...A6 no longer flash, but rather indicate the
output status, provided that the valve power supply and the bus or mains
voltage is switched on.
Manual operation is always exited after an ETS programming operation.
The state of all outputs set via manual control is not changed when temporary
manual control is switched off. If, however, a function with a priority higher than that
of normal operation (e.g. forced position, safety operation) was activated for the
valve outputs via the bus before or during manual operation, the actuator executes
the function with the higher priority for the outputs concerned.
Switching on permanent manual control
Manual operation is enabled in the ETS and not blocked.
Bus operation or temporary manual control is active.
■ Press the c button for at least 5 seconds.
Permanent manual operation is active and the LED c is illuminated. The
status LED A1 flashes. The two status LEDs OPEN and CLOSE show the
current status of A1.
After permanent manual operation has been switched on, the states of the outputs
last set initially remain active. However, for opened valve outputs, the pulse width
modulation is automatically adjusted to the preset value of manual operation.
Switching off permanent manual control
The device is in continuous manual mode.
■ Press the c button for at least 5 seconds.

SpaceLogic KNX Valve Drive Controller Operating modes
24 | MTN6730-0002 11.08.2020
- or -
■ Switch off the mains voltage and the bus voltage.
- or -
■ Block manual operation via the corresponding disabling object,
- or -
■ On bus voltage return when mains voltage is available, although only when
the parameter "Response of the manual operation to bus voltage return" is
configured as "Exit manual operation".
Bus operation is active. LEDs A1...A6 no longer flash, but rather indicate the
output status, provided that the valve power supply and the bus or mains
voltage is switched on.
Manual operation is always exited after an ETS programming operation.
Depending on the configuration of the actuator in the ETS, the outputs will be set to
the state last adjusted in the manual operation or to the state internally tracked (e.g.
forced position, service operation) when permanent manual operation is switched
off.
Operating the outputs
In manual operation the outputs can be operated instantly. The outputs are always
activated with pulse width modulation by manual operation with the OPEN com-
mand. The cycle time of the PWM signal for a valve output activated by manual op-
eration is configured centrally on the parameter page "Manual operation" in the
ETS. The CLOSE command closes the valves completely (0 %).
The device is in continuous or short-term manual mode.
■ Press c button briefly, < 1 s, as many times as necessary until the desired
output is selected.
The LED of the selected output A1...A6 flashes. Additionally, the status of
the selected output is indicated by the LED OPEN or CLOSE.
■ Press the OPEN button.
The valve opens (configured valve direction of action is taken into account).
■ Press the CLOSE button.
The valve closes (configured valve direction of action is taken into account).
The LEDs OPEN and CLOSE display the valve status.
Short-term manual operation: After running through all of the outputs, the device
exits manual operation after another brief press of the c button.
Executing the OPEN command when valves are already opened causes no reac-
tion. The cycle time of a PWM signal is not restarted. On previously closed valves,
pressing the CLOSE button also does not produce a reaction.
Depending on the parameter configuration in the ETS, feedback telegrams are
transmitted to the bus via the status objects of an output during operation, as ne-
cessary.
SpaceLogic KNX Valve Drive Controller Operating modes
25 | MTN6730-0002 11.08.2020
Operate all outputs simultaneously
All the valve outputs of the actuator can be activated at the same time. In contrast
to the operating function using the OPEN or CLOSE buttons, the actuator always
activates the valve outputs with a constant signal (0 % or 100 %), when they are
activated simultaneously. Thus, the valves close or open completely. No pulse
width modulation is executed.
This operating function is particularly practical for performing the First Open func-
tion of deenergised closed valves during first commissioning.
The device is in continuous manual mode.
■ Press the ALL OP / CL button.
Each time the button is pressed, the valves open and close alternately (all
open -> all close -> all open...). The configured valve direction of action is
taken into account.
Executing the OPEN central command when valves are already opened causes
PWM to be terminated. The command value switches to 100 %. The cycle time of a
PWM signal is not restarted. On previously closed valves, executing the CLOSE
central command does not produce a reaction.
The ALL OP / CL button has no function in temporary manual operation. In this
case pressing this button produces no reaction.
Disabling bus control of individual outputs manually
It is possible to use manual operation to disable selected valve outputs in such a
way that they can no longer be activated via the bus.
The device is in continuous manual mode.
Disabling of the bus control mode must have been enabled in the ETS.
■ Press the c button briefly as many times as necessary until the desired out-
put is selected.
The status LED of the selected output A1...A6 flashes. The two status LEDs
OPEN and CLOSE show the current status of the selected output.
■ Press the OPEN and CLOSE buttons simultaneously for at least 5 seconds.
The selected valve output is disabled (activation via the bus no longer pos-
sible). The status LED of the disabled output flashes quickly and constantly
(even with manual operation deactivated).
An output that has been disabled in manual control can thereafter only be operated
in permanent manual control.
Cancelling the disabling of bus control of individual
outputs via manual control.
The device is in continuous manual mode.
Bus control of a valve output has been disabled previously in permanent manual
operation.
■ Press the c button briefly as many times as necessary until the desired out-
put is selected.
The status LED of the selected output A1...A6 flashes quickly. The two
status LEDs OPEN and CLOSE show the current status of the selected out-
put.

SpaceLogic KNX Valve Drive Controller Operating modes
26 | MTN6730-0002 11.08.2020
■ Press the OPEN and CLOSE buttons simultaneously for at least 5 seconds.
Selected output is enabled.
The selected valve output is re-enabled (activation via the bus is possible
again after manual operation has been deactivated).
The status LED of the enabled output flashes slowly.

SpaceLogic KNX Valve Drive Controller
27 | MTN6730-0002 11.08.2020
7 Scope of functions
Valve outputs
– 6 independent electronic valve outputs.
– Valve activation (deenergised opened / closed) can be configured for each
output.
– Actuator evaluation as "Switching, 1-bit", "Constant, 1-byte" or "Constant 1-
byte with actuator limiting value and hysteresis".
– With a 1-byte command value, the outputs are activated by pulse width
modulation (PWM). The cycle time can be configured for each valve output.
– Status feedback (1 bit or 1 byte) of each output possible automatically or on
read request.
– Collective feedback of all valve states possible via 4-byte telegram.
– A combined valve status allows the collective feedback of various functions
of an output in a single 1-byte bus telegram.
– Failure signal of the valve operating voltage can be configured (1-bit).
– Overload and short-circuit signal can be set separately via a 1-bit object for
each valve output (polarity can be configured). Global reset of all short-cir-
cuit / overload signals possible.
– Heat requirement and pump control, for positive influencing of the energy
consumption of a housing or commercial building. Provision of the largest
active command value directly via KNX telegram (1-byte constant). Alternat-
ively or additionally, evaluation of the actuator command values for provi-
sion of the general heat requirement information in the form of limiting value
monitoring with hysteresis (1-bit switching). Activation of a circulation pump
of the heating or cooling circuit via a 1-bit KNX telegram with limiting value
evaluation. Optional cyclical anti-sticking protection prevents the sticking of
the pump.
– Summer or winter mode can be selected via an object (polarity configur-
able).
– Each valve output can be locked in a forced position with bus control. Differ-
ent command values can be configured for summer and winter mode.
– Cyclical monitoring of the command value of each output can be set, taking
into account a configurable monitoring time. If no telegram is received within
the preset monitoring time, the valve output concerned switches to emer-
gency operation. Different command values can be configured for summer
and winter mode. The fault telegram is configurable.
– On activation with constant command values, an optional command value
limit can be designed, which allows the limitation of received command val-
ues at the "Minimum" and "Maximum" limits.
– Automatic valve rinsing to prevent calcification or sticking of a valve which
has not been activated for some time.
– Operating hours counter to record the switch-on times of the valve outputs.
– Service mode for the maintenance or installation of valve drives (locking of
the valve outputs in a defined state). Both service mode and the locking
status are preset by a 2-bit forced operation telegram.

SpaceLogic KNX Valve Drive Controller
28 | MTN6730-0002 11.08.2020
– Manual operation of outputs independent of the KNX (for instance, con-
struction site mode) with LED status indicators. Separate status feedback to
the KNX for manual operation. Manual operation can also be disabled via
the KNX. Own cycle time and PWM setting for manually-operated valve out-
puts. Central activation of all valve outputs (0 % / 100 %).
– Behaviour in case of bus voltage failure and bus voltage return as well as
after ETS programming settable for each valve output.
– Various actively transmitting feedback or status signals can be delayed
globally after bus voltage return or after an ETS programming operation.
– The parameters of the outputs can be set individually (each valve output
possesses its own parameters) or globally (all the valve outputs are con-
figured in the same way with a single configuration).
Room temperature controller
– Up to 6 independent room temperature controllers.
– Individual control of a controller using communication objects.
– Various operating modes can be activated: Comfort, Standby, Night and
Frost/heat protection
– Each operating mode can be assigned its own temperature-setpoints (for
heating and/or cooling).
– Configuring the temperature setpoints as relative (derived from basic set-
point) or absolute (independent setpoint temperatures for each operating
mode).
– Comfort extension possible using presence button in Night or Frost/heat
protection mode. Configurable duration of the comfort extension.
– Operating mode switchover via 1-byte objects according to the KNX spe-
cification or using up to four individual 1-bit objects.
– Status feedback telegrams (also KNX compliant) can be configured.
– Frost/heat protection switchover via window status or by automatic frost pro-
tection.
– Operating modes "Heating", "Cooling", "Heating and cooling" each with or
without additional level. The temperature setpoints for the additional level
are derived via a configurable level offset from the values of the basic level.
– Various control types can be configured for each heating or cooling level: PI
control (permanent or switching PWM) or 2-point feedback control (switch-
ing).
– Control parameter for PI controller (if desired: proportional range, reset
time) and 2-point controller (hysteresis) adjustable.
– Automatic or object oriented switch-over between "heating" and "cooling".
– A temporary or permanent setpoint shift for a relative setpoint specification
through communication objects is possible (e.g. via a controller extension).
– Configurable step width of the setpoint shift (0.1 K / 0.5 K).
– Deactivating the feedback control or the additional level possible using sep-
arate 1-bit objects.
– Room temperature measurement via up to two external KNX temperature
sensors. Calibration of the temperature values possible and measured
value formation of the external sensors can be configured. Settable polling
time of the externally received temperature values.
– The actual and setpoint temperatures can be output on the bus if a configur-
able deviation is detected (also periodically).

SpaceLogic KNX Valve Drive Controller
29 | MTN6730-0002 11.08.2020
– Separate or shared command value output in heating and cooling mode.
This produces one or two command value objects for each level.
– Normal or inverted command value output configurable
– Automatic transmission and cycle-time for actuating output configurable
– Command value limit possible.
– Floor temperature limit possible in heating mode. Thus temperature-con-
trolled switch-off of a floor heater as protective function.
– Setpoint temperature limit possible in cooling mode. If necessary, the con-
troller limits the setpoint temperature to specific values and prevents an ad-
justment beyond statutory limits.

SpaceLogic KNX Valve Drive Controller
30 | MTN6730-0002 11.08.2020
8 Notes on software
ETS project design and commissioning
For project design and commissioning of the device, ETS4 from Version 4.2 on-
wards or ETS5 is required.
Safe-state mode
If the device does not work properly - for instance as a result of errors in the project
design or during commissioning - the execution of the loaded application program
can be halted by activating the safe-state mode. In safe-state mode, activation of
the MSA outputs via the KNX or manual operation is not possible. The room tem-
perature controllers also have no function. The actuator remains passive in safe-
state mode, since the application program is not being executed (state of execu-
tion: Terminated). Only the system software is still functional so that the ETS dia-
gnosis functions and also programming of the device continue to be possible.
Activating the safe-state mode
■ Shut off the bus and the mains voltage supply. Wait a bit.
■ Press and hold down the programming button.
■ Switch on the bus or mains voltage. Release the programming button only
after the programming LED starts flashing slowly.
The safe-state mode is activated. With a new brief press of the program-
ming button, the programming mode can be switched on and off as usual
also in the safe-state mode. The programming LED stops flashing. How-
ever, safe-state mode remains active.
The safe-state mode can be terminated by switching off the supply voltage
(bus and mains) or by programming with the ETS.
Unloading the application program
The application program can be unloaded with the ETS. In this case the device is
without function. Manual operation is no longer possible.

SpaceLogic KNX Valve Drive Controller Parameter configuration for valve outputs
31 | MTN6730-0002 11.08.2020
9 Description of channel-
independent functions
9.1 Parameter configuration for valve outputs
To simplify the configuration, all the valve outputs can be assigned to the same
parameters in the ETS and thus configured identically. The parameter "Setting of
the output parameters" on the parameter page "General" specifies whether every
valve output of the device can be configured individually or whether all the outputs
should be configured by the same parameters.
In the "All outputs equal" setting, the number of parameters in the ETS is reduced.
The visible parameters are then used on all the valve outputs automatically. Only
the communication objects can then be configured separately for the outputs. This
setting should be selected, for example, if all the actuators behave identically and
should only be activated by different group addresses (e.g. in office blocks or in
hotel rooms).
In the parameter setting "Each output individually", each valve output possesses its
own parameter pages in the ETS.
9.2 Priorities for valve outputs
The heating actuator distinguishes between various functions and events, which
either affect all of some of the assigned valve drives globally, or only specifically af-
fect individual outputs. Because these functions and events cannot be executed
simultaneously, there must be priority control. Each global or output-orientated
function and each incoming event possesses a priority. The function or the event
with the higher priority overrides the lower-priority functions and events.
The following priorities are defined...
– Overload / short-circuit (highest priority)
– Manual operation
– Behaviour after ETS programming
– Behaviour in case of mains or bus voltage return / bus voltage failure
– Service mode
– Valve rinsing
– forced position
– Command value limit
– Emergency operation (through cyclical monitoring of the command value)
– Normal operation (activation using command value telegrams)
The behaviour after an ETS programming operation is only executed if there have
been changes in the configuration of the device. If just an application download is
executed with a project design already located in the actuator, then the actuator will
executed the behaviour after bus voltage return.
In manual operation and in service mode, a parameter separately defines the be-
haviour of each of the valve outputs at the end of these functions. The heating ac-
tuator only then executes the configured behaviour if, at the time of enabling, no
function with a lower priority is active. Should a lower-level function be active (e.g.
forced position), then the actuator will execute the behaviour of this function again.

SpaceLogic KNX Valve Drive Controller Manual control for valve outputs
32 | MTN6730-0002 11.08.2020
Special case: A function with a higher priority (e.g. manual operation) is active. Be-
fore this, a function with a lower priority (e.g. service mode) was active. This func-
tion is deactivated whilst the higher-level function remains active. At the end of the
higher-priority function, the state of the outputs should be tracked. The actuator
then evaluates the command value of the lower-level function and checks how the
behaviour is preset or configured here. The actuator then executes the command
value presetting of the lower-level function. If tracking is also preset or configured
for this function, the actuator will still go one layer lower and evaluate the behaviour
configured there.
Example 1: Service mode is active (valve completely opened / 100 % command
value). A value of 10 % was most recently preset via a command value telegram
(normal operation). No other functions are active. Service mode is configured in
such a way that the starting state should be tracked at the end of this function.
Permanent manual operation is now activated. The actuator assumes the com-
mand value of manual operation (e.g. 50 %). Whilst manual operation is active, ser-
vice mode is deactivated via the KNX. The actuator remains in manual operation
until this is exited via the button field. As no more lower-level functions are active,
the heating actuator evaluates the parameter "Behaviour at the end of permanent
manual operation during bus operation". As this parameter is set to "Track outputs",
the actuator now evaluates the command value to be tracked. For this, it checks
how the behaviour at the end of service mode is preset. Here too, the state should
be tracked. Thus, the actuator evaluates the other lower-level functions. As no
other functions were and are activated, the actuator sets the last command value
presetting at the valve output using the KNX telegram (here 10 %).
Example 2: Service mode is active (valve completely opened / 100 % command
value). A value of 10 % was most recently preset via a command value telegram
(normal operation). No other functions are active. Service mode is configured in
such a way that no change should be executed at the end of this function.
Permanent manual operation is now activated. The actuator assumes the com-
mand value of manual operation (e.g. 50 %). Whilst manual operation is active, ser-
vice mode is deactivated via the KNX. The actuator remains in manual operation
until this is exited via the button field. As no more lower-level functions are active,
the heating actuator evaluates the parameter "Behaviour at the end of permanent
manual operation during bus operation". As this parameter is set to "Track outputs",
the actuator now evaluates the command value to be tracked. For this, it checks
how the behaviour at the end of service mode is preset. There, the configuration
states that there should be no change. Thus, the heating actuator for the affected
valve output assumes the command value of service mode (here 100 %) and sets
this at the output. In this case, the actuator no longer evaluates other lower-level
functions.
9.3 Manual control for valve outputs
All the valve outputs of the device have electronic manual operation. The button
field with 4 function keys and 3 status LEDs on the front panel of the device can be
used for setting the following modes of operation...
– Bus operation: Operation via room temperature controllers, push-button
sensors, or other bus devices,
– Temporary manual control: manual control locally with keypad, automatic
return to bus control,
– Permanent manual operation: Exclusively manual operation on the device
(e.g. construction site mode, commissioning phase).

SpaceLogic KNX Valve Drive Controller Manual control for valve outputs
33 | MTN6730-0002 11.08.2020
The operation of the function keys, the activation of the valve outputs and the
status display are described in detail in chapter "Operation" (siehe Kapitel "Opera-
tion" } Page 19). The configuration, status feedback, disabling via bus operation,
and interaction with other functions of the device when manual operation is activ-
ated and deactivated are described in greater detail below.
Manual control is possible while the device is supplied with power from the mains
or bus. In the state as supplied the manual control mode is fully enabled. In this un-
programmed state, all the outputs can be controlled by manual operation, so that
fast function checking of the connected valve drives (e.g. on the construction site)
is possible.
After initial commissioning of the actuator via the ETS, manual control can be en-
abled or disabled separately for various states of operation. Manual control can, for
instance, be disabled during bus operation (bus voltage applied). Another option
consists in the complete disabling of the manual control only in case of bus voltage
failure. Therefore manual control can be disabled completely, if the bus disable and
bus failure disable are active.
Enabling the manual control mode
Manual control for the different states of operation is enabled or disabled by means
of the parameters "Manual control in case of bus voltage failure" and "Manual con-
trol during bus operation".
■ Set the parameter "Manual control in case of bus voltage failure" to "en-
abled".
Manual control is then basically enabled when the bus voltage is off. This
setting corresponds to the setting of the actuator as delivered.
■ Set the parameter "Manual control in case of bus voltage failure" to "dis-
abled".
Manual control is completely disabled when the bus voltage is off. In this
case, bus operation is not possible either so that the outputs of the actuator
can no longer be activated.
■ Set the parameter "Manual control during bus operation" to "enabled".
Manual control is then basically enabled when the bus voltage is on. The
outputs of the actuator can be activated via the bus or manually. This set-
ting corresponds to the setting of the actuator as delivered.
■ Set the parameter "Manual control during bus operation" to "disabled".
Manual control is completely disabled when the bus voltage is on. In this
configuration, the actuator outputs can only be operated via the bus.
Presetting a manual control disable
The manual control mode can be separately disabled via the bus, even if it is
already active. If the disabling function is enabled, then as soon as a disabling tele-
gram is received via the disabling object of the manual control, the actuator imme-
diately terminates an activated manual control and locks the function keys on the
front panel of the device. The telegram polarity of the disabling object is paramet-
erisable.
The manual control mode during bus operation must be enabled.
■ Set the parameter "Disabling function ?" on parameter page "Manual con-
trol" to "yes".
The disabling function of the manual control mode is enabled and the dis-
abling object is visible.
SpaceLogic KNX Valve Drive Controller Manual control for valve outputs
34 | MTN6730-0002 11.08.2020
■ Select the desired telegram polarity in the "Disabling object polarity" para-
meter.
If the polarity is "0=disabled; 1=enabled", the disabling function is immediately
active on return of bus/mains voltage or after an ETS programming operation (ob-
ject value"0"). To activate the manual control in this case, an enable telegram "1"
must first be sent to the disabling object.
In case of bus voltage failure, disabling via the disabling object is always inactive
(depending on parameterization, the manual control is then either enabled or com-
pletely disabled). After bus and mains voltage return, a disabled state that was act-
ive beforehand is always inactive when the polarity of the disabling object is non-in-
verted. If only the bus voltage has failed and been switched on again (mains
voltage is available without interruption), then an activated disable remains intact.
When an active manual control is terminated by a disable, the actuator will also
transmit a "Manual control inactive" status telegram to the bus, if the status mes-
saging function is enabled.
Presetting the status message function for the manual
control mode
An actuator can transmit a status telegram to the bus via a separate object when
the manual operation is activated or deactivated. The status telegram can only be
transmitted when the bus voltage is switched on. The polarity of the status tele-
gram can be parameterised.
The manual control mode during bus operation must be enabled.
■ Set the parameter "Transmit status ?" on parameter page "Manual control"
to "yes".
The status messaging function of manual control is enabled and the status
object is visible.
■ Specify in the parameter "Status object function and polarity" whether the
status telegram is generally a "1" telegram whenever the manual control
mode is activated or only in those cases where the permanent manual
mode is activated.
The status object is always "0" when the manual control mode is deactivated.
The status is not transmitted automatically after bus/mains voltage return.
When active manual control is terminated by a disable, the actuator will also trans-
mit a "Manual control inactive" status telegram to the bus.
Presetting the behaviour at the beginning and at the
end of manual control
The manual control distinguishes the temporary and permanent manual control.
The behaviour is different depending on these modes of operation, especially at
the end of manual control. It should always be noted that bus operation is always
disabled while manual operation is active, as manual operation has a higher prior-
ity (siehe Kapitel "Priorities for valve outputs" } Page 31).
Behaviour at the beginning of manual control:
The behaviour at the beginning of manual operation differs for temporary and per-
manent manual operation. On activation of short-time manual operation, the most
SpaceLogic KNX Valve Drive Controller Manual control for valve outputs
35 | MTN6730-0002 11.08.2020
recently set states of the outputs initially remain active. For opened valve outputs,
the pulse width modulation is not adjusted to the preset value of manual operation.
This only takes place when the valves are first closed and then reopened, in the
course of brief manual operation. Even after permanent manual operation is
switched on, the states of the outputs last set initially remain active. However, for
opened valve outputs, the pulse width modulation is automatically adjusted to the
preset value of manual operation.
Behaviour at the end of manual control:
The behaviour at the end of manual control is different for temporary and perman-
ent manual control.
The temporary manual mode is shut off automatically when the last output has
been addressed and when the select key c is pressed once more. The state of all
outputs set via manual control is not changed when temporary manual control is
switched off. If, however, a function with a priority higher than that of normal opera-
tion (e.g. forced position, safety operation) was activated for the valve outputs via
the bus before or during manual operation, the actuator executes the function with
the higher priority for the outputs concerned.
The permanent manual control mode is shut off, when the select key c is pressed
for more than 5 seconds. Depending on the configuration of the actuator in the
ETS, the outputs will be set to the state last adjusted in the manual operation or to
the state internally tracked (e.g. forced position, service operation) when perman-
ent manual operation is switched off. The parameter "Behaviour at the end of per-
manent manual control during bus operation" defines the corresponding reaction.
■ Set the parameter "Behaviour at the end of permanent manual control dur-
ing bus operation" to "no change".
After the end of the permanent manual operation, the current state of all
valve outputs remains unchanged. If, however, a function with a priority
lower than that of manual operation (e.g. forced position, service mode) has
been activated via the bus before or during manual operation, the actuator
sets the reaction preset for this function for the appropriate outputs.
■ Set the parameter "Behaviour at the end of permanent manual control dur-
ing bus operation" to "track outputs".
During active permanent manual operation, all incoming telegrams and
state changes are tracked internally. At the end of the manual operation, the
valve outputs are set according to the most recently received command or
the most recently activated function with a lower priority.
The behaviour at the end of the permanent manual control when the bus voltage is
off (e.g. building site operation) is permanently set to "no change".
The control operations triggered in the manual control mode will be transmitted via
feedback objects to the bus, if enabled and actively transmitting.
During an ETS programming operation, an activated manual operation mode will al-
ways be terminated. In this case, the parameterised or predefined behaviour at the
end of manual control will not be executed. The actuator executes the configured
behaviour after ETS programming instead.
Setting the behaviour of manual operation to bus
voltage return
An active short-time or permanent manual operation can be terminated as option,
should the bus voltage fail, or not. The following always applies: If the mains
voltage supply is not switched on, manual operation is possible is bus voltage is
SpaceLogic KNX Valve Drive Controller Manual control for valve outputs
36 | MTN6730-0002 11.08.2020
available (valve output can only be activated if a valve power supply is available).
If, in this case, the bus voltage is switched off, the actuator also always exits
manual operation, as there is no power supply to the device electronics. After the
bus voltage return (mains power supply switched off), manual operation is always
deactivated.
■ Set the "Behaviour of manual operation on bus voltage return" parameter to
"Exit manual operation".
After the bus voltage return through a mains power supply being available,
active manual operation is exited. For example, this means that it is pos-
sible to deactivate manual operation through a simultaneous bus reset on
multiple actuators with the same parameter setting.
■ Set the "Behaviour of manual operation on bus voltage return" parameter to
"Do not exit manual operation".
After the bus voltage return through a mains power supply being available,
active manual operation is never exited.
Setting disabling of the bus control
Individual valve outputs can be disabled locally during permanent manual opera-
tion, so that the disabled outputs can no longer be activated using input command
value telegrams or lower-priority device functions. Such disabling of the bus opera-
tion is initiated by local operation in permanent manual operation and is indicated
by rapid flashing of the status LEDs on the front panel of the device. The disabled
outputs can then only be activated in permanent manual control.
The manual control mode during bus operation must be enabled.
■ Set the "Disable bus control of individual outputs during bus operation"
parameter on parameter page "Manual control" to "yes".
The function for disabling the bus control is enabled and can be activated
locally.
■ Set the "Disable bus control of individual outputs during bus operation"
parameter on parameter page "Manual operation" to "No".
The function for disabling the bus control is deactivated.
A locally instigated disable overrides all the other functions of the actuator that can
be activated via the bus (e.g. service mode or forced position). Depending on the
configuration of the actuator in the ETS, the outputs will be set to the state most re-
cently set or internally tracked after the disabling and subsequent deactivation of
permanent manual operation.
Any disabling of the bus control activated locally is not reset after bus voltage return
if the mains voltage was switched on interruption free. A failure of the bus and
mains voltage or ETS programming operation always deactivates the disabling of
the bus control.
Setting the cycle time and PWM of manual operation
During manual operation, all the valve outputs are activated with a pulse-width
modulation (PWM) using the OPEN button, irrespective of the configured com-
mand value data format (1-bit or 1-byte). Taking the cycle time set in the device
into account. the average output signal resulting from the statically configured
pulse width modulation is a measure of the centred valve position of the control
valve and thus a reference for the set room temperature for manual operation. The
cycle time of the PWM signal can, like PWM itself, be configured centrally on the
parameter page "Manual operation" in the ETS. In consequence, a manual opera-
SpaceLogic KNX Valve Drive Controller Service mode for valve outputs
37 | MTN6730-0002 11.08.2020
tion locally on the device can allow the use of a different cycle time than in normal
operation of the actuator (activation via KNX telegrams).
The CLOSE command always closes the valves completely (0 %). In the central
operating function of all valve outputs with the ALL OP / CL button, the actuator al-
ways activates the valve outputs with a constant signal (0 % or 100 %).
■ Configure the parameters "Cycle time for manual operation" and "PWM for
manual operation (5...100 %)" on the "Manual operation" parameter page to
the required values.
For opened valve outputs, the actuator sets the set pulse width modulation
(PWM) with the preset cycle time. With short-time manual operation, this
only takes place when the OPEN button has been pressed. In permanent
manual operation, the actuator sets the PWM immediately after the activa-
tion of manual operation for opened valve outputs.
In manual operation, the configured valve direction of action (deenergised
closed / deenergised opened) is taken into account during valve activation.
With deenergised closed valves, the switch-on time is derived directly from
the configured PWM and the cycle time.
Example: PWM = 30 %, cycle time = 10 minutes -> Switch-on time = 3
minutes, switch-off time = 7 minutes.
In the case of deenergised opened valves, the switch-on time is inverted.
Example: PWM = 30 %, cycle time = 10 minutes -> Switch-on time = 7
minutes, switch-off time = 3 minutes.
In the as-delivered state, the actuator works with a PWM of 50 % and a cycle time
of 20 minutes.
9.4 Service mode for valve outputs
Service mode allows the bus-controlled locking of all or some valve outputs for
maintenance or installation purposes. If service mode is active, actuators can be
moved to a defined position (completely open or closed) and locked against activa-
tion by command value telegrams. Both service mode and the locking state are
preset by a 2-bit forced operation telegram, according to KNX DPT 2.001.
The first bit (bit 0) of the object "Service mode - Activate / deactivate input" directly
specifies the locking state. The second bit (bit 1) of the object activates or deactiv-
ates service mode. The locking state in the telegram is only evaluated by the actu-
ator, when bit 1 plans for active service mode. Otherwise, bit 0 is ignored.
The valves activated by service mode open or close completely and statically. No
pulse width modulation is executed. The configured valve direction of action is
taken into account in the electrical activation of the outputs.
Bit 1 Bit 0 Function
0 x Service mode not active ->
normal control according
to priority rule
0 x Service mode not active ->
normal control according
to priority rule
1 0 Service mode active:
Close valves
1 1 Service mode active:
Open valves
Bit coding of service mode

SpaceLogic KNX Valve Drive Controller Service mode for valve outputs
38 | MTN6730-0002 11.08.2020
Service mode influences the status signals of the affected valve outputs. Depend-
ing on the configured command value data format, the following command values
are assumed when service mode is active...
– Switching (1 bit):
Valve closed = OFF
Valve opened = ON
– Constant (1-byte) with pulse width modulation (PWM):
Valve closed = 0 %
Valve opened = 100 %
– Constant (1-byte) with command value limiting value:
Valve closed = OFF
Valve opened = ON
The command value preset by an active service mode is also included in the de-
termination of heat requirements and the largest command value. In addition, ser-
vice mode has an influence on pump control.
The behaviour of the assigned valve outputs at the end of service mode can be
configured. In addition, a 1-bit status object can signal when service mode is active
or not.
Updates of the object from "Service mode active" to "Service mode active" while
maintaining the forced valve status or from "Service mode inactive" to "Service
mode inactive" produce no change in the behaviour of the value outputs. However,
the status telegram of the service mode is retransmitted on each update.
Valve outputs locked by service mode can still be activated in manual operation. At
the end of a manual operation, the actuator executes the service reaction for the
appropriate valve outputs once again if service mode is still activated at this time.
Enabling service mode
Service mode must first be enabled on the "General" parameter page, so that it can
be activated and deactivated via the KNX during actuator operation.
■ Set the parameter "Use service mode ?" to "yes".
Service mode is enabled. The communication object "Service mode - Deac-
tivate / activate input" becomes visible. Valve outputs can be assigned on
the parameter pages "Ax - assignments".
■ Set the parameter "Use service mode ?" to "no".
Service mode is not available. No valve outputs can be assigned to service
mode in the ETS.
Assign outputs to service mode
For a valve output to be influenced by service mode, an assignment must take
place. On the parameter pages "Ax - Assignments", it is possible to define the as-
signment to service mode separately for each valve output.
■ Set the parameter "Assignment to service mode ?" to "yes".
The appropriate valve output is assigned to service mode. It is locked ac-
cording to the object value when service mode is active.
■ Set the parameter "Assignment to service mode ?" to "no".
The valve output is not assigned to service mode. Activation and deactiva-
tion of the service function does not influence the output.
SpaceLogic KNX Valve Drive Controller Collective feedback for valve outputs
39 | MTN6730-0002 11.08.2020
Assignments can only be made on the parameter pages "Ax - Assignments" if ser-
vice mode is enabled on the "General" parameter page.
Defining the behaviour at the end of service mode
When service mode is deactivated, the assigned valve outputs are enabled again.
Activation of these outputs using command value telegrams or other functions with
a lower priority is then possible. The parameter "Behaviour at the end of service
mode" specifies the state to which the affected valve outputs go after enabling.
At the end of service mode, the actuator only then executes the configured beha-
viour if, at the time of enabling, no function with a lower priority is active. Should
such a function be active (e.g. forced position), then the actuator will execute it.
■ Set the parameter to "No change".
In this setting, assigned valve outputs show no reaction at the end of ser-
vice mode. They remain in the most recently set state, until a new command
value presetting is implemented.
■ Set the parameter to "Close all outputs completely".
In this setting, all the assigned valve outputs close completely. Here too, the
actuators remain in this state until a new command value presetting is im-
plemented.
■ Set the parameter to "Open all outputs completely".
In this setting, all the assigned valve outputs open completely. The actuat-
ors remain in this state until a new command value presetting is implemen-
ted.
■ Set the parameter to "Track states".
In this configuration, the valve state received during the service function or
preset by the function is tracked at the end of service mode.
Configuring the status function of service mode
An active service mode can optionally be displayed by a 1-bit status object. A tele-
gram with the value "1" displays an active service mode. A telegram with the value
"0" displays a deactivated service function.
As soon as service mode is enabled in the ETS, the status communication object is
also available.
Updates of the 2-bit input object from "Service mode active" to "Service mode act-
ive" or from "Service mode inactive" to "Service mode inactive" always causes re-
transmission of the status telegram.
The object value of the status function is not transmitted automatically to the bus
after a device reset (ETS programming operation, bus/mains voltage return).
9.5 Collective feedback for valve outputs
After central commands or after bus/mains voltage return, a KNX line is generally
heavily loaded by data traffic as many bus devices are transmitting the state of
their communication objects by means of feedback telegrams. This effect occurs
particularly when using visualisations. Collective feedback can be used to keep the
telegram load low during initialisation.
The collective feedback summarises the states of all valve outputs in bit-orientated
form (see figure 5).
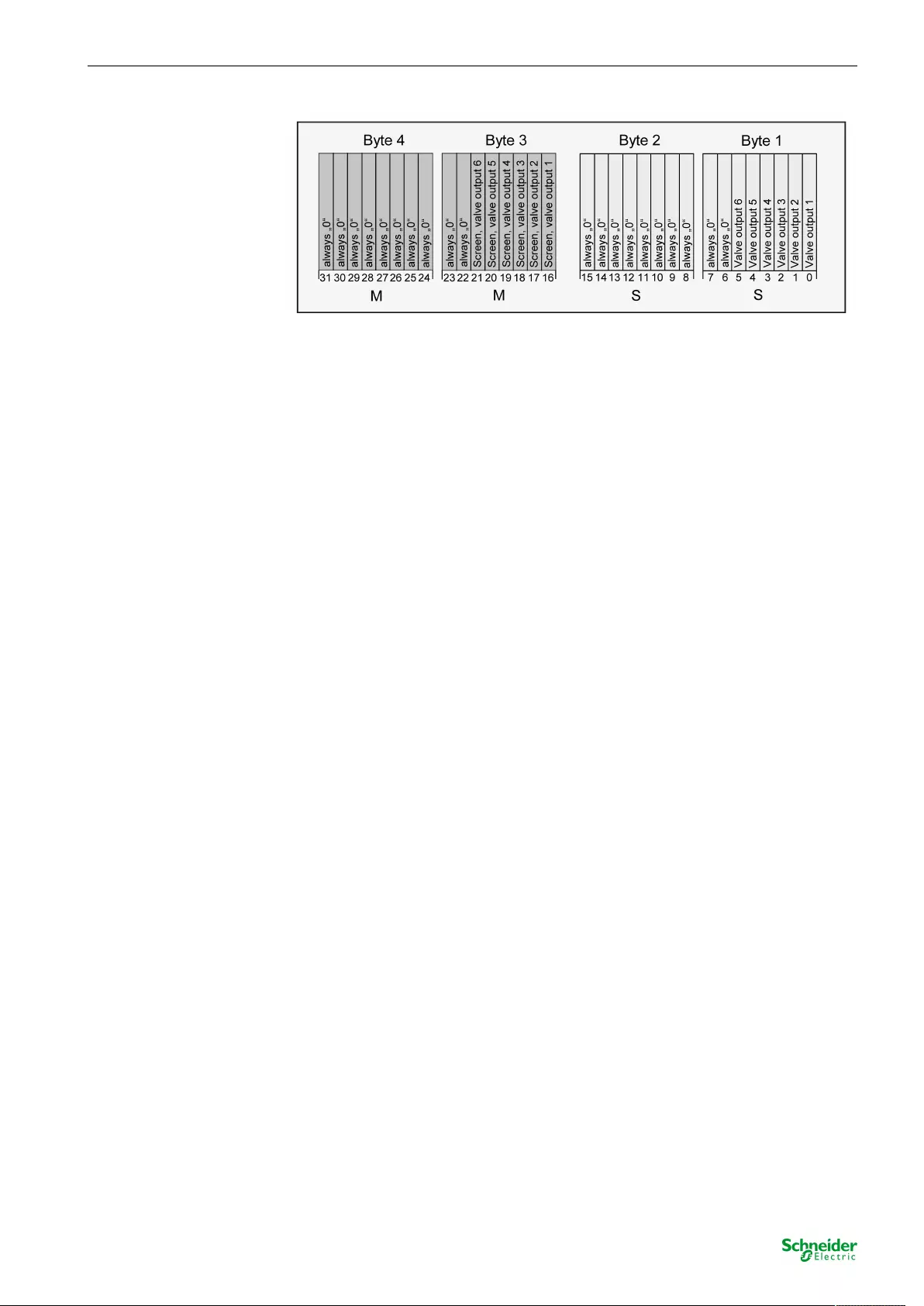
SpaceLogic KNX Valve Drive Controller Collective feedback for valve outputs
40 | MTN6730-0002 11.08.2020
Image5: Object structure of the collective feedback
The 4-byte object of the collective feedback contains the status information of all 6
valve outputs. Each valve output has one bit representing the state ("S" bit) and an-
other one defining the masking ("M" bit). The "S" bits correspond to the logical
valve states and are either "1" (Valve opened) or "0" (Valve closed). Through the
state "1", the "M" bits show that the output exists and, therefore, the corresponding
"S" bit can be evaluated. The "0" state in an "M" bit shows that the actuator does
not possess this output number. In this case, the corresponding "S" bits are con-
stantly "0", as there is no valve state.
The following heating actuator possesses 6 outputs. As a result, the following ex-
ample object values result...
"00 3F 00 xx", x = switching states
-> Only valve outputs 1 and 2 opened: "00 3F 00 03"
-> Only valve outputs 1 and 3 opened: "00 3F 00 05"
-> All valve outputs opened: "00 3F 00 3F"
The status of the "S" bits in the collective feedback is dependent on the active com-
mand value of a valve output. Constant command values are converted into a 1-bit
status: 0 % -> "0" / "1...100 %" -> "1"
The valve direction of action configured for each output in the ETS is also evalu-
ated in the electrical activation of the actuators.
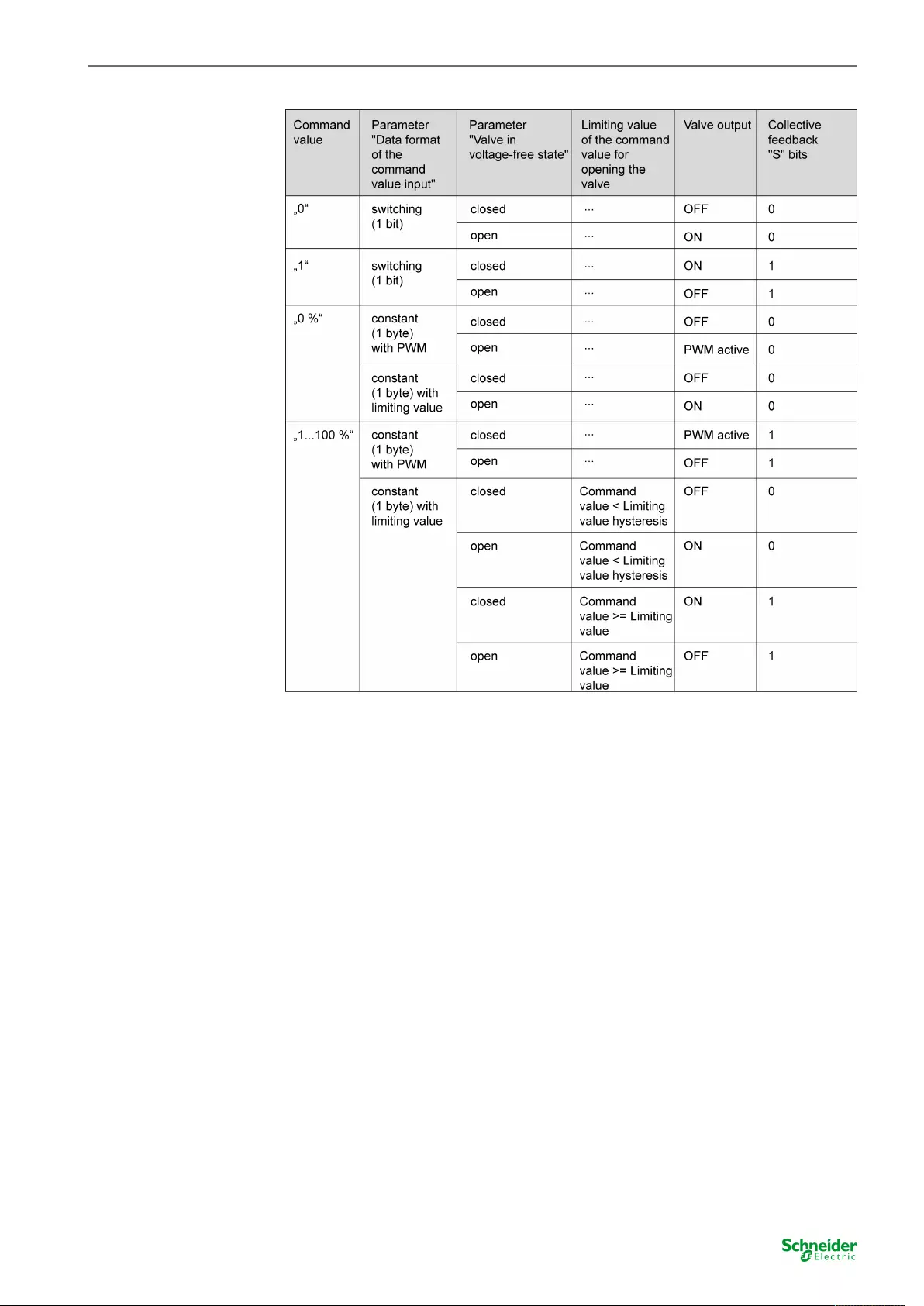
SpaceLogic KNX Valve Drive Controller Collective feedback for valve outputs
41 | MTN6730-0002 11.08.2020
Image6: Status in the collective feedback, dependent on the command value and
configuration of the valve outputs
Use of the collective feedback would be possible in appropriate visualisation ap-
plications - for example, in public buildings such as schools or hospitals - where the
valve states of the actuators are displayed centrally and there is no separate state
display at the control sections. In such applications, the collective feedback can re-
place the status individual feedback and thereby reduce the bus load.
Activate collective feedback
Collective feedback is a global device function and can be enabled in the para-
meter node "Valve / Pump".
■ Set the parameter "Collect. feedbk status of valve outputs (opened /
closed) ?" to "yes".
Collective feedback is enabled. The collective feedback object becomes vis-
ible in the ETS.
■ Set the parameter to "no".
Collective feedback is deactivated. No collective feedback object is avail-
able.

SpaceLogic KNX Valve Drive Controller Collective feedback for valve outputs
42 | MTN6730-0002 11.08.2020
Collective feedback type
Collective feedback can be provided in the function of an active signalling object or
a passive status object. In the case of an active signal object, the feedback is auto-
matically transmitted to the bus whenever the status contained therein changes. In
the function as a passive status object, there is no automatic telegram transmis-
sion. In this case, the object value must be read out. The ETS automatically sets
the object communication flags required for proper functioning.
Collective feedback must be enabled.
■ Set the parameter "Type of collective feedback" to "Active signalling object".
The actuator transmits the collective feedback automatically when the ob-
ject value is updated. After a device reset (ETS programming operation, bus
and mains voltage return, only bus voltage return), current collective feed-
back is always transmitted.
■ Set the parameter to "Passive status object".
Collective feedback will only be transmitted in response if the object is read
out from the bus. No automatic telegram transmission of the collective feed-
back takes place after bus or mains voltage return or after an ETS program-
ming operation.
Setting collective feedback after bus/mains voltage
return or after programming with the ETS
If used as active signal object, the collective feedback is transmitted to the bus
after bus and mains voltage return, after just bus voltage return or after an ETS
programming operation. In these cases, the feedback can be time-delayed with the
time delay being preset globally for all device feedback together on the "General"
parameter page.
Collective feedback must be enabled and the feedback type set to "Active mes-
sage object".
■ Set the parameter "Time delay for feedback after bus voltage return ?" to
"yes".
The collective feedback telegram is transmitted with a delay after bus and
mains voltage return, after just bus voltage return or after programming in
ETS. No feedback is transmitted during a running time delay, even if a valve
state changes.
■ Set the parameter "Time delay for feedback after bus voltage return ?" to
"no".
The collective feedback is transmitted immediately after bus / mains voltage
return or after an ETS programming operation.
Setting cyclic transmission of the collective feedback
The object of the collective feedback can also transmit its value cyclically in addi-
tion to transmission when updating.
Collective feedback must be enabled and the feedback type set to "Active mes-
sage object".
■ Set the parameter "Cyclical transmission of feedback telegram?" to "yes".
Cyclical transmission is activated.
■ Set the parameter "Cyclical transmission of the collective feedback ?" to
"no".
SpaceLogic KNX Valve Drive Controller Summer/winter switch-over for valve outputs
43 | MTN6730-0002 11.08.2020
Cyclical transmission is deactivated, which means that collective feedback
is only transmitted to the bus if one of the valve states changes.
The cycle time for all cyclic feedback telegrams is defined centrally on the para-
meter page "General".
During an active delay, no collective feedback telegram will be transmitted even if a
valve state changes.
9.6 Summer/winter switch-over for valve
outputs
The actuator possesses a summer / winter switchover. Depending on the season,
this allows the setting of different command value setpoints for a valve output for
emergency operation or forced position. Summer or winter mode is directly preset
by the 1-bit communication object "Summer / winter switch-over". The telegram po-
larity can be configured in the ETS.
The "Summer" or "Winter" state preset via the object is stored internally in the
device and is restored after a device reset. In the ETS, it is possible to configure
whether, after an ETS programming operation, the saved value is restored or, al-
ternatively, if a defined operation (summer or winter) is activated.
It is also possible to switch the operating mode during active emergency operation
(if called by command value monitoring) or during an active forced position (if activ-
ated via the object). In this case, the value belonging to the operating mode is ac-
tivated immediately after the switch-over. If the value for emergency operation or
the forced position is polled on a bus/mains voltage return or after an ETS pro-
gramming operation, the command values do not change when the operating
mode is switched over.
Enable summer / winter switch-over
The summer / winter switch-over must first be enabled on the "General" parameter
page, so that it is possible to switch between summer and winter mode during ac-
tuator operation.
■ Set the "Summer/winter mode switch-over ?" parameter to "yes". Configure
the parameter "Polarity of 'Summer / winter switch-over' object" to the re-
quired telegram polarity.
The summer / winter switch-over is enabled. The communication object
"Summer / winter switch-over" becomes visible in the ETS. Summer and
winter command values can be configured for emergency operation and a
forced position for the valve outputs.
■ Set the "Summer/winter mode switch-over ?" parameter to "no".
The summer / winter switch-over is not available. For the valve outputs, only
one command value can be configured separately for emergency operation
or a forced position.
Define the behaviour after of the summer / winter
switch-over during an ETS programming operation
The "Summer" or "Winter" state preset via the object "Summer / winter switch-over"
is stored internally in the device and is restored after a device reset (bus or mains
voltage return). The parameter "Operating mode after ETS programming operation"
on the parameter page "General valve outputs" also defines which operating mode
is active after ETS commissioning.
SpaceLogic KNX Valve Drive Controller
Heat requirement and largest command value for
valve outputs
44 | MTN6730-0002 11.08.2020
■ Set the parameter to "Summer mode".
In this setting, the actuator activates summer operation after an ETS pro-
gramming operation. This overwrites the value saved internally in the
device.
■ Set the parameter to "winter mode".
In this setting, the actuator activates winter mode after an ETS program-
ming operation. This overwrites the value saved internally in the device.
■ Set the parameter to "No change (saved operating mode)".
In this configuration, the actuator activates the most recently saved operat-
ing mode.
The operating mode tracked after bus/mains return or preset after an ETS program-
ming operation is not tracked in the communication object by the actuator.
9.7 Heat requirement and largest command
value for valve outputs
Heat requirement control
The heating actuator possesses heat requirement control. Here, the actuator con-
tinuously evaluates the command values of assigned outputs and makes general
heat requirement information available as a 1-bit control value in the form of limit-
ing value monitoring with hysteresis. Using a KNX switch actuator, this allows the
energy-efficient activation of burner and boiler controllers with suitable control in-
puts (e.g. requirement-orientated switch-over between the reduction and comfort
setpoint in a central combi boiler).
A heat requirement is only signalled by the actuator via the object of the same
name when at least one command variable of the assigned outputs exceeds a lim-
iting value with hysteresis defined in the ETS. A heat requirement signal is retrac-
ted when the limiting value is reached or undershot again (see figure 7). The tele-
gram polarity of the heat requirement information can be configured.
In addition, valve outputs, which receive preset command values via the data
format "Switching (1-bit)" and "Switching (1-byte) with command value limiting
value", influence the heat requirement control. In the case of "Switching (1-bit)", an
"OFF" command value is interpreted as "0 %" and an "ON" command value as "100
%". In the case of "Switching (1-byte) with command value limiting value", the actu-
ator evaluates the converted switching output signal in the same way ("OFF" is in-
terpreted as "0 %", "ON" is interpreted as "100 %").
With some functions and events, valve outputs, which are configured to the com-
mand value data formats "Switching (1-bit)" and "Switching (1-byte) with command
value limiting value", are always activated via a constant command value through
pulse width modulation (PWM), providing that command values not equal to 0 % or
100 % are to be set (after bus voltage return, after an ETS programming operation,
during manual operation, with an active forced position and with active emergency
operation). PWM keeps being executed until the named functions have been exited
or, after the named events, no more lower-level functions are active and a new
command value telegram is received via the bus, overriding the constant command
value on the valve output.
In this case, the constant command value set by the PWM is also included in the
heat requirement control.
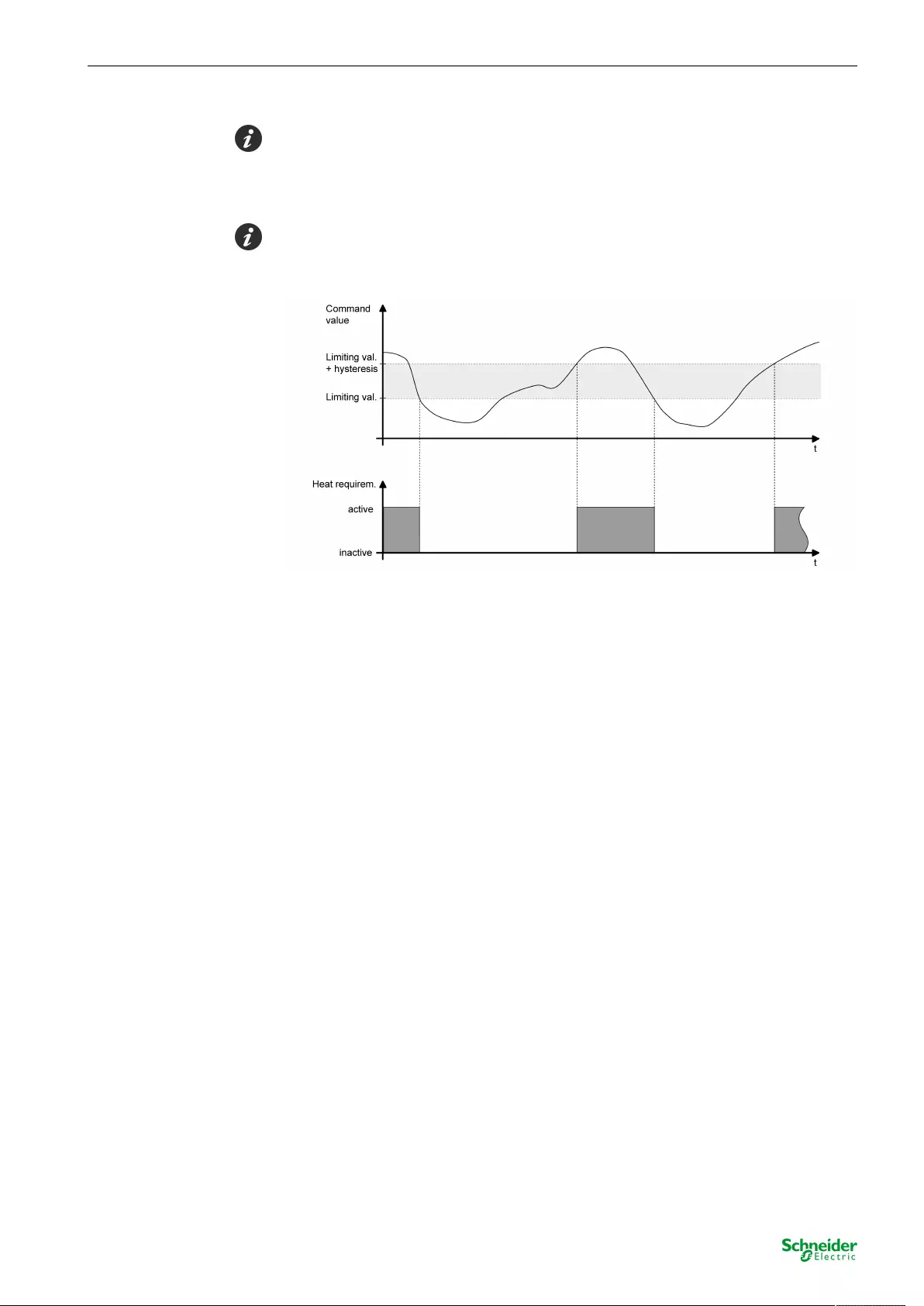
SpaceLogic KNX Valve Drive Controller
Heat requirement and largest command value for
valve outputs
45 | MTN6730-0002 11.08.2020
After bus voltage return and an ETS programming operation, the actuator always
first transmits the status "No heat requirement" without a delay. The actuator then
updates the status to "Heat requirement", providing that the condition for this has
been fulfilled and an optionally configured "Heat requirement ACTIVE" has elapsed.
A valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influ-
ence the heat requirement control.
Image7: Heat requirement information with sample command value characteristic
Optionally, the actuator can evaluate an external telegram for heat requirement in-
formation (e.g. from another heating actuator). This allows the cascading of mul-
tiple actuators with a heat requirement signal. The local heating actuator links the
1-bit telegram value of "External heat requirement" object with the internal state of
its own heat requirement logically as OR and outputs the result of this link via the
object "Heat requirement". The telegram polarity of the external object is fixed:
"0" = Heat requirement INACTIVE, "1" = Heat requirement ACTIVE.
The actuator only outputs the telegram of an active heat requirement after determ-
ination when the delay time defined by the parameter "Delay heat requirement IN-
ACTIVE" has elapsed. No heat requirement request is transmitted if the actuator
no longer determines a heat requirement within the preset time.
The actuator only retracts heat requirement information after determination when
the delay time defined by the parameter "Delay heat requirement INACTIVE" has
elapsed. The heat requirement information is not retracted if the actuator no longer
determines a new heat requirement within the preset time.
Enabling and configuring the Heat requirement
function
The Heat requirement function must first be enabled on the "Valves / Pump" para-
meter page, so that it can be used during actuator operation.
■ Set the parameter "Activate function 'Heat requirement' ?" to "yes". Config-
ure the parameter "Polarity of 'Summer Heat requirement' object" to the re-
quired telegram polarity. In addition, define the limiting value and hysteresis.
Heat requirement control is activated. The heat requirement information be-
comes active according to the set telegram polarity, if at least one command
value of the assigned valve outputs exceeds the configured limiting value
plus hysteresis. The heat requirement becomes inactive when the limiting
value is reached or undershot again.

SpaceLogic KNX Valve Drive Controller
Heat requirement and largest command value for
valve outputs
46 | MTN6730-0002 11.08.2020
The valve outputs must be assigned to the heat requirement control indi-
vidually on the parameter pages "Ax - Assignments", so that they are in-
cluded in the requirement determination.
■ Set the parameter "Activate function 'Heat requirement' ?" to "no".
Heat requirement control is not available.
Enabling detection of an external heat requirement
Optionally, the actuator can evaluate an external telegram for heat requirement in-
formation (e.g. from another heating actuator). This allows the cascading of mul-
tiple actuators with a heat requirement signal.
The object must be enabled for an external heat requirement to be recorded.
■ Set the parameter "Record external heat requirement ?" to "yes".
The "External heat requirement" object is enabled. The local heating actu-
ator links the 1-bit telegram value of this object with the internal state of its
own heat requirement logically as OR and outputs the result of this link via
the object "Heat requirement".
■ Set the parameter "Record external heat requirement ?" to "no".
Detection of an external heat requirement is not possible. The actuator only
determines the heat requirement information itself.
Cyclical telegrams to the object "External heat requirement" with an identical tele-
gram polarity (ON -> ON, OFF -> OFF) cause no reaction.
After a device reset, there is no polling of the current status of the object "External
heat requirement". Only when a bus telegram is received does the actuator take
this status into account during evaluation of the heat requirement.
Largest command value
Through evaluation and determination of the largest command value in the heating
or cooling system, the actuator allows influencing of the energy consumption of a
housing or commercial building. The information on the largest active 1-byte com-
mand value can be made available to suitable calorific furnaces with integrated
KNX controller directly via a KNX telegram, for example, to determine the optimum
flow temperature. If the function is enabled, the heating actuator evaluates all the
active 1-byte command values of the valve outputs and transmits the externally re-
ceived largest command value if there is a change by the interval preset in the ETS
or cyclically via the object "Largest command value".
In the case of valve outputs configured in the ETS to the command value data
formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting
value", there is no evaluation of the command values preset via the bus.
Exception: It may also occur with such command value outputs that a constant
command value is active (after bus voltage return, after an ETS programming oper-
ation, during manual operation, with an active forced position and with active emer-
gency operation). In this case, this constant command value is also included in the
calculation of the largest command value until the named functions with a higher
priority are exited or a new command value telegram is received via the bus, over-
riding the constant command value at the valve output.
SpaceLogic KNX Valve Drive Controller
Heat requirement and largest command value for
valve outputs
47 | MTN6730-0002 11.08.2020
After bus voltage return and an ETS programming operation, the actuator transmits
the current value of the largest command value without a delay, providing that auto-
matic transmission on change is configured. After a full device reset, the actuator
does not transmit automatically, when all the command values are set to 0 %.
After a device reset, the actuator immediately starts the time for cyclical transmis-
sion (if configured), so that the object value effective after the reset is transmitted
cyclically.
A valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influ-
ence the evaluation of the largest command value.
Optionally, the actuator can evaluate an external telegram for the largest command
value (e.g. from another heating actuator). This allows the cascading of multiple
actuators with a command value signal. The local heating actuator compares the 1-
byte telegram value of the object "External largest command value" with its own
largest command value and outputs the largest value via the object "Largest com-
mand value".
Enabling the "Largest command value" function
The "Largest command value" function must first be enabled on the "Valves /
Pump" parameter page, so that it can be used during actuator operation.
■ Set the parameter "Activate 'Largest command value' function ?" to "yes".
The "Largest command value" function is activated. The actuator always
compares the 1-byte command values of assigned valve outputs and sig-
nals the largest command value via the communication object of the same
name.
■ Set the parameter "Activate 'Largest command value' function ?" to "no".
The function for transferring the largest command value is not available.
Configuring the transmission behaviour of the
"Largest command value" function
The largest command value determined by the heating actuator is actively trans-
mitted to the bus. The "Transmit largest command value" parameter decides when
a telegram is transmitted via the "Largest command value" object.
■ Set the parameter to "Only on change". Configure the parameter "Transmit
on change by" to the required change interval for automatic transmission.
A telegram is only transmitted when the largest command value changes by
the configured change interval.
■ Set the parameter to "Only cyclical".
The actuator only transmits the "Largest command value" telegram cyclic-
ally. The cycle time is defined globally for all feedback on the parameter
page "General".
■ Set the parameter to "On change and cyclically". Configure the parameter
"Transmit on change by" to the required change interval for automatic trans-
mission.
The actuator transmits the "Largest command value" telegram cyclically and
also when the largest command value changes by the configured change
interval.
SpaceLogic KNX Valve Drive Controller Pump control for valve outputs
48 | MTN6730-0002 11.08.2020
Enabling recording of an external largest command
value
Optionally, the actuator can evaluate an external telegram for the largest command
value (e.g. from another heating actuator). This allows the cascading of multiple
actuators with a command value signal.
The object must be enabled for an external largest command value to be recorded.
■ Set the "Record external largest command value ?" to "yes".
The "External largest command value" object is enabled. The local heating
actuator compares the 1-byte telegram value of this object with its own
largest command value and outputs the largest value via the object "Largest
command value".
■ Set the "Record external largest command value ?" to "no".
Recording of an external largest command value is not possible. The actu-
ator independently determines the largest command value of the valve out-
puts assigned to it.
Cyclical telegrams to the "External largest command value" object with the same
telegram value cause no reaction.
After a device reset, there is no polling of the current status of the "External largest
command value" object. Only when a bus telegram is received does the actuator
take this value into account during evaluation of the largest command value.
9.8 Pump control for valve outputs
The heating actuator allows switching activation of the circulation pump of the heat-
ing or cooling circuit via a 1-bit KNX telegram. When using the pump controller, the
pump is only switched on by the actuator via the "Switch pump" object, when at
least one command variable of the assigned outputs exceeded a limiting value with
hysteresis defined in the ETS. The pump is switched off when the limiting value is
reached or undershot again (see figure 8). This saves electrical energy, as the
pump is only activated by sufficiently large, and thus effective, command values.
Optional cyclical anti-sticking protection prevents the sticking of the pump, if it has
not been switched on by the command value evaluation for a longer period of time.
The telegram polarity of the pump control can be configured.
In addition, valve outputs, which receive preset command values via the data
format "Switching (1-bit)" and "Switching (1-byte) with command value limiting
value", influence the pump control. In the case of "Switching (1-bit)", an "OFF" com-
mand value is interpreted as "0 %" and an "ON" command value as "100 %". In the
case of "Switching (1-byte) with command value limiting value", the actuator evalu-
ates the converted switching output signal in the same way ("OFF" is interpreted as
"0 %", "ON" is interpreted as "100 %").
With some functions and events, valve outputs, which are configured to the com-
mand value data formats "Switching (1-bit)" and "Switching (1-byte) with command
value limiting value", are always activated via a constant command value through
pulse width modulation (PWM), providing that command values not equal to 0 % or
100 % are to be set (after bus voltage return, after an ETS programming operation,
during manual operation, with an active forced position and with active emergency
operation). PWM keeps being executed until the named functions have been exited
or, after the named events, no more lower-level functions are active and a new
command value telegram is received via the bus, overriding the constant command
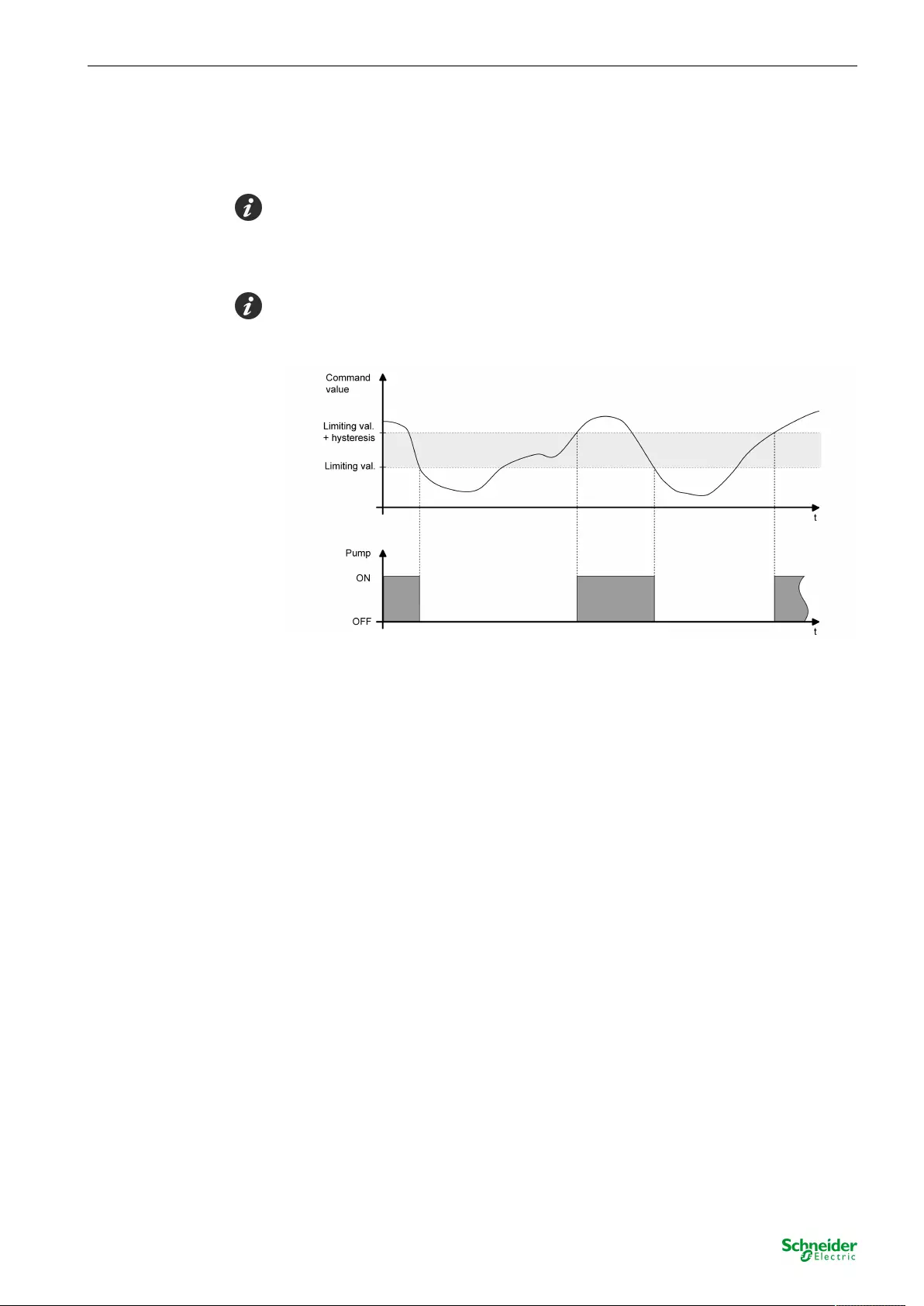
SpaceLogic KNX Valve Drive Controller Pump control for valve outputs
49 | MTN6730-0002 11.08.2020
value on the valve output.
In this case, the constant command value set by the PWM is also included in the
pump control.
After bus voltage return and an ETS programming operation, the actuator always
first transmits the status "Pump OFF" without a delay. The actuator then updates
the status to "Pump ON", providing that the condition for this has been fulfilled and
an optionally configured "Pump delay ACTIVE" has elapsed.
A valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influ-
ence the pump control.
Image8: Pump control with sample command value characteristic
Optionally, the actuator can evaluate an external pump control signal (e.g. from an-
other heating actuator). This allows the cascading of multiple actuators with pump
control. The local heating actuator links the 1-bit telegram value of the "External
pump control" object with the internal state of the pump logically as OR and outputs
the result of this link via the "Switch pump" object. The telegram polarity of the ex-
ternal object is fixed: "0" = Pump OFF, "1" = Pump ON.
The actuator only outputs the ON telegram to the pump after determination when
the defined delay time has elapsed. The pump is not switched on when the actu-
ator determines within the preset time that the pump must remain switched off, due
to a limiting value plus hysteresis again being undershot.
The actuator only outputs the OFF telegram to the pump after determination when
the defined delay time has elapsed. The pump is not switched on when the actu-
ator determines within the preset time that the pump must remain switched off, due
to a limiting value again being exceeded.
The delay times of the pump controller can be used as an example to match the
running time of the pump to the reaction time of the actuated actuators. Thus, a
pump should only switch on when the actuators actually open after electrical activ-
ation by the actuator (match pump ACTIVE delay with the dead time of the actuat-
ors). The same applies to the closing of the valve drives.
If pump control is enabled, optional cyclical anti-sticking protection can prevent the
sticking of the pump, if it has not been switched on by the command value evalu-
ation for a longer period of time (e.g. in the case of heating systems in the summer
months). When anti-sticking protection is enabled, the parameter "Time for cyclical
switching on of the pump" defines the weekly interval of the protection function. If
the pump is not switched on at least once during the set time by the pump control-
ler, then the actuator will executed anti-sticking protection, if necessary on a regu-
lar basis. The cycle time is reset and restarted on each actuation of the pump by
SpaceLogic KNX Valve Drive Controller Pump control for valve outputs
50 | MTN6730-0002 11.08.2020
the pump control. The cycle time is started for the first time after a device reset.
When anti-sticking protection is enabled, the parameter "Pump switch-on time"
defines the length of pump running for the cyclical protection function. The actuator
then switches the pump on for the set time without interruption, assuming that anti-
sticking protection must be executed.
Enabling and configuring the pump control function
The pump control must first be enabled on the "Valves / Pump" parameter page, so
that it can be used during actuator operation.
■ Set the "Activate 'Pump control' function ?" parameter to "yes". Configure
the parameter "Polarity of 'Pump control' object" to the required telegram
polarity. In addition, define the limiting value and hysteresis.
Pump control is activated. The pump is switched on according to the set
telegram polarity, if at least one command value of the assigned valve out-
puts exceeds the configured limiting value plus hysteresis. The pump is
switched off when the limiting value is reached or undershot again.
The valve outputs must be assigned to the pump control individually on the
parameter pages "Ax - Assignments", so that they are included in the com-
mand value evaluation.
■ Set the "Activate 'Pump control' function ?" parameter to "no".
Pump control is not available.
Enabling detection of an external pump control
Optionally, the actuator can evaluate an external telegram for pump control (e.g.
from another heating actuator). This allows the cascading of multiple actuators with
pump control.
The object must be enabled for an external pump control signal to be detected.
■ Set the parameter "Detect external pump control ?" to "yes".
The "External pump control" object is enabled. The local heating actuator
links the 1-bit telegram value of this object with the internal state of its own
pump control logically as OR and outputs the result of this link via the
"Switch pump" object.
■ Set the parameter "Detect external pump control ?" to "no".
Recording of an external pump control signal is not possible. The actuator
only controls the pump itself.
Cyclical telegrams to the "External pump control" object with an identical telegram
polarity (ON -> ON, OFF -> OFF) cause no reaction.
After a device reset, there is no polling of the current status of the "External pump
control" object. Only when a bus telegram is received does the actuator take this
status into account when controlling the pump.
Configuring the anti-sticking protection of the pump
controller
If pump control is enabled, optional cyclical anti-sticking protection can prevent the
sticking of the pump, if it has not been switched on by the command value evalu-
ation for a longer period of time. The anti-sticking protection must first be enabled
on the "Valves / Pump" parameter page, so that it can be executed during actuator
operation.
SpaceLogic KNX Valve Drive Controller Failure of the valve operating voltage
51 | MTN6730-0002 11.08.2020
■ Set the "Activate anti-sticking protection ?" parameter to "yes". In addition,
define the interval of the protection function in the parameter "Time for cyc-
lical switching on of the pump". Configure the parameter "Pump switch-on
time" to the required length of the pump run.
Anti-sticking protection is activated. If the pump is not switched on at least
once during the set time by the pump controller, then the actuator will ex-
ecuted anti-sticking protection, if necessary on a regular basis. The actuator
then switches the pump on for the preset switch-on time.
■ Set the "Activate anti-sticking protection ?" parameter to "no".
Anti-sticking protection is deactivated.
Once started, the anti-sticking protection always runs through to the end. It cannot
be cancelled prematurely through the reception of new command values and the
resulting restart of the cycle time.
9.9 Failure of the valve operating voltage
To activate the valve drives, the actuator requires a separate operating voltage
supply (AC 24 V or AC 230 V). Valve outputs can only be electrically activated
when the valve operating voltage supply is switched on. If there is no valve voltage
supply, then the drives will move to their idle position (deenergised opened /
closed). To prevent a failure of the valve voltage supply at the actuator from going
undetected, a 1-bit fault signal can be optionally transmitted to the bus via the ob-
ject "Failure of operating voltage". The telegram polarity of this fault signal can be
configured.
If the actuator detects that there is no valve voltage, then the failure telegram
("Voltage failed") is transmitted immediately. Only when the valve voltage has been
reconnected will the actuator retract the fault signal ("Voltage available").
A valve which has been completely opened (deenergised opened) by the failure of
the valve operating voltage is not include in the determination of heat requirement
or the "Largest command value" and has no influence on the pump control.
Enabling the signal "Failure of the valve operating
voltage"
The failure signal on the valve operating voltage must first be enabled on the
"Valves / Pump" parameter page, so that it can be evaluated during actuator opera-
tion.
■ Set the "Signal operating voltage failure of the valves?" parameter to "yes".
Configure the parameter "Polarity of 'Failure of operating voltage' object" to
the required telegram polarity.
The failure signal is enabled. The actuator actively transmits a "Voltage
failed" telegram when it detects a failed or switched-off valve voltage supply,
when the bus voltage supply is still switched on. The actuator transmits a
"Voltage available" telegram as soon as the valve voltage supply is avail-
able again and the bus voltage is switched on.
■ Set the "Signal operating voltage failure of the valves?" parameter to "no".
The failure signal is not available.

SpaceLogic KNX Valve Drive Controller Internal group communication
52 | MTN6730-0002 11.08.2020
Setting the behaviour of the failure signal on bus
voltage return
The object for the transmission of a failure of the valve operating voltage can act-
ively transmit the feedback information after a bus voltage return and an ETS pro-
gramming operation. As an option, it is possible to configure in the ETS whether
active telegram transmission should take place after a device reset or not.
After a device reset, the failure signal of the valve operating voltage supply can be
optionally time-delayed with the delay being preset globally for all device feedback
together on the "General" parameter page.
■ Set the "Send feedback after bus voltage return ?" parameter to "yes".
The feedback "Failure of operating voltage" is transmitted actively after bus
and mains voltage return, after just bus voltage return or after programming
in ETS.
■ Only on "Send feedback after bus voltage return ?" = "Yes": Set the para-
meter "Time delay for feedback after bus voltage return ?" to "yes".
The feedback "Failure of operating voltage" is transmitted with a delay after
bus and mains voltage return, after just bus voltage return or after program-
ming in ETS. No feedback is transmitted during a running time delay, even if
the state changes.
■ Only on "Send feedback after bus voltage return ?" = "Yes": Set the para-
meter "Time delay for feedback after bus voltage return ?" to "no".
The feedback "Failure of operating voltage" is transmitted immediately after
bus / mains voltage return or after an ETS programming operation.
■ Set the "Send feedback after bus voltage return ?" parameter to "no".
The feedback is not transmitted automatically after a device reset.
Setting cyclical transmission of the failure signal
The signal telegram "Failure of operating voltage" can be transmitted cyclically,
should the actuator determine a failed valve operating voltage. If the valve operat-
ing voltage exists, then transmission is generally not cyclical.
■ Set the "Cyclical transmission of the feedback if no voltage present ?" para-
meter to "yes".
The actuator repeats the signal telegram "Failure of operating voltage",
should a failed valve operating voltage have been determined. The cycle
time is defined for all feedback on the "General" parameter page.
■ Set the "Cyclical transmission of the feedback if no voltage present ?" para-
meter to "no".
The signal telegram "Failure of operating voltage" is generally not repeated
cyclically.
During a delay after bus/mains voltage return or an ETS programming operation,
transmission is not cyclical.
9.10 Internal group communication
The actuator contains up to 6 room temperature controllers (RTC), which are integ-
rated in the device software and which work independently of the process. The
command value outputs of these controllers can be internally linked to the elec-
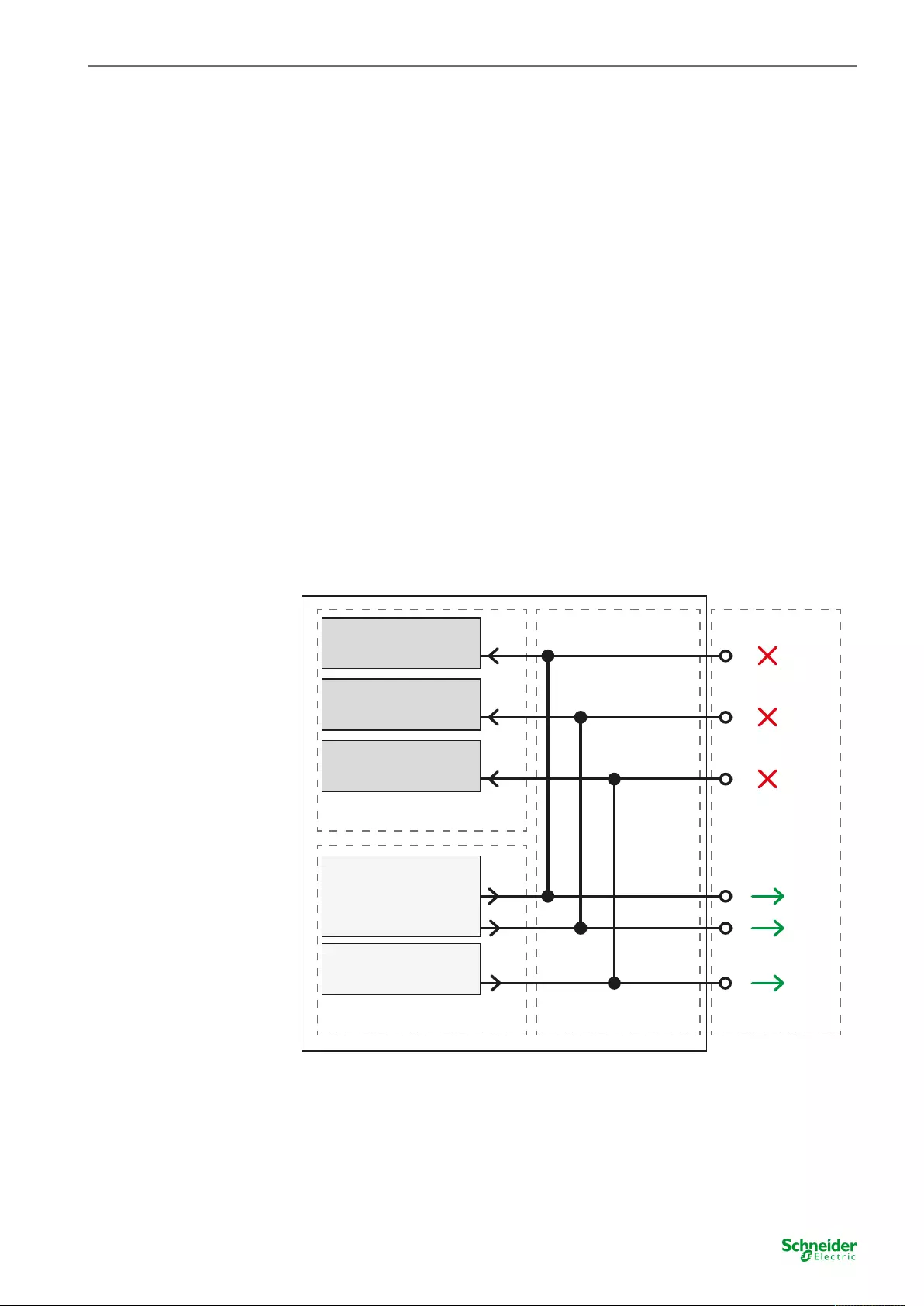
SpaceLogic KNX Valve Drive Controller Internal group communication
53 | MTN6730-0002 11.08.2020
tronic valve outputs of the actuator, meaning that temperature control and valve ac-
tivation can take place using just one bus device, if required. This function is imple-
mented through special internal group communication.
Internal group communication interconnects device functions, without using ex-
ternal group addresses which are linked to communication objects. This means
that it is possible to link any command value outputs of the internal controller with
the valve outputs of the actuator via parameters in the application program. The
precondition is that the data formats (1-bit / 1-byte) of the command value inputs
and outputs to be linked are identical. The actual linking takes place via internal
group addresses, which are linked to any possible command value.
If internal group communication is to be used, then this must be enabled centrally
on the "General" parameter page. If the enabling is granted, the command value in-
puts of the up to 6 valve outputs can each be assigned to an internal command
value. Here, it is first necessary to select to which controller (1...6) a valve output
should be assigned. Assignment takes place using the parameter "Output reacts to
command value of" on the parameter page "Output x -> Ax - General -> Ax - Com-
mand value/Status/Operating mode". In the "No internal command value" setting,
the internal group communication of the selected valve output is deactivated.
In the second step, the required command value of the selected controller must be
selected using the parameter "Command value for valve output". This makes it
possible, depending on the application, to assign any valve outputs to available in-
ternal command values (see figure 9).
Valve output 2
command value (1 bit)
Controller 1
command value heating (1 bit)
command value cooling (1 bit)
Controller 2
command value (1 byte)
Valve output 3
command value (1 byte)
:
:
:
:
External objectsInternal assignment
[70]
Valve output 1
command value (1 bit)
[20]
[121]
[357]
[359]
[428]
Image9: Project design example for internal group communication
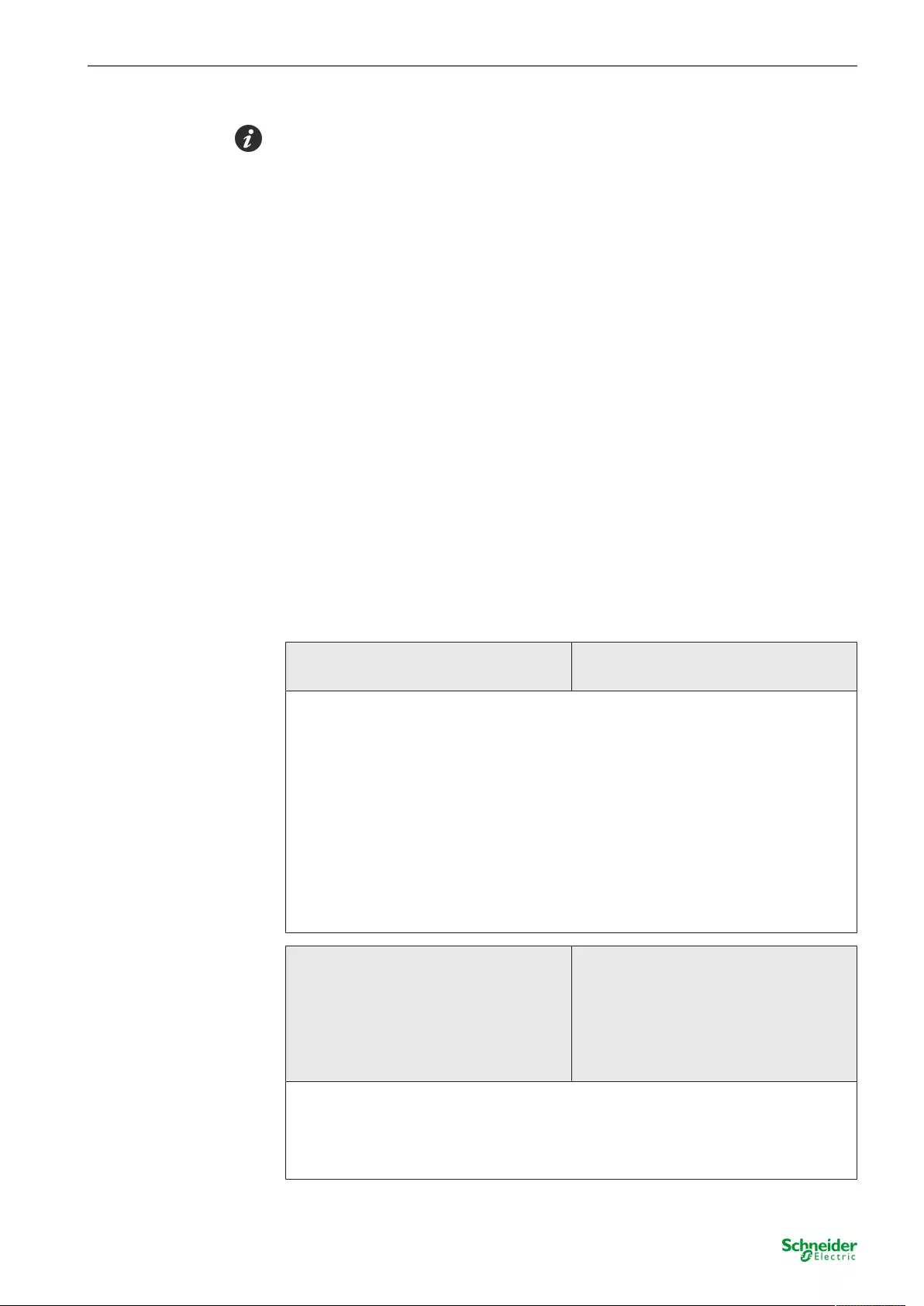
SpaceLogic KNX Valve Drive Controller Channel-independent parameters
54 | MTN6730-0002 11.08.2020
Each valve output can only be assigned to one command value. Command values
from controllers can only then be assigned to a valve output when the data formats
of the command value output (controller) and command value input (valve output)
match. The application program in the ETS only offers command values which
have the right data format.
Internal group communication uses internal group addresses to link the available
communication objects of valve outputs and controllers. This renders external link-
ing via group addresses superfluous. The internal group addresses are not directly
visible. Management takes place automatically using the application program.
The communication objects are visible as usual in the object view in the ETS pro-
ject.
In addition to internal group communication, it is possible to assign external group
addresses to the communication objects in the ETS project. This is sensible, for ex-
ample, if the command value outputs of the controllers are also to be sent to the
KNX, in order to include other KNX actuators in the control. Use of internal and ex-
ternal group communication is thus possible for sending objects.
Caution:
For objects receiving values or states from the bus, when using internal group
communication, prevent external communication from also taking place. It is there-
fore not permitted to link the 1-bit or 1-byte command value inputs of the valve out-
puts with external group addresses if internal command values have been as-
signed!
9.11 Channel-independent parameters
Setting the parameters of the outputs all outputs equal
each output individual
To simplify the configuration, all the valve outputs can be assigned to the same
parameters in the ETS and thus configured identically. This parameter stipulates
whether every valve output of the device can be configured individually or whether
all the outputs should be configured by the same parameters.
all outputs equalAll outputs equal: In the "All outputs equal" setting, the number of
parameters in the ETS is reduced. The visible parameters are then used on all the
valve outputs automatically. Only the communication objects can then be con-
figured separately for the outputs. This setting should be selected, for example, if
all the actuators behave identically and should only be activated by different group
addresses (e.g. in office blocks or in hotel rooms).
each output individually: In the parameter setting "Each output individually", each
valve output possesses its own parameter pages in the ETS.
Number of room temperature controllers
used
use no controllers
1 controllers
2 controllers
3 controllers
4 controllers
5 controllers
6 controllers
The actuator contains up to 6 room temperature controllers (RTC), which are in-
tegrated in the device software and which work independently of the process. This
allows the temperature to be set in up to 6 rooms or room areas to specified set-
points through independent control processes. The number of internal controllers
to be used is configured here.
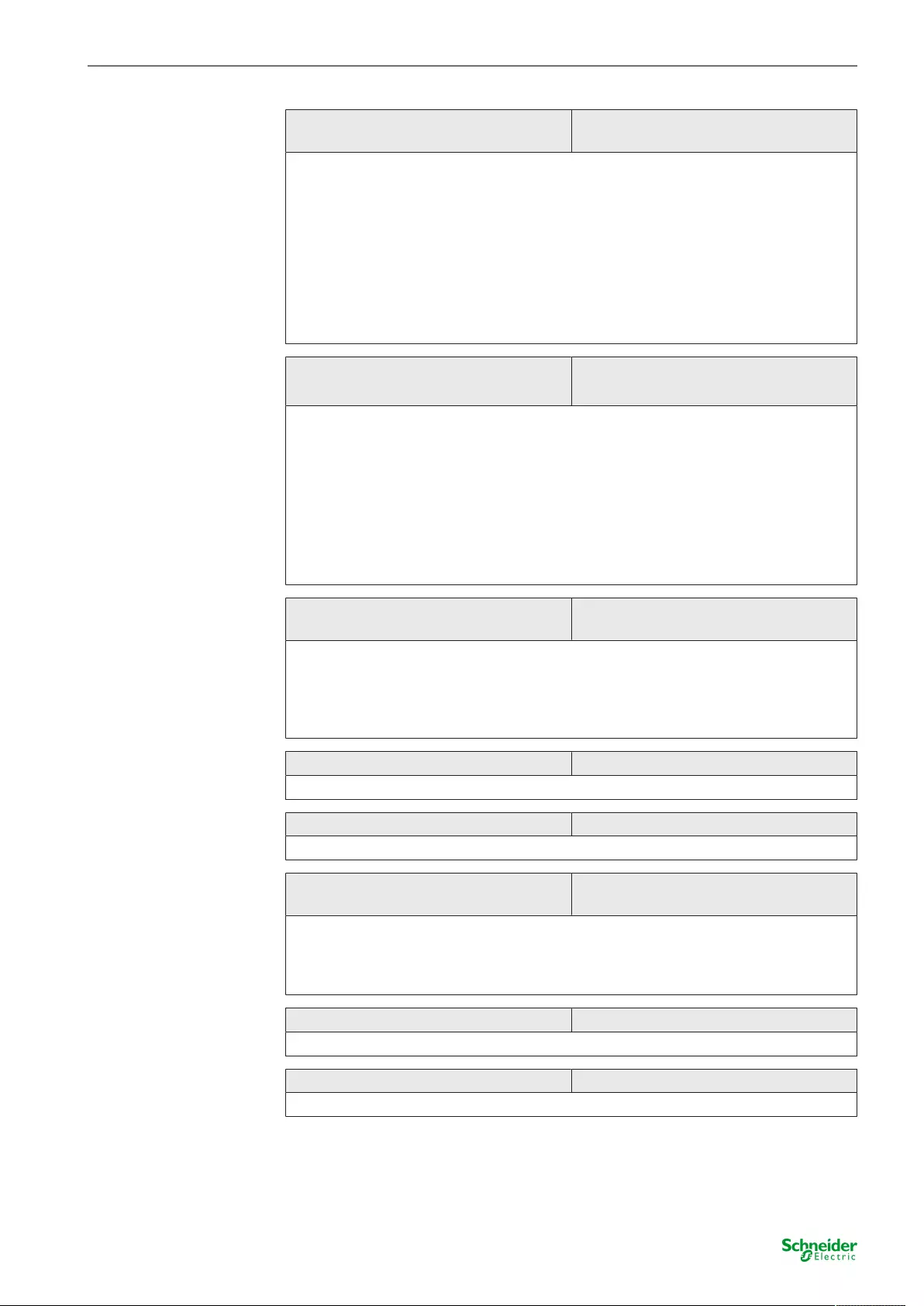
SpaceLogic KNX Valve Drive Controller Channel-independent parameters
55 | MTN6730-0002 11.08.2020
Use internal group communication? no
yes
The command value outputs of the internal controllers can be internally linked to
the electronic valve outputs of the actuator, meaning that temperature control and
valve activation can take place using just one bus device, if required. This function
is implemented through special internal group communication.
Internal group communication interconnects device functions, without using ex-
ternal group addresses which are linked to communication objects. This means
that it is possible to link any command value outputs of the internal controller with
the valve outputs of the actuator via parameters in the application program.
If internal group communication is to be used, then this must be enabled centrally
here.
Delay after bus voltage return Minutes
(0...59)
0...59
0...17...59
0...59: To reduce telegram traffic on the bus line after bus voltage switch-on (bus
reset), after connection of the device to the bus line or after an ETS programming
operation, it is possible to delay selected active feedback of the actuator. This
parameter defines a delay time independent of the channel for this case. Only
after the time configured here has elapsed are status or feedback telegrams for
initialisation transmitted to the bus, provided that the status and feedback func-
tions are to be transmitted after a delay.
Setting the delay time minutes.
0...17...59: Setting the delay time seconds.
Time for cycl. Time for cyclical transmis-
sion of feedback tel. Hours (0...23)
0...23
The transmitting feedback telegrams of the actuator can, depending on the para-
meterisation, also transmit their state cyclically to the bus. The parameter "Time
for cyclical transmission of feedback tel." generally defines the cycle time for all
valve outputs.
Setting the cycle time hours.
Minutes (0...59) 0…2...59
Setting the cycle time minutes.
Seconds (10...59) 10...59
Setting the cycle time seconds.
Time for cycl. transmission of operating
hours Hours (0...23)
0...23
The operating hours counters -depending on the parameterisation - can also
transmit their counter value cyclically to the bus. The parameter "Time for cyclical
transmission of feedback tel." generally defines the cycle time for all valve outputs.
Setting the cycle time hours.
Minutes (0...59) 0...59
Setting the cycle time minutes.
Seconds (10...59) 10...59
Setting the cycle time seconds.
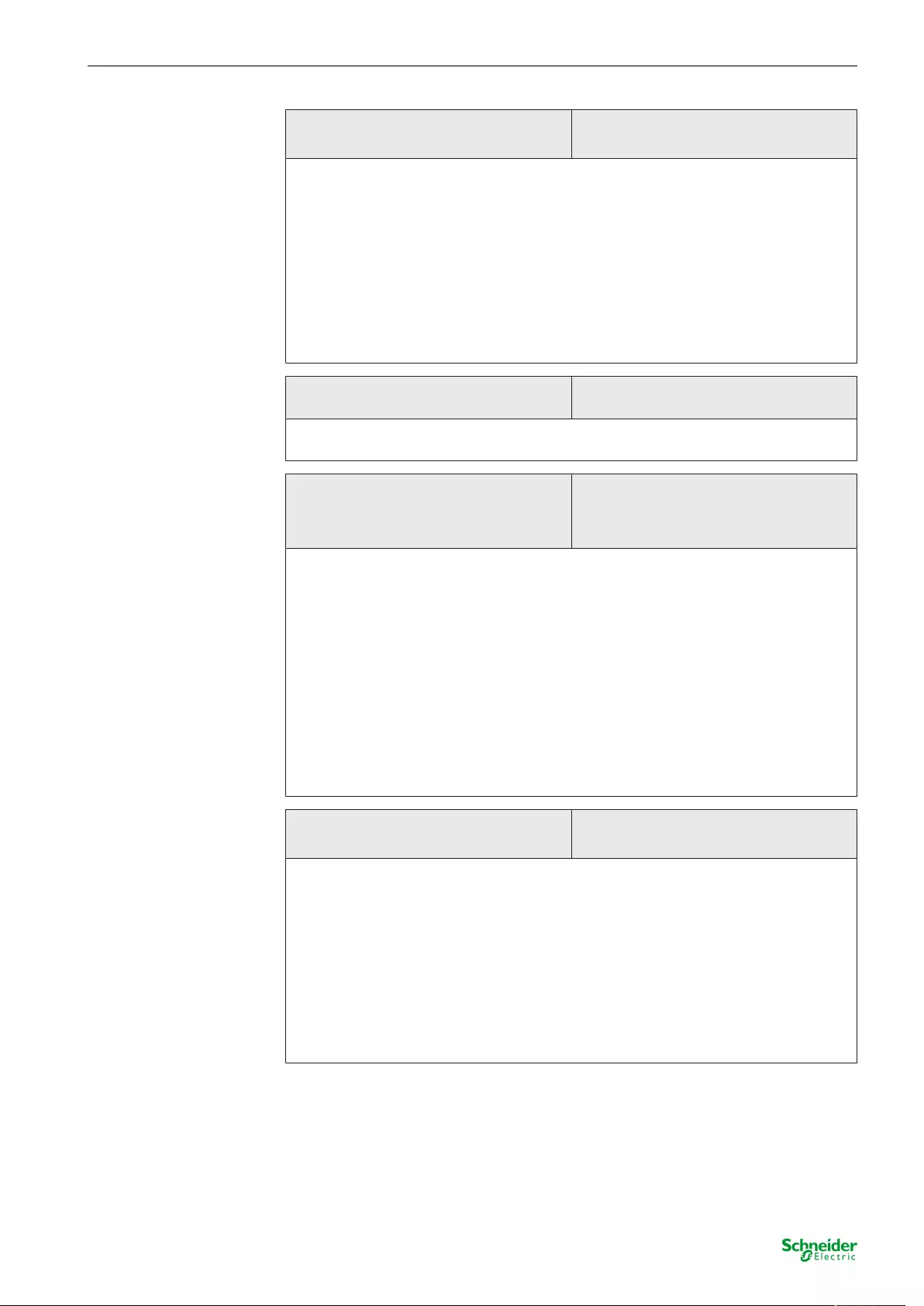
SpaceLogic KNX Valve Drive Controller Channel-independent parameters
56 | MTN6730-0002 11.08.2020
Summer/winter mode switch-over no
yes
The actuator possesses a summer / winter switchover. Depending on the season,
this allows the setting of different command value setpoints for a valve output for
emergency operation or forced position.
no: The summer / winter switch-over is not available. For the valve outputs, only
one command value can be configured separately for emergency operation or a
forced position.
yes: The summer / winter switch-over is enabled. The communication object
"Summer / winter switch-over" becomes visible in the ETS. Summer and winter
command values can be configured for emergency operation and a forced position
for the valve outputs.
Polarity of "Summer / winter switch-
over"" object
1 = Summer / 0 = Winter
1 = Winter / 0 = Summer
This parameter sets the telegram polarity of the "Summer / winter switch-over" ob-
ject. It is only visible when the summer / winter switch-over is enabled.
Operating mode after ETS programming Summer mode
Winter mode
no change (saved operating mode)
The "Summer" or "Winter" state preset via the object "Summer / winter switch-
over" is stored internally in the device and is restored after a device reset (bus or
mains voltage return). The parameter "Operating mode after ETS programming
operation" defines which operating mode is active after ETS commissioning.
summer operation: In this setting, the actuator activates summer operation after
an ETS programming operation. This overwrites the value saved internally in the
device.
winter operation: In this setting, the actuator activates winter operation after an
ETS programming operation. This overwrites the value saved internally in the
device.
no change (saved operating mode): In this configuration, the actuator activates the
most recently saved operating mode.
Use service mode ? no
yes
Service mode allows the bus-controlled locking of all or some valve outputs for
maintenance or installation purposes. If service mode is active, actuators can be
moved to a defined position (completely open or closed) and locked against activ-
ation by command value telegrams. Service mode must first be enabled here, so
that it can be activated and deactivated via the KNX during actuator operation.
no: Service mode is not available. No valve outputs can be assigned to service
mode in the ETS.
yes: Service mode is enabled. The communication object "Service mode - Deac-
tivate / activate input" becomes visible. Valve outputs can be assigned on the
parameter pages "Ax - assignments".

SpaceLogic KNX Valve Drive Controller Channel-independent parameters
57 | MTN6730-0002 11.08.2020
Behaviour at the end of the service
mode
no change
close all outputs completely
open all outputs completely
Track states
The parameter "Behaviour at the end of service mode" specifies the state to which
the affected valve outputs go on deactivating service operation. This parameter is
only visible when service operation is used.
Collect. feedbk status of value outputs
(opened / closed) ?
no
yes
After central commands or after bus/mains voltage return, a KNX line is generally
heavily loaded by data traffic as many bus devices are transmitting the state of
their communication objects by means of feedback telegrams. This effect occurs
particularly when using visualisations. Collective feedback can be used to keep
the telegram load low during initialisation.
no: Collective feedback is deactivated. No collective feedback object is available.
yes: Collective feedback is enabled. The collective feedback object becomes vis-
ible in the ETS.
Collective feedback type active signalling object
passive status object
Collective feedback can be provided in the function of an active signalling object
or a passive status object. In the case of an active signal object, the feedback is
automatically transmitted to the bus whenever the status contained therein
changes. In the function as a passive status object, there is no automatic telegram
transmission. In this case, the object value must be read out. The ETS automatic-
ally sets the object communication flags required for proper functioning.
This parameter is visible only if collective feedback is enabled.
Active status object: The actuator transmits the collective feedback automatically
when the object value is updated. After a device reset (ETS programming opera-
tion, bus and mains voltage return, only bus voltage return), current collective
feedback is always transmitted.
Passive status object: Collective feedback will only be transmitted in response if
the object is read out from the bus. No automatic telegram transmission of the col-
lective feedback takes place after bus or mains voltage return or after an ETS pro-
gramming operation.
Time delay for feedback after bus
voltage return ?
no
yes
If used as active signal object, the collective feedback is transmitted to the bus
after bus and mains voltage return, after just bus voltage return or after an ETS
programming operation. In these cases, the feedback can be time-delayed with
the time delay being preset globally for all device feedback together on the "Gen-
eral" parameter page.
This parameter is visible only if collective feedback is enabled.
no: The collective feedback is transmitted immediately after bus / mains voltage
return or after an ETS programming operation.
yes: The collective feedback telegram is transmitted with a delay after bus and
mains voltage return, after just bus voltage return or after programming in ETS. No
feedback is transmitted during a running time delay, even if a valve state changes.
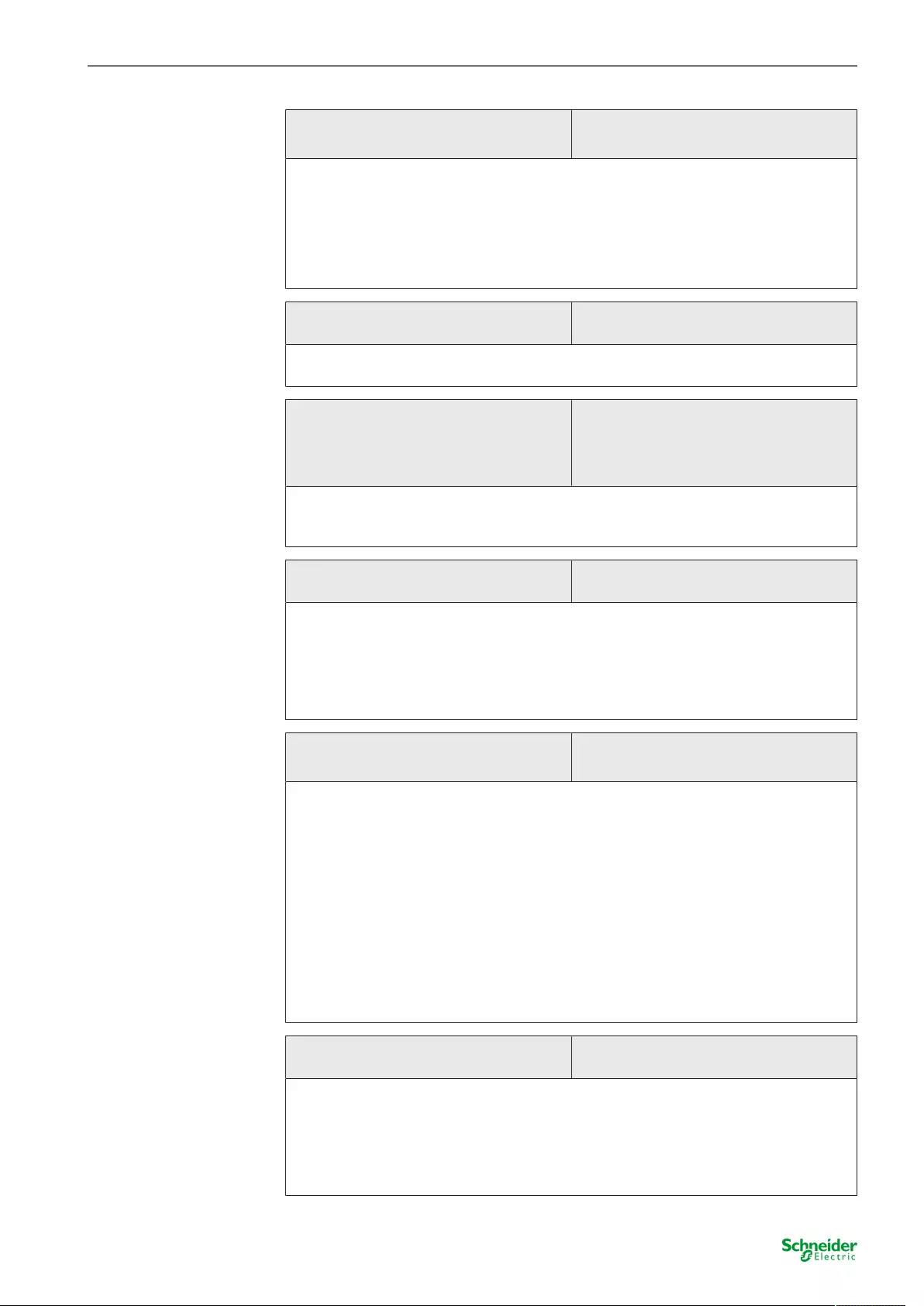
SpaceLogic KNX Valve Drive Controller Channel-independent parameters
58 | MTN6730-0002 11.08.2020
Cyclical transmission of the feedback ? no
yes
The object of the collective feedback can also transmit its value cyclically in addi-
tion to transmission when updating.
This parameter is visible only if collective feedback is enabled.
no: Cyclical transmission is deactivated, which means that collective feedback is
only transmitted to the bus if one of the valve states changes.
yes: Cyclical transmission is activated.
Signal operating voltage failure of the
valves?
no
yes
The actuator monitors the power supply of the actuators. On a failure, a 1-bit sig-
nal telegram can be transmitted. This parameter enables the feedback function.
Polarity of the object "Failure of operat-
ing voltage"
0 = Voltage present /
1 = Voltage failed
0 = Voltage failed /
1 = Voltage present
This parameter sets the telegram polarity of the signal telegram for the transmis-
sion of a failure of the valve operating voltage. It is only visible when "Signal oper-
ating voltage failure of the valves ?" = "Yes".
Send feedback after bus voltage return ? no
yes
The object for the transmission of a failure of the valve operating voltage can act-
ively transmit the feedback information after a bus voltage return and an ETS pro-
gramming operation. This parameter specifies whether active telegram transmis-
sion should take place after a device reset or not.
This parameter is only visible with "Signal operating voltage failure of the valves?"
= "Yes".
Time delay for feedback after bus
voltage return ?
no
yes
The feedback "Failure of operating voltage" is transmitted to the bus after bus and
mains voltage return, after just bus voltage return or after programming in ETS. In
these cases, the feedback can be time-delayed with the time delay being preset
globally for all device feedback together on the "General" parameter page.
This parameter is only visible if the signal function is enabled and transmission
after bus voltage return is enabled.
no: The feedback "Failure of operating voltage" is transmitted immediately after
bus / mains voltage return or after an ETS programming operation.
yes: The feedback "Failure of operating voltage" is transmitted with a delay after
bus and mains voltage return, after just bus voltage return or after programming in
ETS. No feedback is transmitted during a running time delay, even if the state
changes.
Cyclical transmission of the feedback if
no voltage present ?
no
yes
The signal telegram "Failure of operating voltage" can be transmitted cyclically,
should the actuator determine a failed valve operating voltage. This parameter
specifies whether cyclical telegram transmission should take place or not. If the
valve operating voltage exists, then transmission is generally not cyclical.
This parameter is only visible with "Signal operating voltage failure of the valves?"
= "Yes".
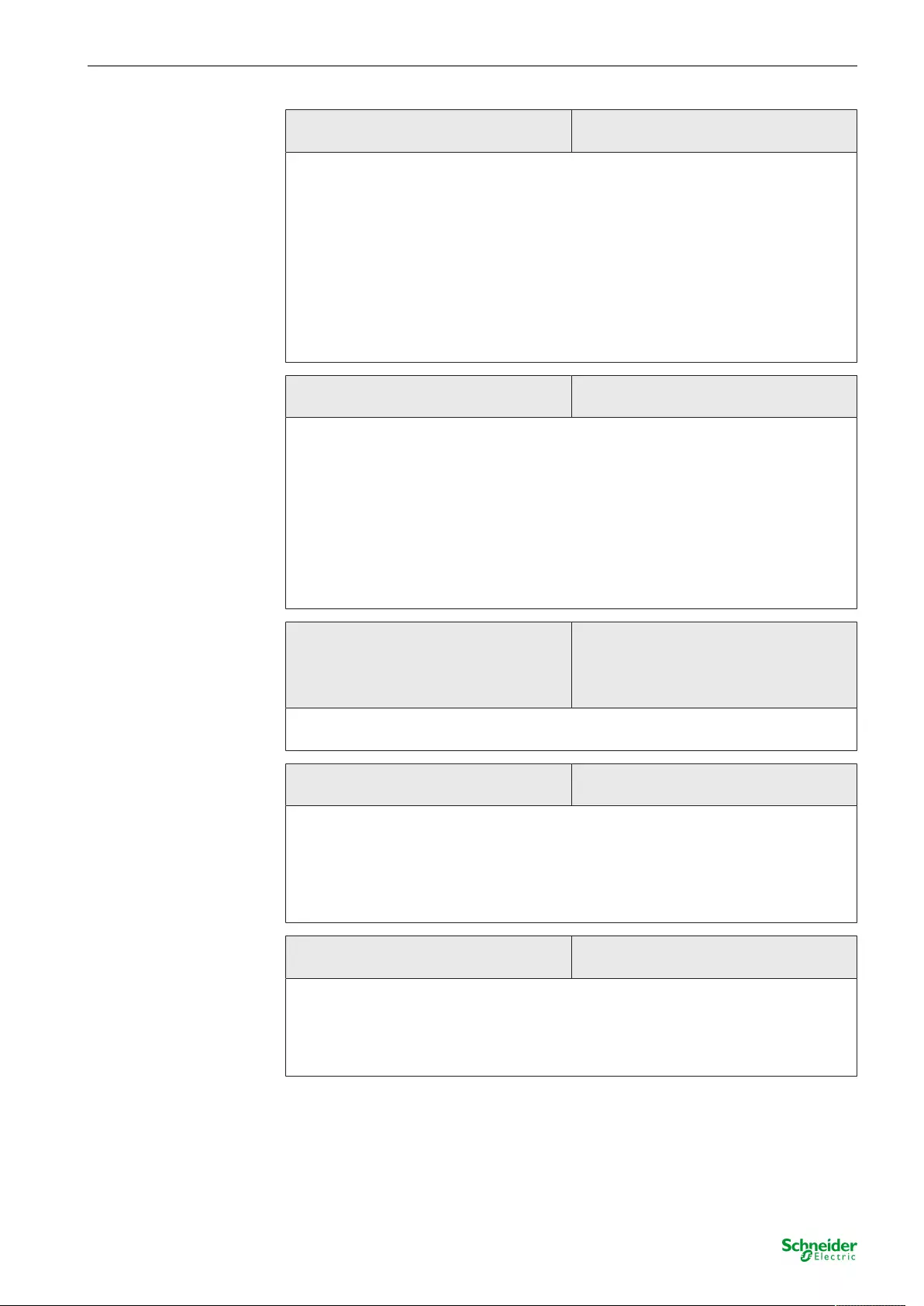
SpaceLogic KNX Valve Drive Controller Channel-independent parameters
59 | MTN6730-0002 11.08.2020
Global reset of all messages "short-cir-
cuit / overload" ?
no
yes
The actuator is able to detect an overload or a short-circuit at the valve outputs
and, in consequence, to protect them against destruction. Outputs which have ex-
perienced a short-circuit or a constant load are deactivated after an identification
period. In this case, a short-circuit or overload signal can be transmitted via a KNX
communication object.
This parameter defines whether a global and thus simultaneous reset of the short-
circuit / overload signals of all valve outputs is possible. In the "Yes" setting, the 1-
bit communication object "Reset short-circuit / Overload" is available.
Individual short-circuit / overload signals can only be reset via the object when the
testing cycle (waiting time and testing cycle time) of the affected valve outputs has
been completed.
Activate function "Heat requirement" ? no
yes
The heating actuator can even evaluate the command values of its outputs and
make general heat requirement available in the form of limiting value monitoring
with hysteresis (1 bit, switching). Using a KNX switch actuator, this allows the en-
ergy-efficient activation of burner and boiler controllers with suitable control inputs
(e.g. requirement-orientated switch-over between the reduction and comfort set-
point in a central combi boiler).
Here, the heat requirement control of the actuator can be enabled centrally ("yes"
setting). The valve outputs must be assigned to the heat requirement control indi-
vidually on the parameter pages "Ax - Assignments", so that they are included in
the requirement determination.
Polarity of "Heat requirement" object 0 = No heat requirement /
1 = Heat requirement
0 = Heat requirement /
1 = No heat requirement
This parameter defines the telegram polarity of the "Heat requirement" object. It is
visible only if the heat requirement function is enabled.
Record external heat requirement ? no
yes
The actuator is able to evaluate an external heat requirement (e.g. from another
heating actuator). The local heating actuator links the external telegram with the
internal status of its own heat requirement logically as OR and outputs the result
of this link via the object "Heat requirement".
In the "yes" setting, this parameter will enable the object "External heat require-
ment". It is visible only if the heat requirement function is enabled.
Limiting value minimum command value
for heat requirement (0...100 %)
0...100
The actuator only signals a heat requirement when at least one command value of
the assigned outputs exceeds the limiting value defined here plus the hysteresis
(see next parameter). A heat requirement signal is retracted when the limiting
value is reached or undershot again.
This parameter is visible only if the heat requirement function is enabled.
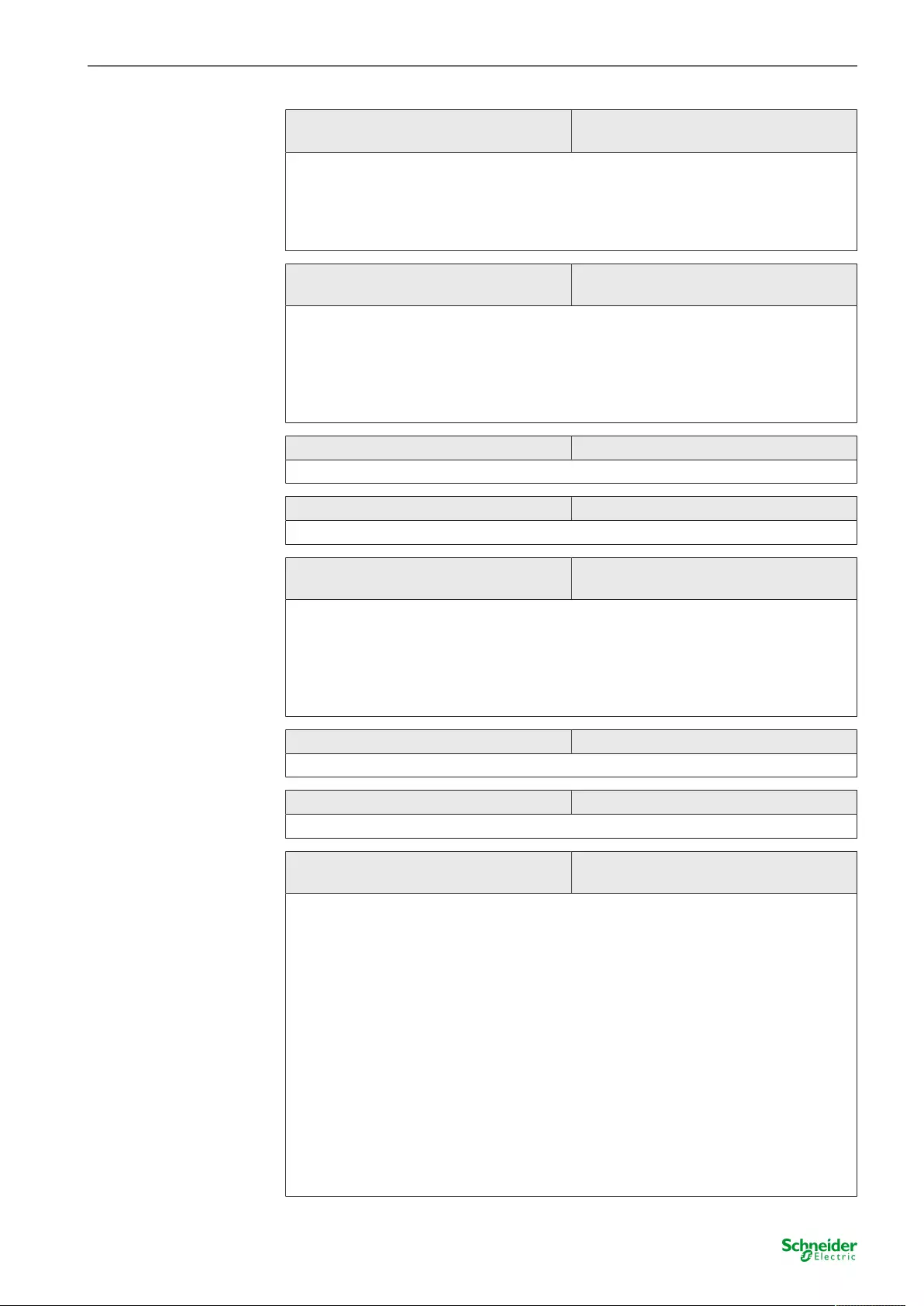
SpaceLogic KNX Valve Drive Controller Channel-independent parameters
60 | MTN6730-0002 11.08.2020
Hysteresis for limiting value minimum
command value (1...20 %)
1...10...20
This parameter specifies the hysteresis of the limiting value of the minimum com-
mand value of the heat requirement control. The actuator signals a heat require-
ment when a command value exceeds the defined limiting value plus the hyster-
esis defined here.
This parameter is visible only if the heat requirement function is enabled.
Delay heat requirement ACTIVE Hours
(0...23)
0...23
The actuator only outputs the telegram of an active heat requirement after determ-
ination when the delay time defined here has elapsed. No heat requirement re-
quest is transmitted if the actuator no longer determines a heat requirement within
the preset time. This parameter is visible only if the heat requirement function is
enabled.
Definition of the delay time hours.
Minutes (0...59) 0...5...59
Definition of the delay time minutes.
Seconds (0...59) 0...59
Definition of the delay time seconds.
Delay heat requirement INACTIVE
Hours (0...23)
0...23
The actuator only retracts heat requirement information after determination when
the delay time defined here has elapsed. The heat requirement information is not
retracted if the actuator no longer determines a new heat requirement within the
preset time. This parameter is visible only if the heat requirement function is en-
abled.
Definition of the delay time hours.
Minutes (0...59) 0...5...59
Definition of the delay time minutes.
Seconds (0...59) 0...59
Definition of the delay time seconds.
Activate "Largest command value" func-
tion ?
no
yes
The actuator can determine the largest constant command value and forward it to
another bus device (e.g. suitable calorific furnaces with integrated KNX control or
visualisation). In the "Yes" setting, the heating actuator evaluates all the active 1-
byte command values of the valve outputs and, optionally, the externally received
largest command value (object "External largest command value") and transmits
the largest command value via the "Largest command value" object.
In the case of valve outputs configured in the ETS to the command value data
formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting
value", there is no evaluation of the command values preset via the bus. Excep-
tion: It may also occur with such command value outputs that a constant com-
mand value is active (e.g. after bus/mains voltage return or a forced position and
emergency operation or manual operation). In this case, this constant command
value is also included in the calculation of the largest command value until the
named functions with a higher priority are exited or a new command value tele-
gram is received via the bus, overriding the constant command value at the valve
output.

SpaceLogic KNX Valve Drive Controller Channel-independent parameters
61 | MTN6730-0002 11.08.2020
Transmission of the largest command
value
only on change
only cyclical
on change and cyclical
The largest command value determined by the heating actuator is actively trans-
mitted to the bus. This parameter decides when a telegram is transmitted via the
"Largest command value" object.
This parameter is visible only if the "Largest command value" function is enabled.
Only on change: A telegram is only transmitted when the largest command value
changes.
Only cyclical: The actuator only transmits the "Largest command value" telegram
cyclically. The cycle time is defined globally for all feedback on the parameter
page "General".
On change and cyclical: The actuator transmits the "Largest command value"
when the object value changes and also cyclically.
Transmit on change by 0.3 %, 0.5 %, 1...3...20 %
Here, the change interval of the largest command value for automatic transmis-
sion is defined. The actuator only transmits a new telegram value when the largest
command value has changed by the interval preset here since the last transmis-
sion operation.
This parameter is visible only if the "Largest command value" function is enabled.
Record external largest command
value ?
no
yes
The actuator is able to evaluate an external largest control value (e.g. from an-
other heating actuator). The local heating actuator monitors the external telegram
with its own active constant command values and outputs the largest of all com-
mand values via the object "Largest control value".
This parameter will enable the object "External largest command value" in the
"yes" setting. It is only available when the "Largest command value" function is en-
abled.
Activate "Pump control" function ? no
yes
The heating actuator allows switching activation of the circulation pump of a heat-
ing or cooling circuit via a 1-bit KNX telegram.
Here, the pump control of the actuator can be enabled centrally ("yes" setting).
The valve outputs must be assigned to the pump control individually on the para-
meter pages "Ax - Assignments", so that they are included in the control.
Polarity of "Pump control" object 0 = Switch off pump /
1 = Switch on pump
0 = Switch on pump/
1 = Switch off pump
This parameter defines the telegram polarity of the "Pump control" object. It is vis-
ible only if the pump control is enabled.
Record external pump control ? no
yes
The actuator is able to evaluate an external pump control signal (e.g. from another
heating actuator). The local heating actuator links the external telegram with the
internal status of the pump logically as OR and outputs the result of this link via
the object "Switch pump".
This parameter will enable the object "External pump control" in the "Yes" setting.
It is visible only if the pump control is enabled.

SpaceLogic KNX Valve Drive Controller Channel-independent parameters
62 | MTN6730-0002 11.08.2020
Limiting value minimum command value
for pump (0...100 %)
0...100
The actuator only switches the pump on when at least one command value of the
assigned outputs exceeds the defined limiting value plus the hysteresis defined
here (see next parameter). The pump is switched off when the limiting value is
reached or undershot again.
This parameter is visible only if the pump control is enabled.
Hysteresis for limiting value minimum
command value (1...20 %)
1...20
This parameter specifies the hysteresis of the limiting value of the minimum com-
mand value of the pump control. The actuator only switches the pump on when a
command value exceeds the defined limiting value plus the hysteresis defined
here.
This parameter is visible only if the pump control is enabled.
Delay pump ACTIVE Minutes (0...59) 0...59
The actuator only outputs the ON telegram to the pump after determination when
the delay time defined here has elapsed. The pump is not switched on when the
actuator determines within the preset time that the pump must remain switched
off, due to a limiting value plus hysteresis again being undershot. This parameter
is visible only if the pump control is enabled.
Definition of the delay time minutes.
Seconds (0...59) 0...10...59
Definition of the delay time seconds.
Delay pump INACTIVE Hours (0...23) 0...23
The actuator only outputs the OFF telegram to the pump after determination when
the delay time defined here has elapsed. The pump is not switched on when the
actuator determines within the preset time that the pump must remain switched
off, due to a limiting value again being exceeded. This parameter is visible only if
the pump control is enabled.
Definition of the delay time hours.
Minutes (0...59) 0...10...59
Definition of the delay time minutes.
Seconds (0...59) 0...59
Definition of the delay time seconds.
Activate anti-sticking protection no
yes
If pump control is enabled, optional cyclical anti-sticking protection can prevent the
sticking of the pump, if it has not been switched on by the command value evalu-
ation for a longer period of time. In the "Yes" setting, this parameter enables cyc-
lical anti-sticking protection.
Time for cyclical switching on of the
pump (1...26 weeks)
1...26
When anti-sticking protection is enabled, the length of protection function is
defined here. If the pump is not switched on at least once during the set time by
the pump controller, then the actuator will executed anti-sticking protection, if ne-
cessary on a regular basis.

SpaceLogic KNX Valve Drive Controller Channel-independent parameters
63 | MTN6730-0002 11.08.2020
Switch-on time of the pump (1...15
minutes)
1...5...15
When anti-sticking protection is enabled, the length of pump running for the cyc-
lical protection function must be preset here. The actuator then switches the pump
on for the set time without interruption, assuming that anti-sticking protection must
be executed.
Manual control in case of bus voltage
failure
disabled
enabled
This parameter can be used for programming whether manual operation is to be
possible or deactivated in case of bus voltage failure (bus voltage switched off).
Manual control during bus operation disabled
enabled
This parameter can be used for programming whether manual operation is to be
possible or deactivated during bus operation (bus voltage on).
Disabling function ? Yes
No
Manual control can be disabled via the bus, even if it is already active. For this
purpose, the disabling object can be enabled here.
This parameter is only visible if manual control is enabled during bus operation.
Polarity of disable object 0 = enabled;
1 = disabled
0 = disabled;
1 = enabled
This parameter sets the polarity of the disabling object.
This parameter is only visible if manual control is enabled during bus operation.
Transmit status ? yes
no
The current state of manual control can be transmitted to the bus via a separate
status object, if bus voltage is available (setting: "Yes").
This parameter is only visible if manual control is enabled during bus operation.
Status object function and polarity 0 = inactive;
1 = man.contr.active
0 = inactive;
1 = perman. man. control active
This parameter defines the information contained in the status object. The object
is always "0", when the manual control mode is deactivated.
This parameter is only visible if manual control is enabled during bus operation.
0 = inactive;
1 = man. contr. active: The object is "1" when the manual control mode is active
(temporary or permanent).
0 = inactive;
1 = perm. man. contr. active: The object is only "1" when the permanent manual
control is active.
SpaceLogic KNX Valve Drive Controller Channel-independent parameters
64 | MTN6730-0002 11.08.2020
Behaviour at the end of permanent
manual control during bus operation
no change
Output tracking
The behaviour of the actuator at the end of permanent manual control depends on
this parameter.
This parameter is only visible if manual control is enabled during bus operation.
No change: After the end of the permanent manual operation, the current state of
all valve outputs remains unchanged. If, however, a function with a priority lower
than that of manual operation (e.g. forced position, service mode) has been activ-
ated via the bus before or during manual operation, the actuator sets the reaction
preset for this function for the appropriate outputs.
Track outputs: During active permanent manual operation, all incoming telegrams
and state changes are tracked internally. At the end of the manual operation, the
valve outputs are set according to the most recently received command or the
most recently activated function with a lower priority.
Response of the manual operation to
bus voltage return
Exit manual operation
Do not exit manual operation
This parameter defines whether an active short-time or permanent manual opera-
tion can be terminated, should the bus voltage fail, or not.
The following always applies: If the mains voltage supply is not switched on,
manual operation is possible is bus voltage is available (valve output can only be
activated if a valve power supply is available). If, in this case, the bus voltage is
switched off, the actuator also always exits manual operation, as there is no power
supply to the device electronics. After the bus voltage return (mains power supply
switched off), manual operation is always deactivated.
This parameter is only visible if manual control is enabled during bus operation.
Exit manual control: After the bus voltage return through a mains power supply be-
ing available, active manual operation is exited. For example, this means that it is
possible to deactivate manual operation through a simultaneous bus reset on mul-
tiple actuators with the same parameter setting.
No exit of manual control: After the bus voltage return through a mains power sup-
ply being available, active manual operation is exited.
Disable bus control of individual outputs
during bus operation
yes
no
Individual valve outputs can be disabled locally during permanent manual opera-
tion, so that the disabled outputs can no longer be activated using input command
value telegrams or lower-priority device functions. Disabling via manual operation
is only permitted if this parameter is set to "Yes".
This parameter is only visible if manual control is enabled during bus operation.
SpaceLogic KNX Valve Drive Controller Objects for device functions
65 | MTN6730-0002 11.08.2020
Cycle time during manual operation 0.5 minutes
1 minute
1.5 minutes
2 minutes
...
19.5 minutes
20 minutes (recommended)
During manual operation, all the valve outputs are activated with a pulse-width
modulation (PWM) using the OPEN button, irrespective of the configured com-
mand value data format (1-bit or 1-byte). The cycle time of the PWM signal for a
valve output activated by manual operation is configured by this parameter. In
consequence, a manual operation locally on the device can allow the use of a dif-
ferent cycle time than in normal operation of the actuator (activation via KNX tele-
grams).
The CLOSE command always closes the valves completely (0 %).
An exception is the central operating function of all valve outputs with the ALL
OP / CL button. Here, the actuator always activates the valve outputs with a con-
stant signal (0 % or 100 %).
PWM in manual control (5...100 %) 5...50...100
This parameter specifies the pulse-pause ratio of the pulse width modulation of
the manual operation for opened valve outputs.
9.12 Objects for device functions
Function: Monitoring of the operating voltage
Object no. Function Name Type DPT Flag
1 Failure of operating
voltage
Valve outputs - out-
put
1-bit 1,005 C, R, -,T, -
1-bit output object to signal a failure of the operating voltage (AC 24 V or
AC 230 V) of the valve outputs. The telegram polarity can be configured.
Function: Pump control
Object no. Function Name Type DPT Flag
2 Switch pump Pump - output 1-bit 1,001 C, R, -,T, -
1-bit output object for direct activation of a circulation pump of the heating or cool-
ing system. The pump is only switched on by the actuator when at least one com-
mand value of the assigned outputs exceeds a limiting value with hysteresis
defined in the ETS. The pump is switched off when the limiting value is reached or
undershot again. In addition, the actuator can optionally evaluate an external tele-
gram (object 3).
The telegram polarity can be configured. After bus voltage return and an ETS pro-
gramming operation, the actuator always first transmits the status "Pump OFF"
without a delay. The actuator then updates the status to "Pump ON", providing
that the condition for this has been fulfilled and an optionally configured "Pump
delay ACTIVE" has elapsed.
Function: Pump control
SpaceLogic KNX Valve Drive Controller Objects for device functions
66 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
3 External pump con-
trol
Pump - input 1-bit 1,001 C, (R), W,
-, -
1-bit input object for the cascading of multiple actuators with pump control. The
transmitting operation for the pump control of another heating actuator can be
connected to this object. The local heating actuator links the external telegram
with the internal status of the pump logically as OR and outputs the result of this
link via the object 2.
In this case, the telegram polarity is fixed: "0" = Pump OFF, "1" = Pump ON.
Cyclical telegrams to this object with an identical telegram polarity (ON -> ON,
OFF -> OFF) produce no reaction. After a device reset, there is no polling of the
current status of this object. Only when a bus telegram is received does the actu-
ator take this status into account when activating the pump.
Function: Evaluation of the largest command value
Object no. Function Name Type DPT Flag
4 Largest command
value
Valve outputs - out-
put
1 bytes 5,001 C, R, -,T, -
1-byte output object for transmission of the largest constant command value of the
heating actuator to another bus device (e.g. suitable calorific furnaces with integ-
rated KNX controller or visualisation). The heating actuator evaluates all the active
1-byte command values of the valve outputs and, optionally, the externally re-
ceived largest command value (object 5) and transmits the largest command
value via this object.
In the case of valve outputs configured in the ETS to the command value data
formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting
value", there is no evaluation of the command values preset via the bus. Excep-
tion: It may also occur with such command value outputs that a constant com-
mand value is active (e.g. after bus/mains voltage return or a forced position and
emergency operation or manual operation). In this case, this constant command
value is also included in the calculation of the largest command value until the
named functions with a higher priority are exited or a new command value tele-
gram is received via the bus, overriding the constant command value at the valve
output.
After bus voltage return and an ETS programming operation, the actuator trans-
mits the current value of the largest command value without a delay, providing that
automatic transmission on change is configured. After a full device reset, the actu-
ator does not transmit automatically, when all the command values are set to 0 %.
After a device reset, the actuator immediately starts the time for cyclical transmis-
sion (if configured), so that the object value effective after the reset is transmitted
cyclically.
Function: Evaluation of the largest command value
Object no. Function Name Type DPT Flag
5 External largest
command value
Valve outputs - in-
put
1 bytes 5,001 C, (R), W,
-, -
1-bit input object for the cascading of multiple actuators with evaluation of the
largest constant command value. The transmitting object of a largest command
value of another heating actuator can be connected to this object. The local heat-
ing actuator monitors the external telegram with its own active constant command
values and outputs the largest of all command values via object 4.
Cyclical telegrams to this object with the same value cause no reaction. After a
device reset, there is no polling of the current status of this object. Only when a
bus telegram is received does the actuator take this status into account during
evaluation.

SpaceLogic KNX Valve Drive Controller Objects for device functions
67 | MTN6730-0002 11.08.2020
Function heat requirement signal
Object no. Function Name Type DPT Flag
6 Heat requirement Valve outputs - out-
put
1-bit 1,002 C, R, -,T, -
1-bit output object for the transmission of general heat requirement information to
suitable burner and boiler controllers. A heat requirement is only signalled by the
actuator when at least one command variable of the assigned outputs exceeds a
limiting value with hysteresis defined in the ETS. A heat requirement signal is re-
tracted when the limiting value is reached or undershot again. In addition, the ac-
tuator can optionally evaluate an external telegram (object 7).
The telegram polarity can be configured. After bus voltage return and an ETS pro-
gramming operation, the actuator always first transmits the status "No heat re-
quirement" without a delay. The actuator then updates the status to "Heat require-
ment", providing that the condition for this has been fulfilled and an optionally con-
figured "Heat requirement ACTIVE" has elapsed.
Function heat requirement signal
Object no. Function Name Type DPT Flag
7 External heat re-
quirement
Valve outputs - in-
put
1-bit 1,002 C, (R), W,
-, -
1-bit input object for the cascading of multiple actuators with a heat requirement
signal. The transmitting object of a heat requirement signal of another heating ac-
tuator can be connected to this object. The local heating actuator links the external
telegram with the internal status of its own heat requirement logically as OR and
outputs the result of this link via the object 6.
In this case, the telegram polarity is fixed: "0" = Heat requirement INACTIVE, "1" =
Heat requirement ACTIVE.
Cyclical telegrams to this object with an identical telegram polarity (ON -> ON,
OFF -> OFF) produce no reaction. After a device reset, there is no polling of the
current status of this object. Only when a bus telegram is received does the actu-
ator take this status into account during evaluation of the heat requirement.
Function toggling of the Summer / Winter operating mode
Object no. Function Name Type DPT Flag
8 Summer / winter
change-over
Operating mode -
input
1-bit 1,002 C, (R), W,
-, -
1-bit input object to switch over between summer and winter mode. The telegram
polarity can be configured. The status is stored internally in the device if there is a
bus or mains voltage failure and is restored after a device reset.
Cyclical telegrams to this object with an identical telegram polarity (ON -> ON,
OFF -> OFF) produce no reaction.
Function short-circuit / overload signal
Object no. Function Name Type DPT Flag
9 Reset short-circuit /
overload
Valve outputs - in-
put
1-bit 1,015 C, (R), W,
-, -
1-bit input object for central reset of all short-circuit/overload signals of the valve
outputs. In this case, the telegram polarity is fixed: "0" = No reaction, "1" = Reset
all signals.
Individual short-circuit / overload signals can only be reset via the object when the
testing cycle (waiting time and testing cycle time) of the affected valve outputs has
been completed.
Function: Collective feedback status
SpaceLogic KNX Valve Drive Controller Objects for device functions
68 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
10 Collective feedback
status
Valve outputs - out-
put
4 bytes 27,001 C, (R), -,
(T), -
4-byte output object for collective status feedback of all valve outputs. The collect-
ive feedback summarises the valve states in just one telegram. The object con-
tains bit-orientated feedback information. The object can be actively transmitting
or passively read out (parameter-dependent).
Function: Activate / deactivate service mode
Object no. Function Name Type DPT Flag
12 Activate / deactiv-
ate
Service mode - in-
put
2-bit 2,001 C, (R), W,
-, -
2-bit input object for activating and deactivating service mode. With the value "1",
bit 1 of the telegram activates service mode. The assigned valve outputs are then
locked in the status preset by bit 0 ("0" = Closed / "1" = Opened). The configured
valve direction of action is taken into account. The value "0" in bit 1 deactivates
service mode again.
0x = Service mode deactivated
10 = Service mode activated, valves closed
11 = Service mode activated, valves opened
Function: Service mode status
Object no. Function Name Type DPT Flag
13 Status active / in-
active
Service mode - out-
put
1-bit 1,002 C, R, -,T, -
1-bit output object for status signalling of whether the service mode is active or
not. In this case, the telegram polarity is fixed: "0" = Service mode inactive,
"1" = Service mode active.
The object value is not transmitted automatically after a device reset (ETS pro-
gramming operation, bus/mains voltage return).
Function: Manual operation
Object no. Function Name Type DPT Flag
14 Disabling Manual operation -
Input
1-bit 1,003 C, (R), W,
-, -
1-bit input object for disabling the buttons for manual operation on the device. The
polarity can be configured.
Function: Manual operation
Object no. Function Name Type DPT Flag
15 Status Manual operation -
Output
1-bit 1,002 C, R, -,T, -
1-bit output object for manual operation status transmission. The object is "0",
when manual control is deactivated (bus control). The object is "1", when manual
operation is active. You can configure whether the temporary or the permanent
manual operation will be indicated as status information or not.
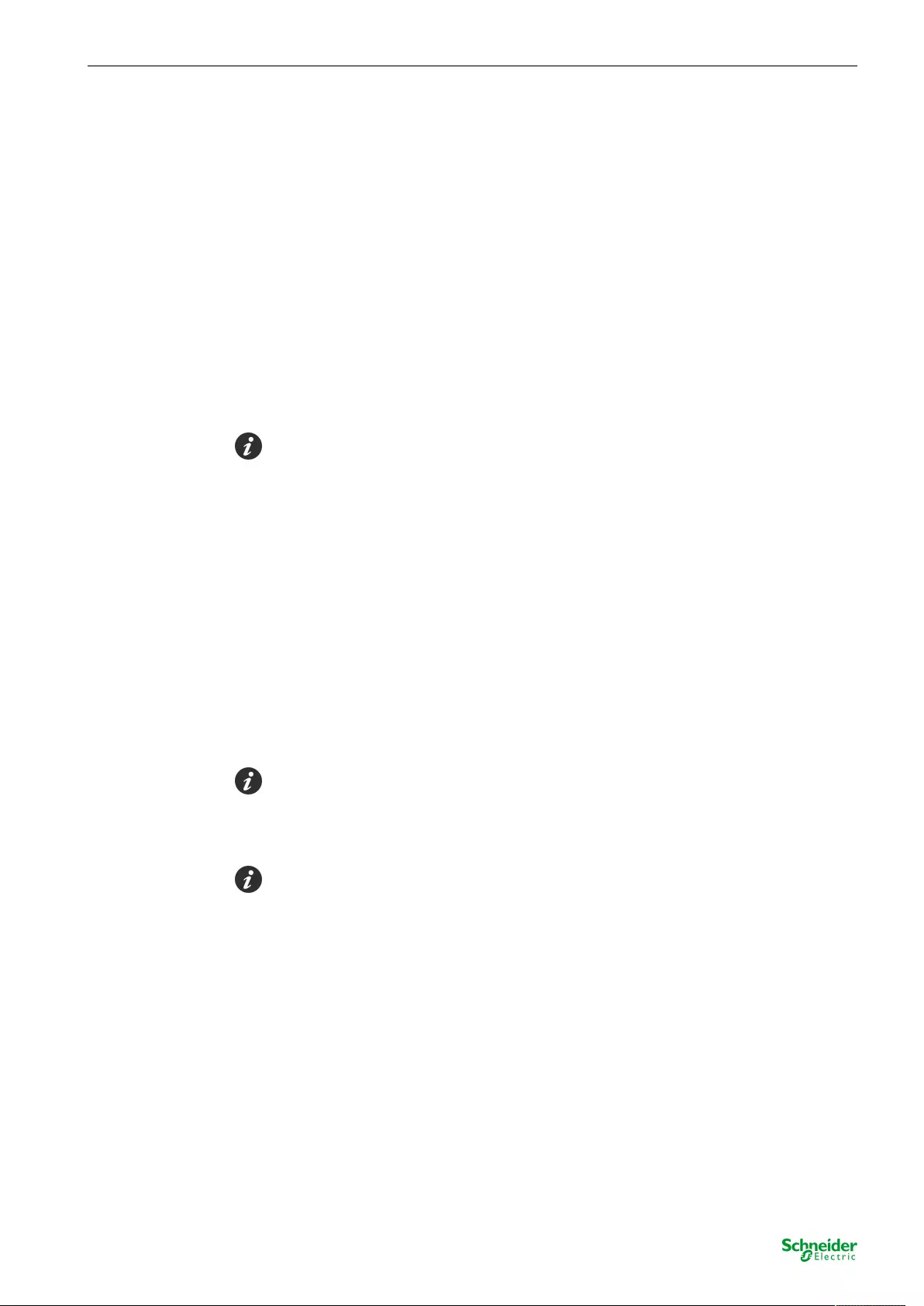
SpaceLogic KNX Valve Drive Controller Valve direction of action
69 | MTN6730-0002 11.08.2020
10 Channel-orientated
functional description for
valve outputs
10.1 Valve direction of action
The heating actuator possesses 6 electronic outputs, each of which can silently ac-
tivate up to 4 (AC 230 V) or 2 (AC 24 V) actuators. Both deenergised closed and
deenergised opened actuators can be connected. The parameter "Valve in voltage-
free state (valve direction of action)" on the parameter pages "Ax - General" spe-
cifies which device type is connected to a valve output.
Only actuators with the same characteristics may be connected to each valve out-
put (deenergised closed/opened). The drive type must match the configuration.
The configured valve direction of action is taken into account in each valve activa-
tion. With 1-byte command values and deenergised closed valves, the switch-on
time is derived directly from the configured PWM and the cycle time.
Example: PWM = 30 %, cycle time = 10 minutes -> Switch-on time = 3 minutes,
switch-off time = 7 minutes.
In the case of 1-byte command values and deenergised opened valves, the switch-
on time is inverted. Example: PWM = 30 %, cycle time = 10 minutes -> Switch-on
time = 7 minutes, switch-off time = 3 minutes.
On deenergised closed valve drives, command values are not inverted, in accord-
ance with the 1-bit data format. Example: Command value ON -> Output switched
on, Command value OFF -> Output switched off.
By contrast, switching command values are inverted for deenergised opened valve
drives. Example: Command value ON -> Output switched off, Command value
OFF -> Output switched on.
On the LED status display, the valve direction of action configured for each output
in the ETS is not taken into account. As a result, the LEDs do not immediately dis-
play the valve state (opened / closed). Inversion of the status display according to
the valve direction of action thus does not take place.
In the state as supplied, the valve direction of action for all the valve outputs is set
to "Deenergised closed".
10.2 Reset behaviour
The states of the valve outputs after a bus voltage failure, bus or mains voltage re-
turn or after an ETS programming operation can be set separately.
Setting the behaviour in case of bus voltage failure
The parameter "Behaviour in case of bus voltage failure" is available separately for
each valve output on the parameter page "Ax - General". The actuator executes
the behaviour configured in the ETS when the bus voltage fails but the mains
voltage supply is still available without interruption. If the bus and mains voltage
supply fails simultaneously, then the valve outputs will not display the configured
behaviour. In this case, even if valve voltage is available, the outputs will always
switch off, as the device electronics are no longer being supplied with energy and,

SpaceLogic KNX Valve Drive Controller Reset behaviour
70 | MTN6730-0002 11.08.2020
as a result, the actuator is unable to function. In this state of operation, deener-
gised closed valve drives close completely and deenergised opened valve drives
open. The configured valve direction of action can no longer be evaluated if the
bus and mains voltage fail.
If only the mains voltage supply fails but the bus and valve voltage remain, then the
actuator will not show a reaction.
■ Set the parameter to "No change".
A bus voltage failure and mains voltage supply does not produce a reaction
from the valve output. The command value active before the bus voltage
failure remains unchanged, provided that the valve voltage supply is still
switched on.
■ Set the parameter to "Preset command value".
The actuator sets the command value preset for the valve output by the
parameter "Command value on bus voltage failure". For valve outputs con-
figured in the ETS to the command value data formats "Switching (1-bit)" or
"Constant (1-byte) with command value limiting value", a constant command
value can also be preset using the parameter "Command value on bus
voltage failure". In this case, a pulse width modulation (5 % ... 95 %) is ex-
ecuted for the affected command value outputs. In the "0 %" and "100 %"
presettings, the valve outputs are activated continuously. The preset PWM
remains active until other functions (manual operation, short-circuit/over-
load) have been executed, which may override the constant command
value on the valve output.
■ Set the parameter to "Activate command value as for forced position".
For the valve output, the actuator polls the command value preset for the
forced position, as configured in the ETS. Here, the active operating mode
(summer / winter) is taken into account, providing that a summer / winter
change-over is configured. Ensure that, in this setting, the forced position
function is not executed! The actuator only polls the command value preset
for the forced position.
■ Set the parameter to "Activate command value as for emergency operation".
For the valve output, the actuator polls the emergency operation command
value, as configured in the ETS. Here, the active operating mode (summer /
winter) is taken into account, providing that a summer / winter change-over
is configured. Ensure that, in this setting, emergency operation is not ex-
ecuted (as would be the case if there was a faulty command value found in
the course of command value monitoring)! The actuator only polls the com-
mand value preset for emergency operation.
If there is a bus voltage failure, the actuator saves the active command value in-
ternally in the device, so that the command value can be restored when the device
power supply returns (configurable). Saving only takes place after a previous
device reset (ETS programming operation, bus voltage return) when the reset is
longer than 30 seconds previously. Otherwise the actuator does not save the cur-
rent command value! In that case, an old value remains valid, as was previously
saved by the actuator on the bus voltage failure. If only the mains power supply
fails, the actuator does not save the command value.
If the bus voltage fails while a manual operation on the device is activated, the
parameter "Behaviour in case of bus voltage failure" is not executed.

SpaceLogic KNX Valve Drive Controller Reset behaviour
71 | MTN6730-0002 11.08.2020
Behaviour after bus or mains voltage return
presetting
The parameter "Behaviour after bus or mains voltage return" is available separately
for each valve output on the parameter page "Ax - General".
■ Set the parameter to "Preset command value".
The actuator sets the command value preset for the valve output by the
parameter "Command value after bus or mains voltage return". For valve
outputs configured in the ETS to the command value data formats "Switch-
ing (1-bit)" or "Constant (1-byte) with command value limiting value", a con-
stant command value can also be preset using the parameter "Command
value after bus or mains voltage return". In this case, a pulse width modula-
tion (5 % ... 95 %) is executed for the affected command value outputs. In
the "0 %" and "100 %" presettings, the valve outputs are activated continu-
ously. The preset PWM remains active until other functions have been ex-
ecuted or a new command value telegram is received via the bus, overrid-
ing the constant command value on the valve output.
■ Set the parameter to "Activate command value as for forced position".
For the valve output, the actuator polls the command value preset for the
forced position, as configured in the ETS. Here, the active operating mode
(summer / winter) is taken into account, providing that a summer / winter
change-over is configured. Ensure that, in this setting, the forced position
function is not executed! The actuator only polls the command value preset
for the forced position.
■ Set the parameter to "Activate command value as for emergency operation".
For the valve output, the actuator polls the emergency operation command
value, as configured in the ETS. Here, the active operating mode (summer /
winter) is taken into account, providing that a summer / winter change-over
is configured. Ensure that, in this setting, emergency operation is not ex-
ecuted (as would be the case if there was a faulty command value found in
the course of command value monitoring)! The actuator only polls the com-
mand value preset for emergency operation.
■ Set the parameter to "Command value as before bus voltage failure".
After bus or mains voltage return, that command value is set at the valve
output which was active at the moment of the last bus voltage failure. If
there is a bus voltage failure, the actuator saves the active command value
internally in the device, so that the command value can be restored when
the device power supply returns. Saving only takes place after a previous
device reset (ETS programming operation, bus voltage return) when the re-
set is longer than 30 seconds previously. Otherwise the actuator does not
save the current command value! In that case, an old value remains valid,
as was previously saved by the actuator on the bus voltage failure. If only
the mains power supply fails, the actuator does not save the command
value.
A valve state set after bus/mains voltage return is added to the command value
status objects. Actively transmitting feedback objects also only transmit after bus/
mains voltage return, when the initialisation has finished, and if necessary the
"Delay time after bus voltage return" has elapsed.
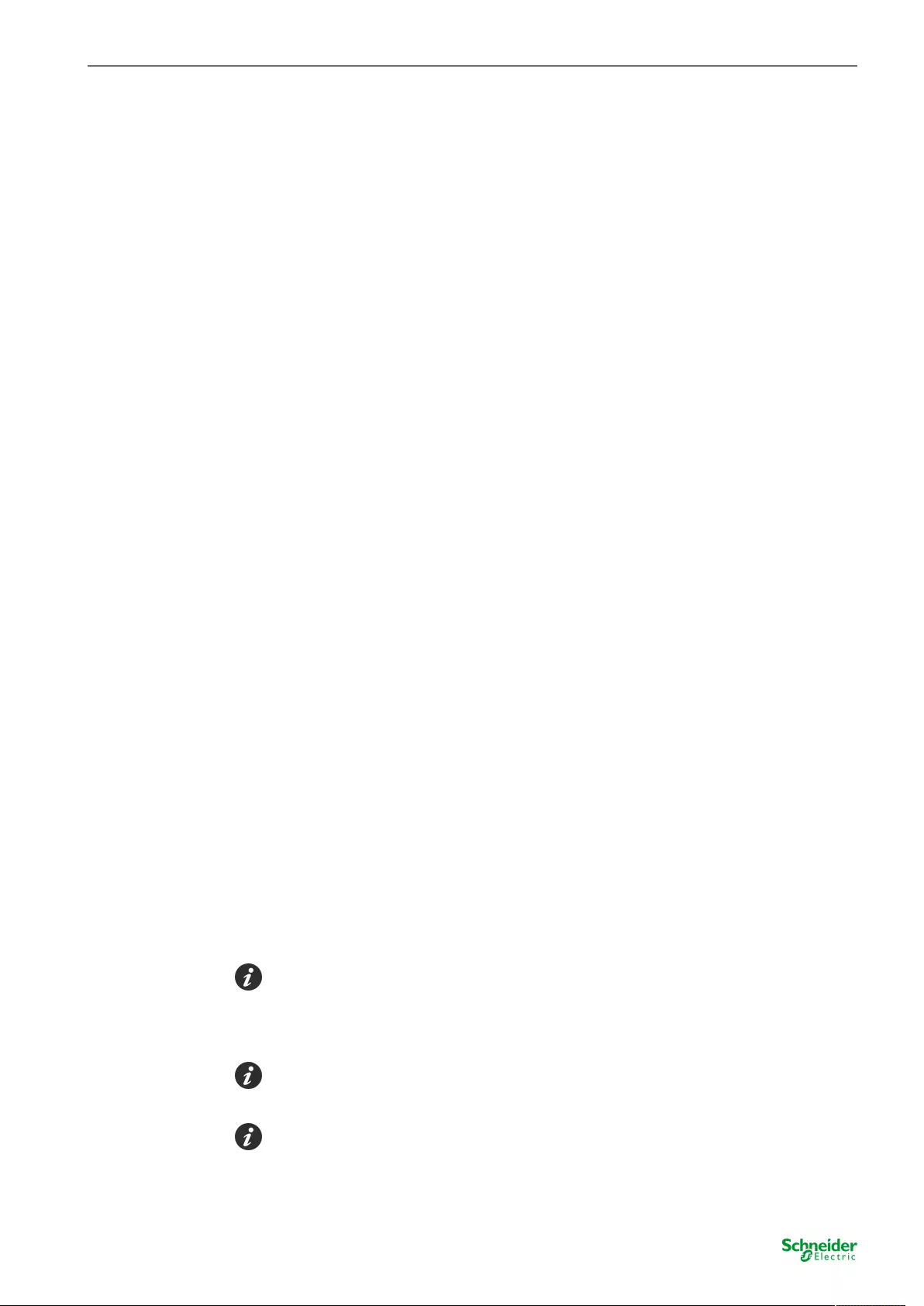
SpaceLogic KNX Valve Drive Controller Reset behaviour
72 | MTN6730-0002 11.08.2020
Presetting the behaviour after ETS programming
The parameter "Behaviour after ETS programming" is available separately for each
valve output on the parameter page "Ax - General". This parameter can be used to
configure the behaviour of an output, irrespective of the behaviour after a bus/
mains voltage return.
■ Set the parameter to "Behaviour as after bus voltage return".
After an ETS programming operation, the valve output will behaviour in the
manner defined in the parameter "Behaviour after bus or mains voltage re-
turn". If the behaviour there is configured to "Command value as before bus
voltage failure", then that command value is also set after an ETS program-
ming operation which was active at the time of the last bus voltage failure.
An ETS programming operation does not overwrite the saved command
value.
■ Set the parameter to "Preset command value".
The actuator sets the command value preset for the valve output by the
parameter "Command value after ETS programming operation". For valve
outputs configured in the ETS to the command value data formats "Switch-
ing (1-bit)" or "Constant (1-byte) with command value limiting value", a con-
stant command value can also be preset using the parameter "Command
value after ETS programming operation". In this case, a pulse width modu-
lation (5 % ... 95 %) is executed for the affected command value outputs. In
the "0 %" and "100 %" presettings, the valve outputs are activated continu-
ously. The preset PWM remains active until other functions have been ex-
ecuted or a new command value telegram is received via the bus, overrid-
ing the constant command value on the valve output.
■ Set the parameter to "Activate command value as for forced position".
For the valve output, the actuator polls the command value preset for the
forced position, as configured in the ETS. Here, the active operating mode
(summer / winter) is taken into account, providing that a summer / winter
change-over is configured. Ensure that, in this setting, the forced position
function is not executed! The actuator only polls the command value preset
for the forced position.
■ Set the parameter to "Activate command value as for emergency operation".
For the valve output, the actuator polls the emergency operation command
value, as configured in the ETS. Here, the active operating mode (summer /
winter) is taken into account, providing that a summer / winter change-over
is configured. Ensure that, in this setting, emergency operation is not ex-
ecuted (as would be the case if there was a faulty command value found in
the course of command value monitoring)! The actuator only polls the com-
mand value preset for emergency operation.
The behaviour after an ETS programming operation is only executed if there have
been changes in the configuration of the device. If just an application download is
executed with a project design already located in the actuator, then the actuator will
execute the configured "Behaviour after bus or mains voltage return".
An ETS programming operation can also be performed without mains voltage. The
mains voltage supply is not required for an ETS download.
A valve state set after an ETS programming operation is added to the command
value status objects. Actively transmitting feedback objects also only first transmit
after an ETS programming cycle when the initialisation has finished and, if neces-
sary, the "delay time after bus voltage return" has elapsed.
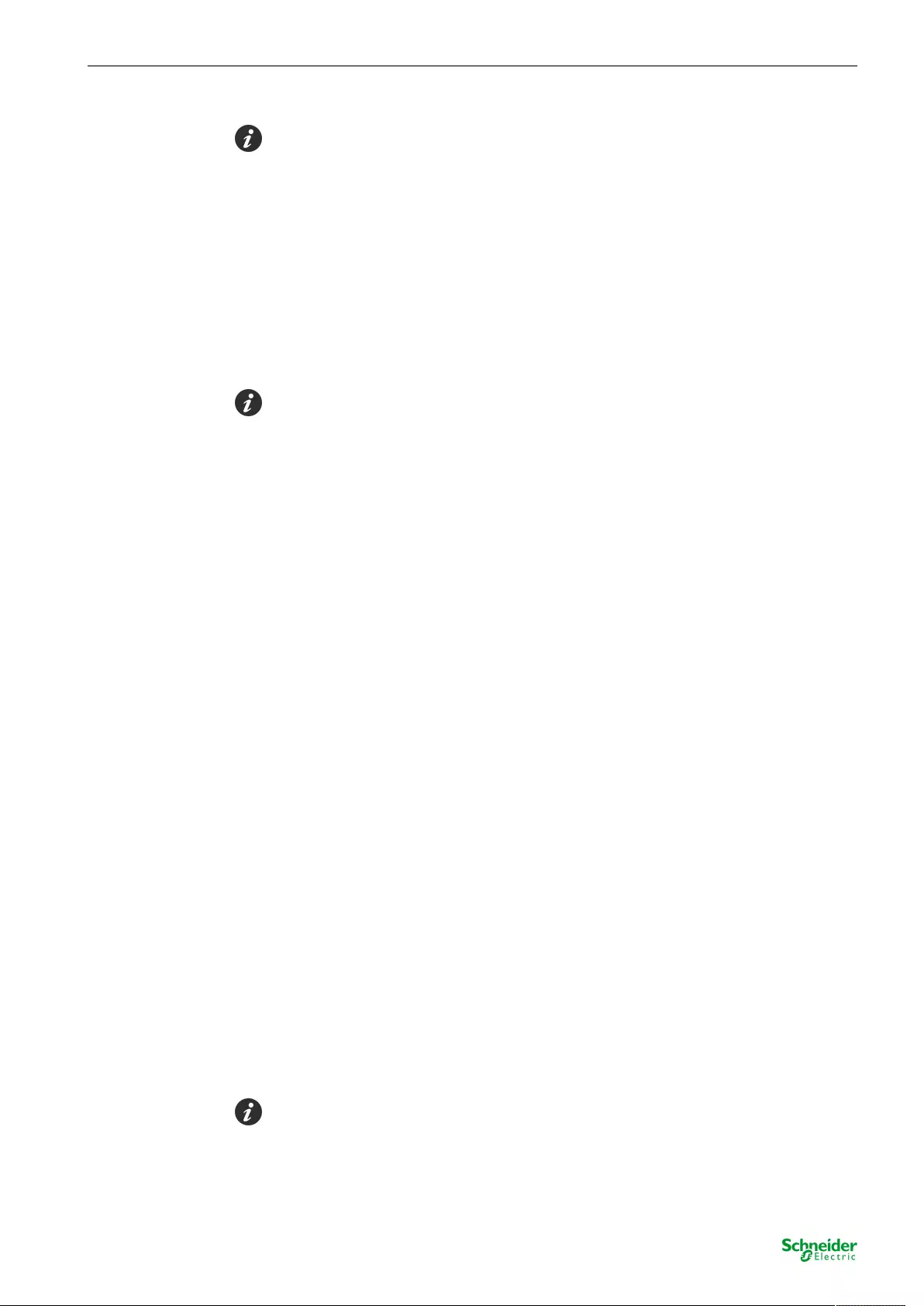
SpaceLogic KNX Valve Drive Controller Data formats for command values
73 | MTN6730-0002 11.08.2020
An active manual mode will be terminated by an ETS programming operation.
10.3 Data formats for command values
The heating actuator receives 1-bit or 1-byte command value telegrams, transmit-
ted, for example, by KNX room temperature controllers. Usually, the room temper-
ature controller determines the room temperature and generates the command
value telegrams using a control algorithm. The actuator controls its valve outputs
either in switching form or with a PWM signal, according to the data format of the
command values and the configuration in the ETS. The cycle time for constant
PWM output signals can be configured separately for each valve output of the
heating actuator. This allows individual adaptation to different actuator types.
It should be noted that the heating actuator does not carry out temperature control
itself. The actuator converts received command value telegrams or command value
presettings from device functions into constant or switching output signals.
The "Data format of the command value input" parameter, which is available separ-
ately for each valve output on the parameter pages "Ax - Command values/Status/
Operating mode", specifies the input format of the command value objects.
Data format of the command value input "Switching
(1-bit)"
In the case of a 1-bit command value, the telegram received via the command
value object is forwarded directly to the appropriate output of the actuator, taking
the configured valve direction of action into account. This means that, if an "ON"
telegram is received, the is valve completely opened. The output is then energised
for energised closed valves and the output is deenergised for energised opened
valve drives. The valve is closed completely when an "OFF" telegram is received.
The valve output is then not energised for deenergised closed valves and ener-
gised for deenergised opened valve drives.
In the functions and events listed below, valve outputs configured to the command
value data formats "Switching (1-bit)" are always activated by a constant command
value with pulse width modulation (PWM), provided that command values not
equal to 0 % or 100 % are to be set...
– Active forced position,
– Active emergency operation,
– On bus voltage failure,
– After bus or mains voltage return,
– After an ETS programming operation,
– During a manual operation.
PWM keeps being executed until the named functions have been exited or, after
the named events, no more lower-level functions are active and a new command
value telegram is received via the bus, overriding the constant command value on
the valve output.
In the named cases, the constant command value is also included in the calculation
of the largest command value and that of the heat requirement and pump control
(optional functions).

SpaceLogic KNX Valve Drive Controller Data formats for command values
74 | MTN6730-0002 11.08.2020
Valve outputs, which receive preset command values via the data format "Switch-
ing (1-bit)", influence the heat requirement and pump control. Here, an "OFF" com-
mand value is interpreted as "0 %" and an "ON" command value as "100 %".
Data format of the command value input "Constant (1-
byte) with pulse width modulation (PWM)"
Command values corresponding to the data format "Constant (1-byte)" are imple-
mented by the actuator with an equivalent pulse-width-modulated switch signal at
the valve outputs. Taking the cycle time settable in the actuator for each output into
account, the average output signal resulting from this modulation is a measure of
the centred valve position of the control valve and thus a reference for the set room
temperature. A shift of the mean value, and thus a change in the heating capacity,
can be obtained by changing the duty factor of the switch-on and switch-off pulses
of the output signal (see figure 10). The duty factor is adapted constantly by the ac-
tuator, depending on the command value received (normal operation) or by active
device functions (e.g. manual operation, forced position, emergency operation).
Image10: Resulting mean value through variable duty factor with pulse width mod-
ulation
In accordance with the configured valve direction of action, the appropriate outputs
are either energised or deenergised, depending on the valve position to be ap-
proached. In so doing, the duty factor is inverted automatically for a deenergised
opened drive. Thus, depending on the valve type used, there is no unintended
mean value shift.
Example: Command value: 60 % ->
– Duty factor, deenergised closed: 60 % ON, 40 % OFF,
– Duty factor, deenergised opened: 40 % ON, 60 % OFF.
Example: Command value: 100 % ->
– Duty factor, deenergised closed: Permanently ON,
– Duty factor, deenergised opened: Permanently OFF.
Often, control circuits are subject to non-constant changes in the setpoint preset-
ting (e.g. frost protection, night operation, etc.) or short-time interference (e.g.
measured value deviations due to brief opening of windows or doors near the
sensor). For the setting of the scanning ratio of the required command value to
take place as quickly and correctly in these cases, even with a longer set cycle
time, without any negative impact on the reaction time of the control section, the

SpaceLogic KNX Valve Drive Controller Data formats for command values
75 | MTN6730-0002 11.08.2020
actuator uses a special method for continuous command value adjustment.
The following cases are taken into account...
– Case 1
Command value change, e.g. from 80 % to 30 %, during the opening phase
of the valve (see figure 11).
Before the reception of the new command value (30 %), the old setpoint (80
%) was active. The new command value is received during the opening
phase of the valve. At this point, the actuator detects that it is still possible
to shorten the opening phase, so that it corresponds to the new command
value (30 %). The cycle time is not affected by this operation.
The new duty factor is set immediately after the reception of the new com-
mand value.
Image11: Example of a command value change 80 % -> 30 % during the opening
phase of the valve
– Case 2
Command value change, e.g. from 80 % to 30 %, during the closing phase
of the valve (see figure 12).
Before the reception of the new command value (30 %), the old setpoint (80
%) was active. The new command value is received during the closing
phase of the valve. At this point, the actuator detects that it is still possible
to extend the closing phase, so that it corresponds to the new command
value (30 %). The cycle time remains unchanged, but the starting time of
the period is shifted automatically.
The new duty factor is set immediately after the reception of the new com-
mand value.
Image12: Example of a command value change 80 % -> 30 % during the closing
phase of the valve
– Case 3
Command value change, e.g. from 80 % to 30 % during the opening phase
of the valve (opening phase too long) (see figure 13).
Before the reception of the new command value (30 %), the old setpoint (80
%) was active. The new command value is received during the opening
phase of the valve. At this point, the actuator detects that it is necessary to
cancel the opening phase immediately and close the valve, so that the duty
factor corresponds to the new command value (30 %). The cycle time re-
mains unchanged, but the starting time of the period is shifted automatically.
The new duty factor is set immediately after the reception of the new com-
mand value.
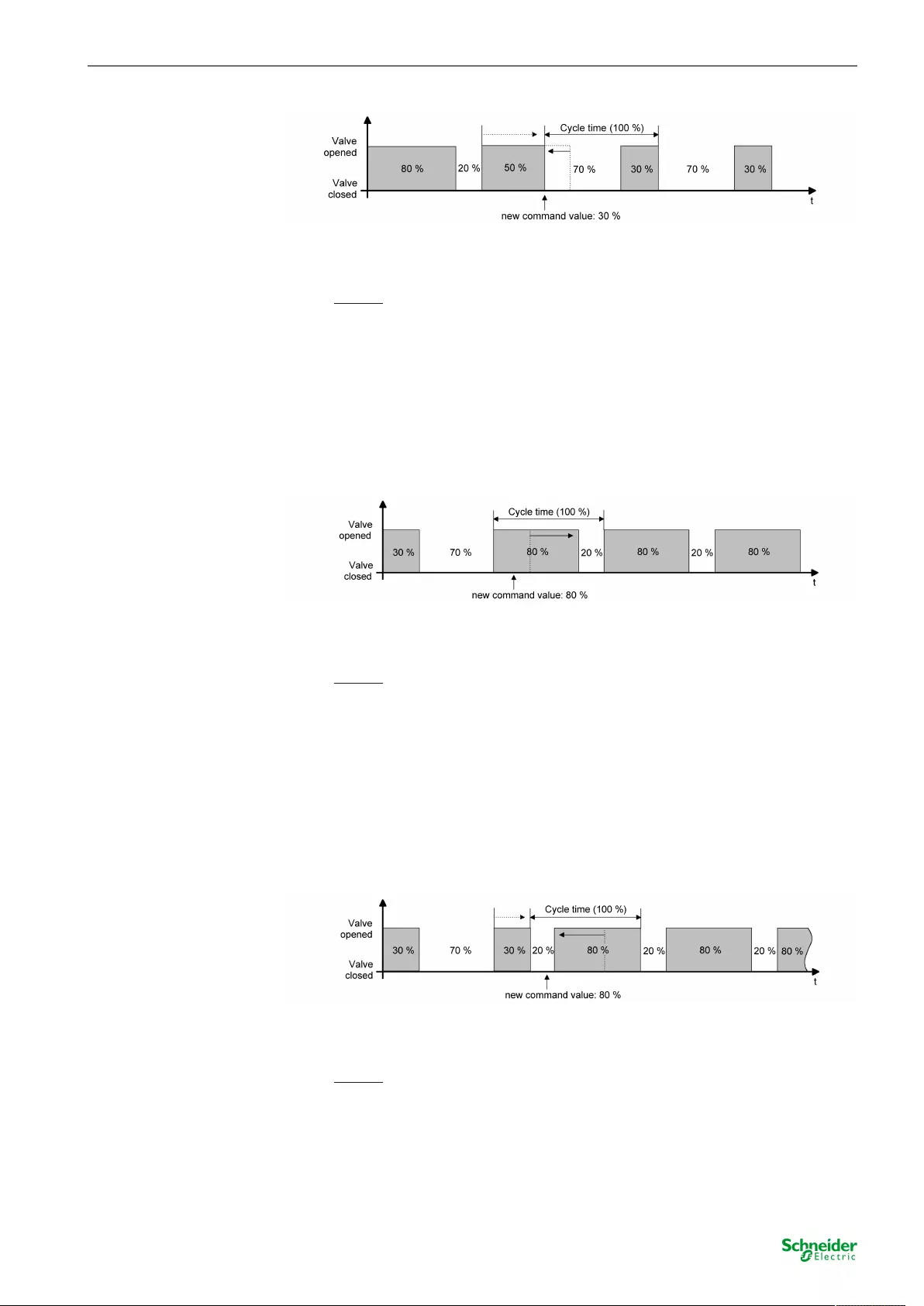
SpaceLogic KNX Valve Drive Controller Data formats for command values
76 | MTN6730-0002 11.08.2020
Image13: Example of a command value change 80 % -> 30 % during the opening
phase of the valve (opening phase too long)
– Case 4
Command value change, e.g. from 30 % to 80 %, during the opening phase
of the valve (see figure 14).
Before the reception of the new command value (80 %), the old setpoint (30
%) was active. The new command value is received during the opening
phase of the valve. At this point, the actuator detects that it is still possible
to extend the open phase, so that it corresponds to the new command value
(80 %). The cycle time is not affected by this operation.
The new duty factor is set immediately after the reception of the new com-
mand value.
Image14: Example of a command value change 30 % -> 80 % during the opening
phase of the valve
– Case 5
Command value change, e.g. from 30 % to 80 %, during the closing phase
of the valve (see figure 15).
Before the reception of the new command value (80 %), the old setpoint (30
%) was active. The new command value is received during the closing
phase of the valve. At this point, the actuator detects that it is still possible
to reduce the closing phase, so that it corresponds to the new command
value (80 %). The cycle time remains unchanged, but the starting time of
the period is shifted automatically.
The new duty factor is set immediately after the reception of the new com-
mand value.
Image15: Example of a command value change 30 % -> 80 % during the closing
phase of the valve
– Case 6
Command value change, e.g. from 30 % to 80 %, during the closing phase
of the valve (closing phase too long) (see figure 16).
Before the reception of the new command value (80 %), the old setpoint (30
%) was active. The new command value is received during the closing
phase of the valve. At this point, the actuator detects that it is necessary to
cancel the closing phase immediately and open the valve, so that the duty
factor corresponds to the new command value (80 %). The cycle time re-
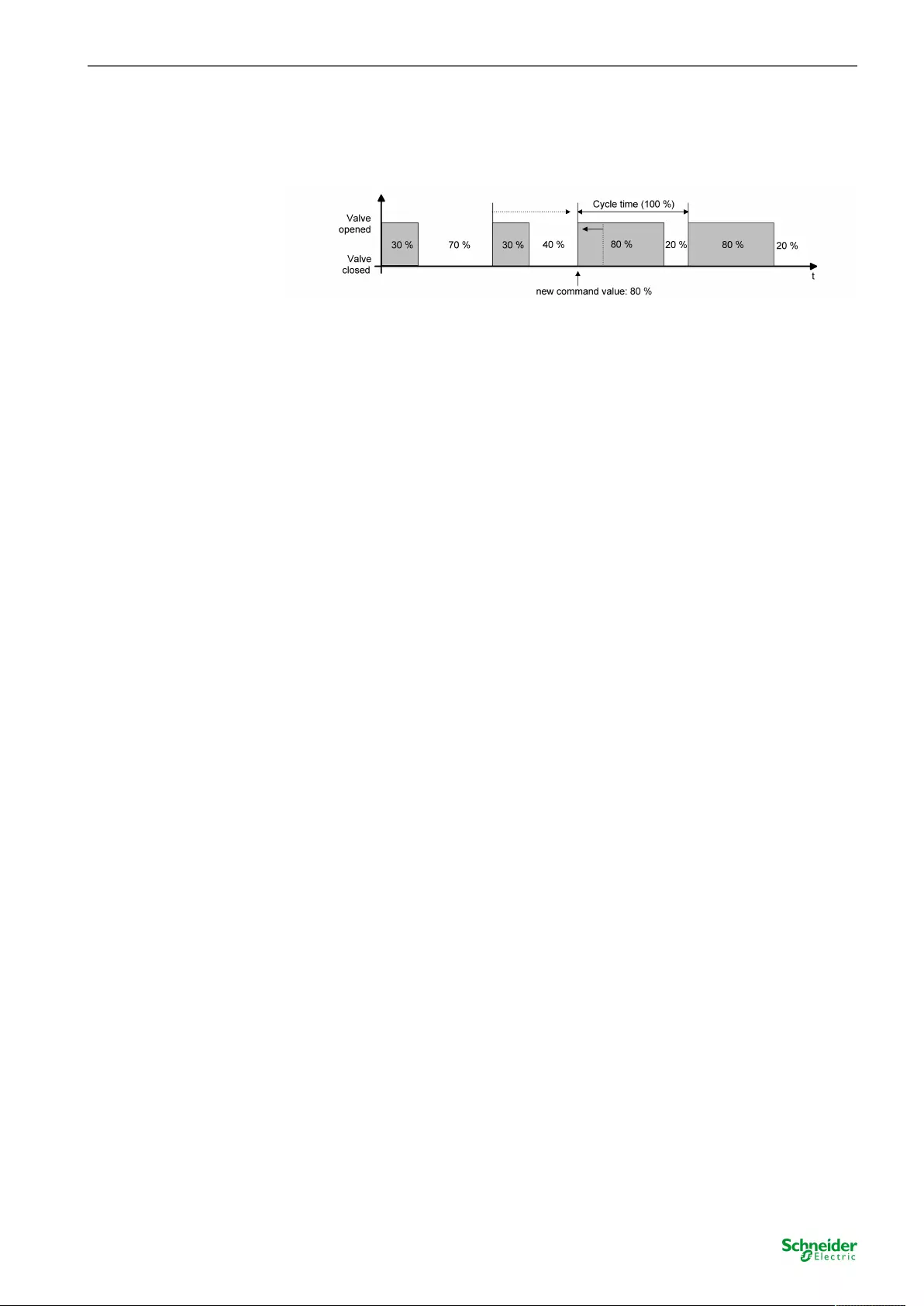
SpaceLogic KNX Valve Drive Controller Data formats for command values
77 | MTN6730-0002 11.08.2020
mains unchanged, but the starting time of the period is shifted automatically.
The new duty factor is set immediately after the reception of the new com-
mand value.
Image16: Example of a command value change 30 % -> 80 % during the opening
phase of the valve (opening phase too long)
Data format of the command value input "Continous
(1-byte) with command value limiting value"
The data format with limiting value evaluation can be used as an alternative to the
conversion of a 1-byte command value into constant pulse width modulation at a
valve output. Here, the received constant command value is converted into a
switching output signal, depending on the configured limiting value. The valve drive
opens when the command value reaches the limiting value or exceeds it
(see figure 17). A hysteresis is also evaluated to prevent constant closing and
opening of the actuator for command values in the area of the limiting value. The
valve drive only closes when the command value undershoots the limiting value
minus the configured hysteresis.
The 1-byte data format with limiting value evaluation allows the conversion of con-
stant feedback control by the heating actuator into a two-point controller. This prin-
ciple is particularly suitable for underfloor heating, in which constant valve activa-
tion does not produce the desired heating reaction, on account of the sluggishness.
With sluggish underfloor heating systems, small constant command values (only
short switch-on phases of the PWM) frequently do not produce any significant level
of heating. With large constant command values, the short switch-off phases of a
PWM usually have no effect on underfloor heating systems or comparable heating
systems. Here, two-point feedback control offers a simple, effective alternative. The
valves open or close completely. During activation, unnecessary constant valve po-
sitions are avoided using command value telegrams. In addition, the service life of
the electrothermal actuators is increased.
The conversion of the constant input signal into a switching command value takes
place internally in the device. During processing, the actuator evaluates the con-
verted command value as if it were a received 1-bit command value. It forwards the
status directly to the appropriate output, taking the configured valve direction of ac-
tion into account. Thus, on a "Open valve" command (received command value >=
limiting value), the valve is opened completely. The output is then energised for en-
ergised closed valves and the output is deenergised for energised opened valve
drives. On a "Close valve" command (received command value < limiting value -
hysteresis), the valve is closed completely. The valve output is then not energised
for deenergised closed valves and energised for deenergised opened valve drives.
As with a 1-bit input command value, in the functions and events listed below,
valve outputs configured to the command value data formats "Constant (1-byte)
with command value limiting value" are always activated by a constant command
value with pulse width modulation (PWM), provided that command values not
equal to 0 % or 100 % are to be set...
– Active forced position,
– Active emergency operation,

SpaceLogic KNX Valve Drive Controller Cycle time
78 | MTN6730-0002 11.08.2020
– On bus voltage failure,
– After bus or mains voltage return,
– After an ETS programming operation,
– During a manual operation.
PWM keeps being executed until the named functions have been exited or, after
the named events, no more lower-level functions are active and a new command
value telegram is received via the bus, overriding the constant command value on
the valve output.
In the named cases, the constant command value is also included in the calculation
of the largest command value and that of the heat requirement and pump control
(optional functions).
Valve outputs, which receive preset command values via the data format "Switch-
ing (1-byte) with command value limiting value", influence the heat requirement and
pump control. Here, the actuator evaluates the converted switching output signal in
the same way ("OFF" is interpreted as "0 %", "ON" is interpreted as "100 %").
Image17: Example of command value evaluation with limiting value
10.4 Cycle time
The "Cycle time" parameter specifies the period length of the pulse-width-modu-
lated output signal of a valve output. It allows adaptation to the adjusting cycle
times (the adjusting time it takes the drive to bring the valve from its completely
closed to its completely opened position) of the valve drives used. In addition to the
adjusting cycle time, take account of the dead time (the time in which the actuators
do not show any response when being switched or off). If different actuators with
different adjusting cycle times are used at an output, take account of the longest of
the times.
The "Cycle time" parameter is also available for valve drives, whose command
value data format is configured to "Switching (1-bit)" or
"Constant (1-byte) with command value limiting value". For such valve outputs,
pulse width modulation can also be executed during an active forced position,
emergency operation, manual operation, bus voltage failure, after bus or mains
voltage return or after an ETS programming operation, for which, as a result, the
presetting of a cycle time is required.
Generally, two different options of how to set the cycle time can be identified:
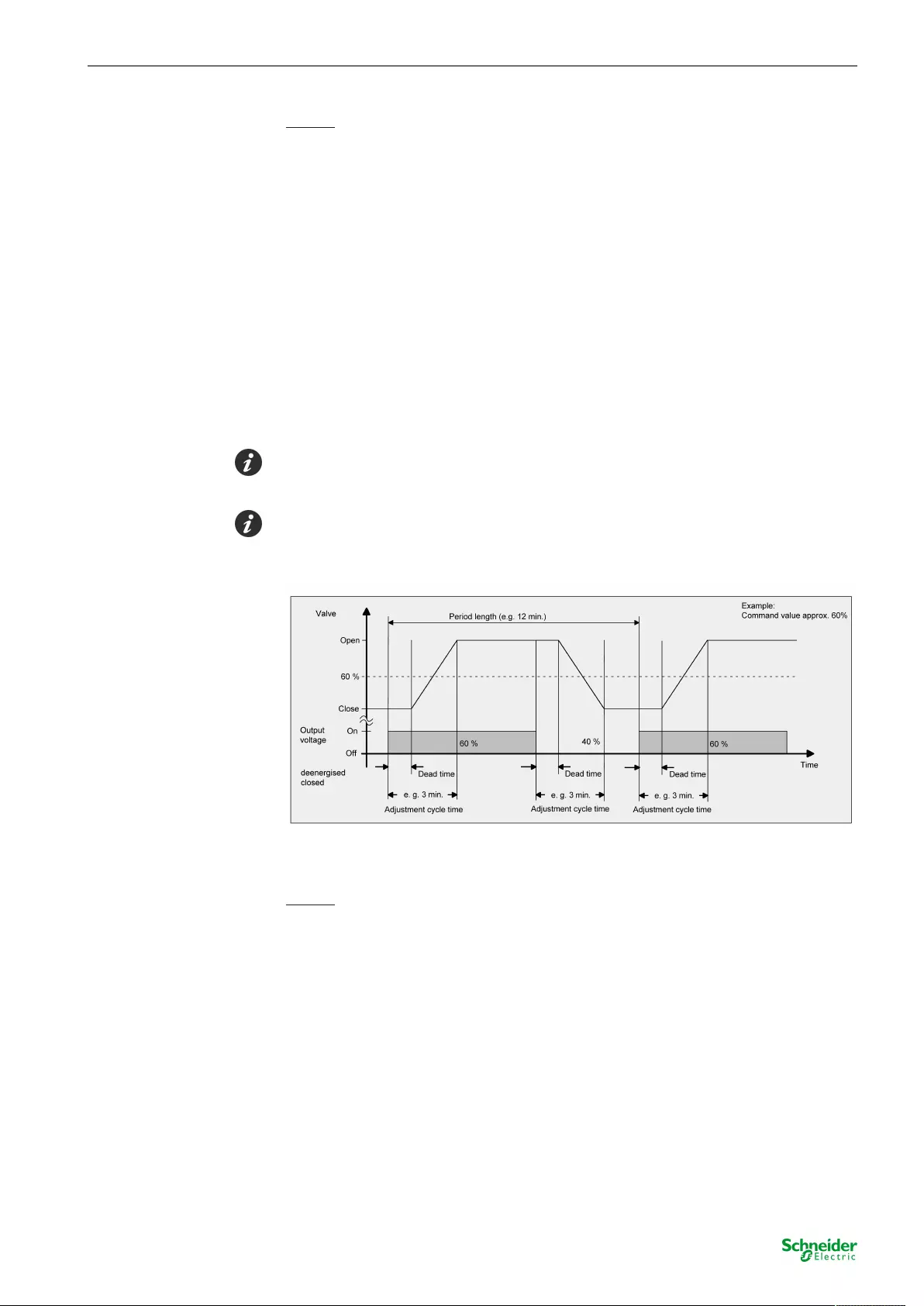
SpaceLogic KNX Valve Drive Controller Cycle time
79 | MTN6730-0002 11.08.2020
Case 1
Cycle time > 2 x Adjusting cycle time of the drives used (ETA)
In this case, the switch-on and switch-off times of the actuator are long enough for
the actuators to have sufficient time to fully open and fully close within a given
period (see figure 18).
– Advantage:
The desired mean value for the command value and thus for the required
room temperature will be set relatively precisely, even for several actuators
triggered at the same time.
– Disadvantage:
It should be noted, that, due to the full valve lift, the life expectancy of the
actuators can diminish. For very long cycle times (> 15 minutes) with less
sluggishness in the system, the heat emission into the room, for example, in
the vicinity of the radiators, can possibly be non-uniform and be found dis-
turbing.
This cycle time setting is recommended for slower, more sluggish heating systems
(such as underfloor heating).
Even for a bigger number of triggered actuators, maybe of different types, this set-
ting can be recommended to be able to obtain a better mean value of the adjusting
travels of the valves.
Image18: Ideal course of the valve stroke for a
cycle time > 2 x Adjustment cycle time
Case 2
Cycle time < Adjusting cycle time of the drives used (ETA)
In this case, the switch-on and switch-off times of the actuator are too short for the
actuators to have enough time to fully open and fully close within a given period
(see figure 19).
– Advantage: This setting ensures continuous water flow through the radiat-
ors, thus facilitating uniform heat emission into the room. If only one valve
drive is triggered the controller can continuously adapt the command value
to compensate the mean value shift caused by the short cycle time, thus
setting the desired room temperature.
– Disadvantage: If more than one drive is activated at the same time, the de-
sired mean value will become the variable, which will result in a very poor
adjustment of the required room temperature, or in adjustment of the latter
with major deviations, respectively.
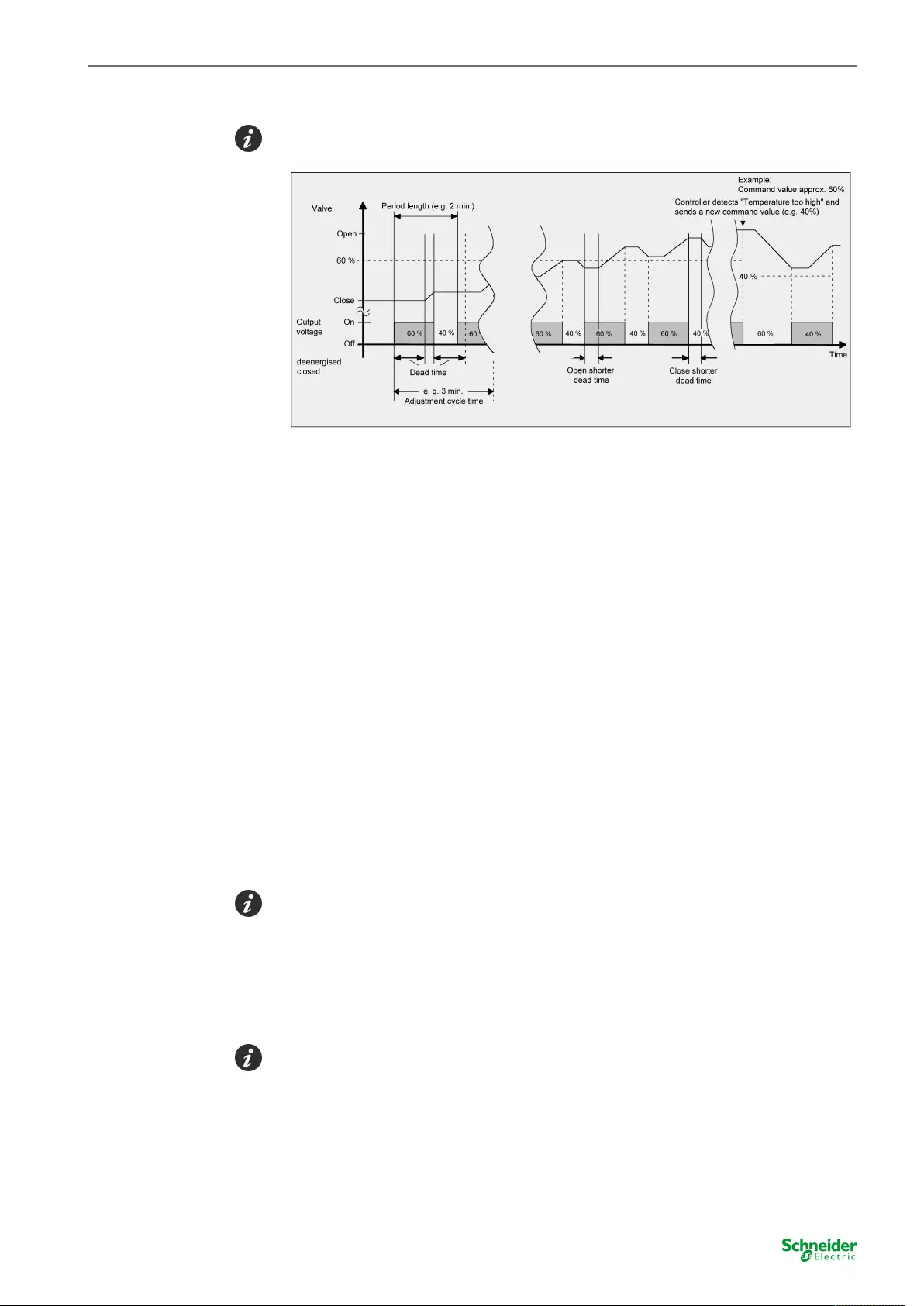
SpaceLogic KNX Valve Drive Controller forced position
80 | MTN6730-0002 11.08.2020
This setting is recommended for quicker heating systems (such as radiators).
Image19: Ideal course of the valve stroke for a
cycle time < Adjustment cycle time
The continuous flow of water through the valve, and thus the continuous heating of
the drives causes variations and changes to the dead times of the drives during the
opening and closing phase. The short cycle time and the dead times means that
the required command value (mean value) is only set with a possibly large devi-
ation. For the room temperature to be regulated constantly after a set time, the
controller must continually adjust the command value to compensate for the mean
value shift caused by the short cycle time. Usually, the control algorithm implemen-
ted in the controller (PI control) ensures that control deviations are compensated.
10.5 forced position
A forced position can be configured separately for each valve output and activated
according to requirements. If a forced position is active, a defined command value
is set at the output. Affected valve outputs are then locked so that they can no
longer be activated using functions subject to the forced position (including activa-
tion by command value telegrams).
The command value of the forced position is always constant and is configured in-
dividually in the ETS (0...100 % in 10 % steps). The command value is executed
electrically at the output using a pulse width modulation (PWM).
When a forced position is active, valve outputs configured to the command value
data formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting
value" are always activated by a constant command value with pulse width modula-
tion. In this case, this constant command value is also included in the calculation of
the largest command value (optional function) until the forced position is exited and
no other function with a constant command value presetting (e.g. emergency oper-
ation, manual operation) is active.
The configured valve direction of action (deenergised closed / deenergised opened)
is taken into account in the electrical activation of the outputs by a forced position.
With deenergised closed valves, the switch-on time is derived directly from the con-
figured PWM and the cycle time. In the case of deenergised opened valves, the
switch-on time is inverted.
The actuator possesses a summer / winter switchover. Depending on the season,
this allows the setting of different command value setpoints for a valve output for
forced position (siehe Kapitel "Summer/winter switch-over for valve outputs" }
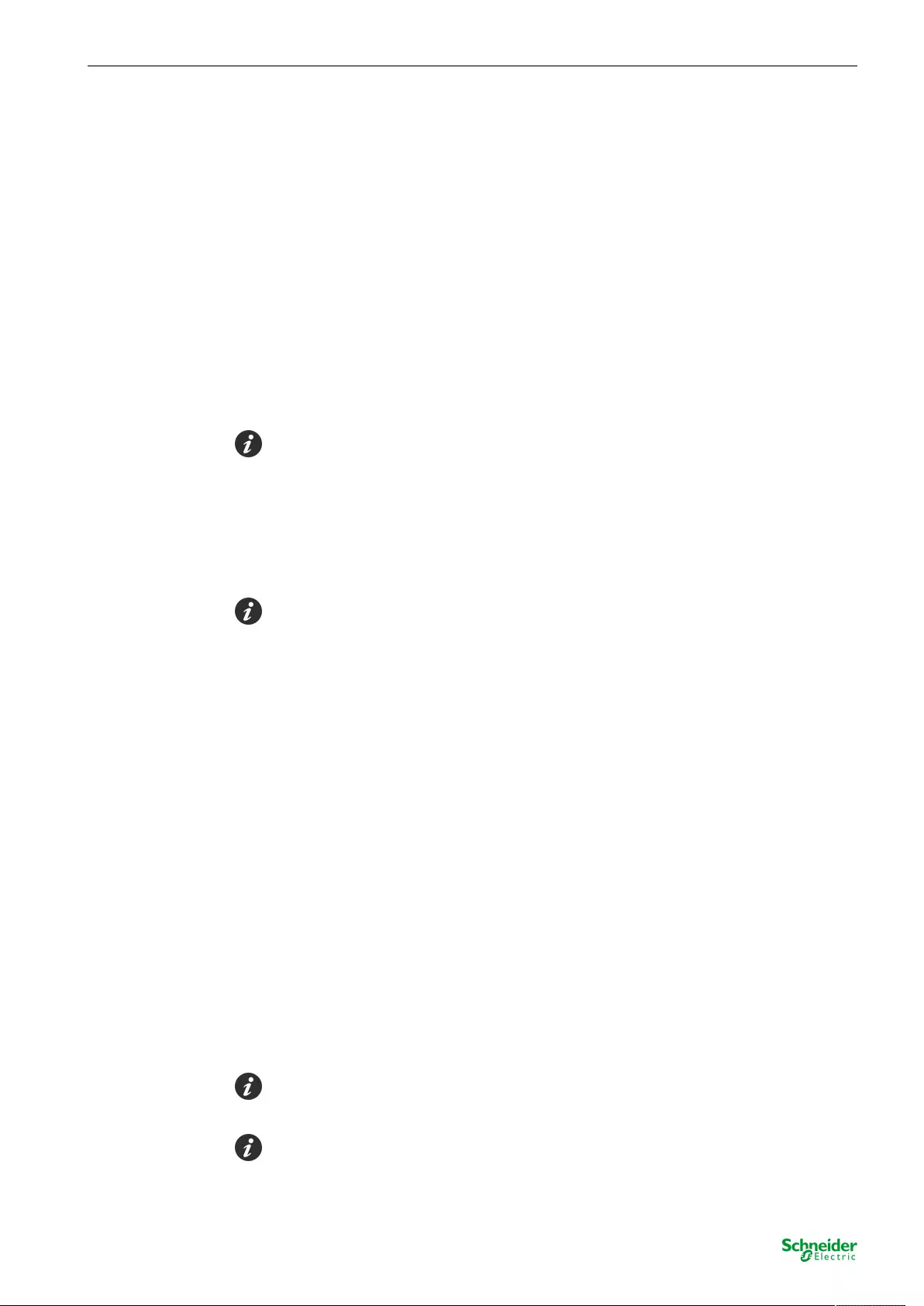
SpaceLogic KNX Valve Drive Controller forced position
81 | MTN6730-0002 11.08.2020
Page 43). It is also possible to switch over the operating mode during an active
forced position. In this case, the value belonging to the operating mode is activated
immediately after the switch-over.
If no summer / winter switch-over is planned in the actuator, then only a command
value can be configured in the ETS for the forced position.
For each valve output, the forced position is activated and deactivated via a separ-
ate 1-bit object. The telegram polarity can be configured. According to the priority
control, an active forced position can be overridden by other device functions with
a higher priority (e.g. service mode, manual operation). At the end of a higher prior-
ity function, the actuator executes the forced reaction for the valve outputs con-
cerned once again if the forced position is still activated at this time.
Optionally, the command value of the forced position can also be activated in case
of bus voltage failure, after bus/mains voltage return or after an ETS programming
operation. This is only the recall of the configured command value and not the ac-
tivation of the forced position as takes place via the 1-bit object.
The command value preset by an active forced position is also included in the de-
termination of heat requirement. In addition, the command value of the forced posi-
tion has an influence on the pump control.
At the end of a forced position, the behaviour of a valve output is permanently
defined. For the affected valve outputs, the actuator always tracks the state most
recently preset by functions with a lower priority (emergency operation) or by nor-
mal bus operation (activation by command value telegrams).
After a device reset (bus/mains return, ETS programming operation), the command
value objects first contain the value "0".
Enabling the forced position object and configuring
the forced position
For the forced position to be used as a locking function, it must first be enabled in
the ETS on the parameter page "Ax - Command value/Status/Operating mode" and
be visibly switched by the communication object.
■ Set the parameter "Use object for forced position ?" to "yes". Define the
parameter "Polarity of 'Forced position' object" to the required telegram po-
larity. In addition, configure the required command values (optional for sum-
mer and winter mode).
The forced position object is enabled. The affected valve output is locked by
a telegram according to the "Forced operation active" polarity at the defined
command value (optional according to the most recently preset operating
mode).
■ Set the parameter "Use object for forced position ?" to "no".
The forced position object is not enabled. The forced position for locking the
valve output is not possible. Only the command values can be configured,
so that a state for the reset behaviour of the valve output can be optionally
defined.
Updates of the object from "Forced position active" to "Forced position active" or
from "Forced position inactive" to "Forced position inactive" produce no reaction.
The status preset via the forced position object is stored internally in the device
after a bus voltage failure and and is restored automatically after a bus and/or
mains voltage return. After a bus/mains voltage return, the actuator activates the
forced position, thus locking the output, if the tracked state allows this. However,
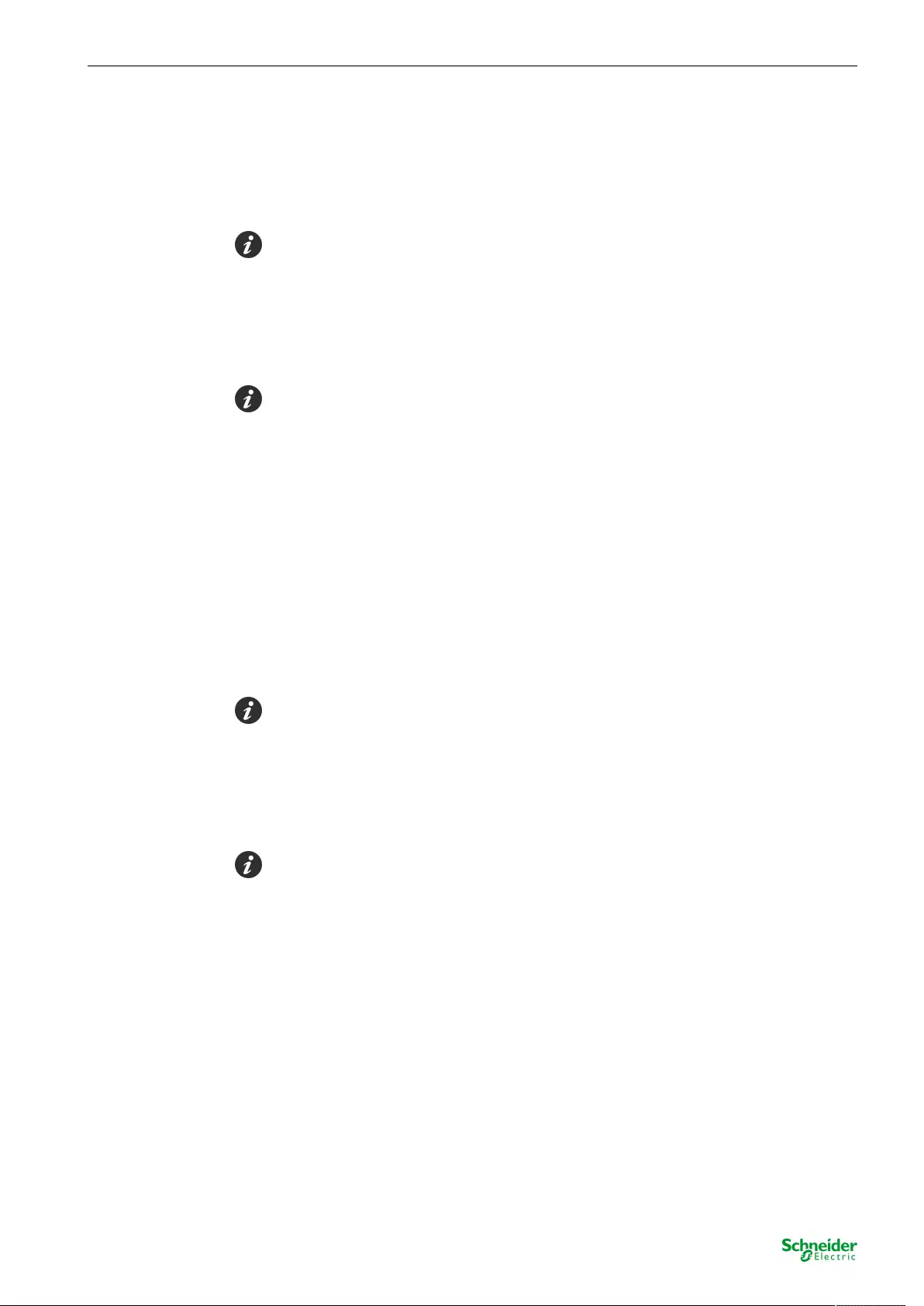
SpaceLogic KNX Valve Drive Controller
Cyclical command value monitoring / emergency
operation
82 | MTN6730-0002 11.08.2020
when presetting the command values, only that behaviour is significant, according
to the priority sequence, which the parameter "Behaviour after bus or mains voltage
return" devices (the command value of the forced position is not activated).
The tracked state of the forced position is not then automatically tracked in the
communication object by the actuator.
After an ETS programming operation, a forced position is always deactivated and
the forced position object is "0". In the polarity "0" = Forced position active / "1" =
No forced position, a "0" telegram must first be received to activate the forced posi-
tion.
If, after a bus/mains voltage return, the previously stored object value "0" is re-
stored, then actuator will also activate the forced position in the polarity "0 = Forced
position active / 1 = No forced position", thus locking the output.
If the forced position object is not enabled, then only the command value paramet-
ers are available, so that valid preset values are available for the actuator reset be-
haviour, as required ("Activate command values as for forced position").
10.6 Cyclical command value monitoring /
emergency operation
If necessary, cyclical monitoring of the command values can be performed. If, dur-
ing active cyclical monitoring, there are no command value telegrams during a pre-
set time, then emergency operation is activated for the affected valve output, for
which a configurable constant PWM command value can be preset in the ETS.
The command value of emergency operation is always constant and is configured
individually in the ETS (0...100 % in 10 % steps). The command value is executed
electrically at the output using a pulse width modulation (PWM).
When emergency operation is active, valve outputs configured to the command
value data formats "Switching (1-bit)" or "Constant (1-byte) with command value
limiting value" are always activated by a constant command value with pulse width
modulation. In this case, this constant command value is also included in the calcu-
lation of the largest command value (optional function) until the emergency opera-
tion is exited and no other function with a constant command value presetting (e.g.
forced position, manual operation) is active.
The configured valve direction of action (deenergised closed / deenergised opened)
is taken into account in the electrical activation of the outputs by emergency opera-
tion. With deenergised closed valves, the switch-on time is derived directly from the
configured PWM and the cycle time. In the case of deenergised opened valves, the
switch-on time is inverted.
The actuator possesses a summer / winter switchover. Depending on the season,
this allows the setting of different command value setpoints for a valve output for
emergency operation (siehe Kapitel "Summer/winter switch-over for valve out-
puts" } Page 43). It is also possible to switch over the operating mode during active
emergency operation. In this case, the value belonging to the operating mode is
activated immediately after the switch-over.
If no summer / winter switch-over is planned in the actuator, then only a command
value can be configured in the ETS for emergency operation.
If command value monitoring is enabled, then the actuator will check the arrival of
telegrams on the command value object during a settable time period. The time
period is defined separately for each valve output by the "Monitoring time" para-
meter. The time set there should be at least double the time for the cyclical trans-
mission of the command value of the controller, in order to ensure that at least one
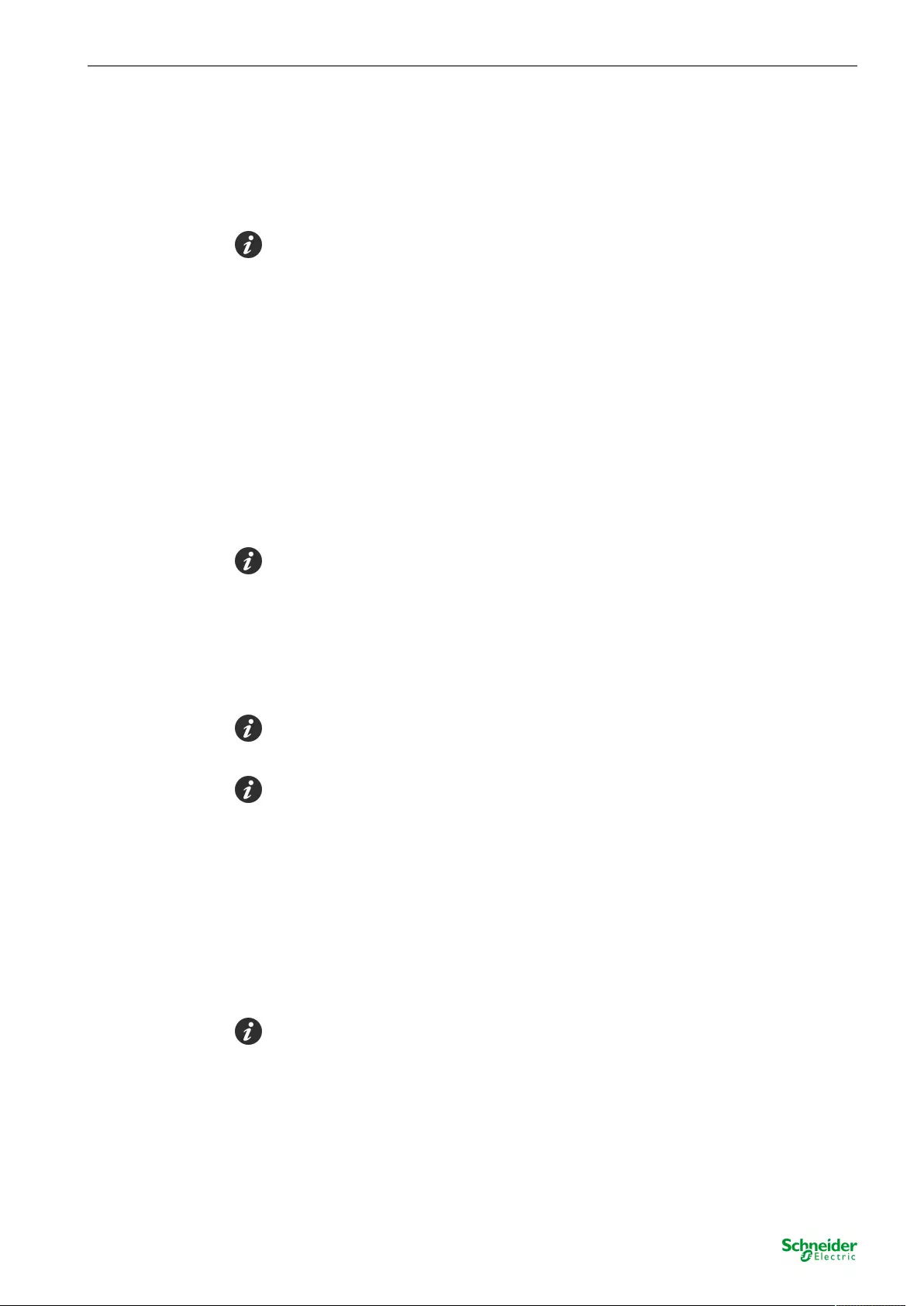
SpaceLogic KNX Valve Drive Controller
Cyclical command value monitoring / emergency
operation
83 | MTN6730-0002 11.08.2020
telegram is received within the monitoring time. Cyclical command value monitoring
takes place continuously. The actuator retriggers the monitoring time automatically
on each command value telegram received and after a device reset. If there are no
command value telegrams during the monitoring time, then the actuator will activ-
ate emergency operation.
If the bus control of a valve output was disabled during permanent manual opera-
tion, then no command value monitoring is performed for the affected output. This
exits active emergency operation. When bus control is enabled by a permanent
manual operation, the actuator restarts the monitoring time and checks for incom-
ing command value telegrams.
According to the priority control, active command value monitoring can be overrid-
den by other device functions with a higher priority (e.g. service mode, manual op-
eration). At the end of a higher priority function, the actuator executes emergency
operation for the valve outputs concerned once again, if it is still activated by miss-
ing command value telegrams.
Optionally, the command value of emergency operation can also be activated in
case of bus voltage failure, after bus/mains voltage return or after an ETS program-
ming operation. This is only the recall of the configured command value and not
the activation of emergency operation, as takes place during command value mon-
itoring.
The command value preset by active emergency operation is also included in the
determination of heat requirement. In addition, the command value of emergency
operation has an influence on the pump control.
At the end of emergency operation (new input command value received), the beha-
viour of a valve output is permanently defined. If no function with a higher priority is
active, the actuator always tracks the state for the affected valve outputs most re-
cently preset by normal bus operation (activation by command value telegrams).
After a device reset (bus/mains voltage return, ETS programming operation), the
command value objects first contain the value "0".
The state or emergency operation (active or inactive) is saved internally in the
device after a bus voltage failure and and is restored automatically after a bus and/
or mains voltage return. After a bus/mains voltage return, the actuator activates
emergency operation, if the tracked state allows this.
The actuator makes the 1-bit status telegram "Command value fault" available. As
soon as a command value telegram is missing on a monitored valve output, and
thus emergency operation is activated, then the actuator transmits a fault signal via
this status object. The telegram polarity can be configured. Only after at least one
command value telegram has been received for the monitored valve output does
the actuator retract the fault signal for cyclical monitoring. Optionally, the fault tele-
gram can also be transmitted cyclically during active emergency operation.
Immediately after the bus voltage return or an ETS programming operation, the ob-
ject "Command value fault" does not transmit the status automatically. A faulty
command value must be detected again (expiry of the monitoring time without a
command value telegram) for the object value to be transmitted. This is also the
case if a saved emergency operation was restored after a device reset.
Enable cyclical command value monitoring
Cyclical command value monitoring can only be used if it has been enabled in the
ETS.

SpaceLogic KNX Valve Drive Controller Command value limit
84 | MTN6730-0002 11.08.2020
■ Set the parameter "Activate command value monitoring ?" on parameter
page "Ax - Command value/Status/Operating mode" to "Yes". Configure the
"Monitoring time" of the command value monitoring.
Cyclical command value monitoring is activated. If there are no command
value telegrams during the monitoring time preset by the parameter of the
same name, then emergency operation is activated for the affected valve
output, for which the actuator sets to a configurable constant PWM com-
mand value. This command value is fined by the Command value in the
case of emergency operation..." parameter (if necessary, separately for
summer and winter mode).
■ Set the parameter "Activate command value monitoring ?" to "no".
Cyclical command value monitoring is deactivated.
Configuring the fault signal for cyclical command
value monitoring
If a command value fault is identified, then the actuator can optionally transmit a
fault telegram via the object "Command value fault".
■ Set the parameter "Polarity of 'Command value fault' object" on parameter
page "Ax - Command value/Status/Operating mode" to the required tele-
gram polarity.
As soon as a command value telegram is missing on a monitored valve out-
put, and thus emergency operation is activated, then the actuator transmits
a fault signal via the status object "Command value fault" according to the
configured telegram polarity. Only after at least one command value tele-
gram has been received for the monitored valve output does the actuator
retract the fault signal for cyclical monitoring.
■ Set the parameter "Cyclical transmission in the case of faulty command
value ?" to "yes".
If a command value fault is identified, then the actuator transmits the fault
telegram cyclically. The cycle time is defined for all cyclical status and feed-
back functions on the "General" parameter page.
■ Set the parameter "Cyclical transmission in the case of faulty command
value ?" to "no".
If a command value fault is identified, then the actuator transmits the fault
telegram only once.
10.7 Command value limit
Enabling the command value limit
The command value limit can only be used if it has been enabled in the ETS.
■ Set the "Command value limit ?" parameter on parameter page "Ax - Com-
mand value/Status/Operating mode" to "Yes".
The command value limit is enabled. The "Activation of the command value
limit" parameter defines whether the limiting function can be activated or de-
activated as required via a communication object. Alternatively, the com-
mand value limit can be permanently active.
■ Set the "Command value limit ?" parameter to "no".
The command value limit is not available.

SpaceLogic KNX Valve Drive Controller Command value limit
85 | MTN6730-0002 11.08.2020
Setting the activation of the command value limit
The "Activation of the command value limit" parameter on the parameter page "Ax
- Command value/Status/Operating mode" defines the mode of action of the limit-
ing function.
The command value limit must be enabled.
■ Set the parameter to "By object 'Command value limit".
The command value limit can only be activated using the 1-bit communica-
tion object "Command value limit" ("1" telegram) or deactivated ("0" tele-
gram). The behaviour of the command value limit is definable separately
after a device reset (bus voltage return, ETS programming operation).
■ Set the parameter to "Permanently activated".
The command value limit is permanently active. It cannot be influenced via
an object. Command values preset via the KNX or via emergency operation
are always limited.
Setting the initialisation behaviour of the command
value limit
The command value limit can either be activated or deactivated using the 1-bit
communication object "Command value limit", or be permanently active. When
controlling via the object, it is possible to have the controller activate the command
value limit automatically after bus voltage return or an ETS programming operation.
The parameters "Activate command value limit after bus voltage return ?" and "Ac-
tivate command value limit after ETS programming" define the initialisation beha-
viour.
With a permanently active command value limit, the initialisation behaviour cannot
be configured after bus voltage return or an ETS programming operation, as the
limit is always active. In this case, no object is available.
The command value limit must be enabled.
■ Set the "Activate command value limit after bus voltage return ?" parameter
to "no".
The command value limit is not activated automatically after bus voltage re-
turn. A "1" telegram must first be received via the "Command value limit" ob-
ject for the limiting function to be activated.
■ Set the "Activate command value limit after bus voltage return ?" parameter
to "yes".
In this setting, the actuator does not activate the command value limit auto-
matically after bus voltage return. To deactivate the limit a "0" telegram must
be received via the "Command value limit" object. The limit can be switched
on or off at any time using the object.
■ Set the "Activate command value limit after ETS programming ?" parameter
to "no".
The command value limit is not activated automatically after an ETS pro-
gramming operation. A "1" telegram must first be received via the "Com-
mand value limit" object for the limiting function to be activated.
■ Set the "Activate command value limit after ETS programming ?" parameter
to "yes".
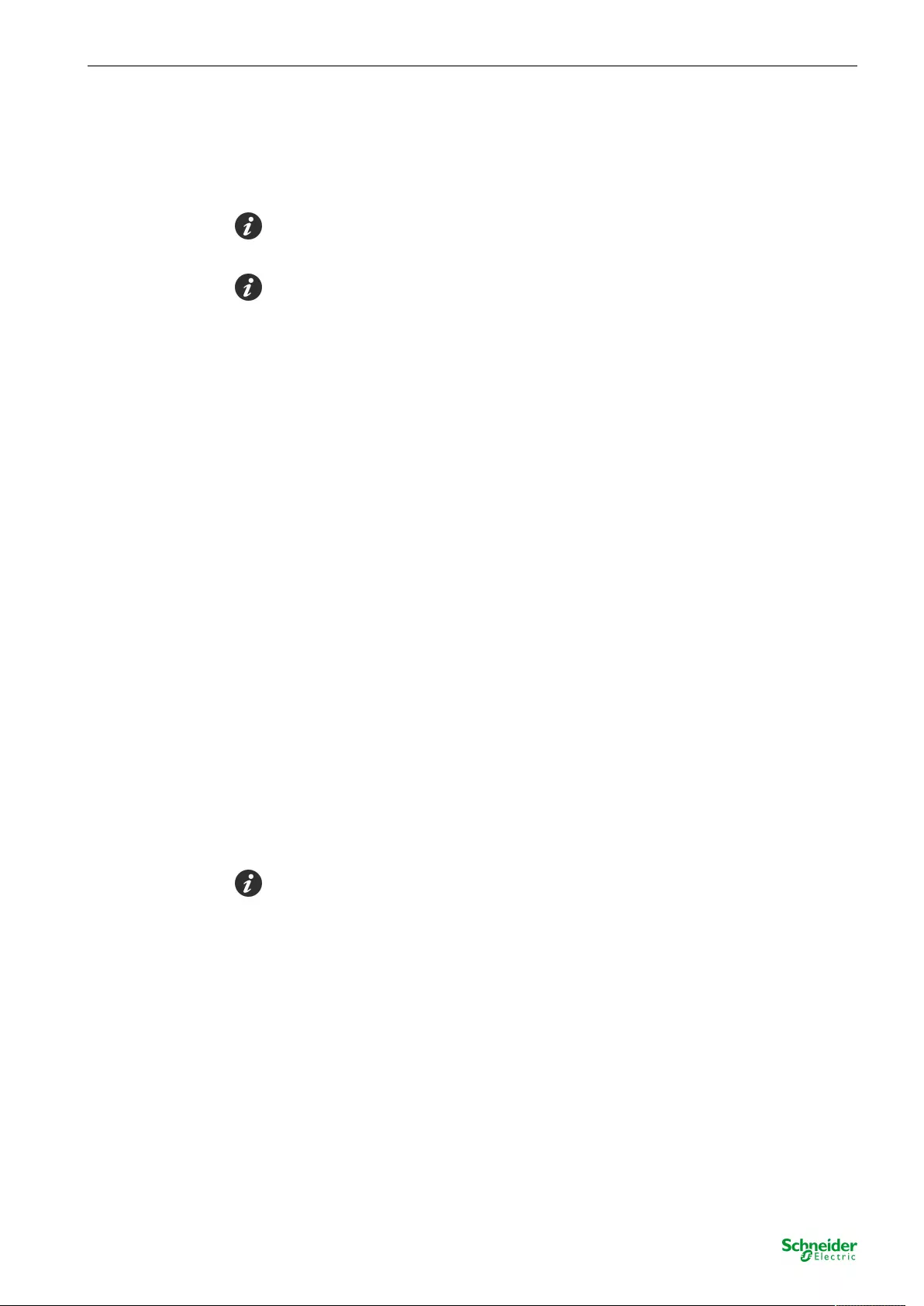
SpaceLogic KNX Valve Drive Controller Status functions
86 | MTN6730-0002 11.08.2020
In this setting, the actuator activates the command value limit automatically
after an ETS programming operation. To deactivate the limit a "0" telegram
must be received via the "Command value limit" object. The limit can be
switched on or off at any time using the object.
The status of the command value limit is not automatically tracked in the commu-
nication object after a device reset.
It should be checked that, on account of priority control, the actuator executed the
behaviour configured by the parameters "Behaviour after bus or mains voltage re-
turn" and "Behaviour after an ETS programming operation" on the parameter page
"Ax - General" after bus voltage return and an ETS programming operation. The
command values preset via configuration after a device reset are not influenced by
a command value limit. A command value limit only influences the input command
values preset via the bus or emergency operation command values during com-
mand value monitoring.
10.8 Status functions
Command value status
A status object can be optionally enabled for each valve output. The status object
makes the active command value of a valve output available either actively trans-
mitting or passively (object can be read out). During status feedback, the actuator
takes all the functions into account which have an influence on the command value
implemented at the output. Depending on the configured data format of the input
command value, the status object will possess the data formats named below...
– Input command value "Switching (1-bit)":
Data format of status object "1-bit",
– Input command value "Constant (1-byte) with pulse width modulation
(PWM)":
Data format of status object "1-byte",
– Input command value "Constant (1-byte) command value limiting value":
Data format of status object "1-bit".
The status objects will assume different status values, depending on the input data
formats of the command values and the state of operation of a valve output.
The actuator distinguishes between different functions and events that can have an
effect on the valve outputs. Because these functions and events cannot be ex-
ecuted simultaneously, there is priority control. Each global or output-orientated
function and each incoming event possesses a priority (siehe Kapitel "Priorities for
valve outputs" } Page 31). The function or the event with the higher priority over-
rides the lower-priority functions and events.
Priority control also influences the status objects. That state is always transmitted
as the status which is currently set at a valve output. If a function with a high priority
is exited, then the status objects assume the command value of functions with a
lower priority, providing that they are active.
Status value for input command value "Switching (1-bit)"...
– State of operation "Normal operation"
-> Status value = Most recently received input command value ("0" or "1"),
– State of operation "Emergency operation" (0...100 %)
-> Status value = Emergency operation command value ("0" at 0 %,
"1" at 1...100 %),

SpaceLogic KNX Valve Drive Controller Status functions
87 | MTN6730-0002 11.08.2020
– State of operation "Forced position" (0...100 %)
-> Status value = Forced command value ("0" at 0 %, "1" at 1...100 %),
– State of operation "Valve rinsing" (0 %, 100 %)
-> Status value = Current command value in rinsing operation ("0" when
valve closed, "1" when valve opened),
– State of operation "Service mode" (0 %, 100 %)
-> Status value = Service command value ("0" when valve forcibly closed,
"1" when valve forcibly opened),
– State of operation "After device reset" (0...100 %)
-> Status value = According to presetting by parameter "Behaviour after bus
or mains voltage return" or "Behaviour after ETS programming
operation" ("0" at 0 %, "1" at 1...100 %),
– State of operation "Manual operation" (5...100 %)
-> Status value = Manual operation command value ("0" at 0 % CLOSE,
"1" at 5...100 % OPEN),
– State of operation "Valve voltage failure" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0"
when deenergised closed, "1" when deenergised opened),
– State of operation "Short-circuit / overload" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0"
when deenergised closed, "1" when deenergised opened).
Status value for input command value "Constant (1-byte) with pulse width modula-
tion (PWM)"...
– State of operation "Normal operation" -> Status value = Most recently re-
ceived input command value (0...100 %),
– State of operation "Emergency operation" (0...100 %)
-> Status value = Emergency operation command value (0...100 %),
– State of operation "Forced position" (0...100 %)
-> Status value = Forced command value (0...100 %),
– State of operation "Valve rinsing" (0 %, 100 %)
-> Status value = Current command value in rinsing operation ("0 %" when
valve closed, "100 %" when valve opened),
– State of operation "Service mode" (0 %, 100 %)
-> Status value = Service command value ("0 %" when valve forcibly closed,
"100 %" when valve forcibly opened),
– State of operation "After device reset" (0...100 %)
-> Status value = According to presetting by parameter "Behaviour after bus
or mains voltage return" or "Behaviour after ETS programming
operation" ("0" at 0 %, "1" at 1...100 %),
– State of operation "Manual operation" (5...100 %)
-> Status value = Manual operation command value (0 % CLOSE,
5...100 % OPEN),
– State of operation "Valve voltage failure" (0 %, 100 %)
-> Status value = Command value according to valve direction of action (0
% when deenergised closed, 100 % when deenergised opened),
– State of operation "Short-circuit / overload" (0 %, 100 %)
-> Status value = Command value according to valve direction of action (0
% when deenergised closed, 100 % when deenergised opened).
Status value for input command value "Constant (1-byte) command value limiting
value"...

SpaceLogic KNX Valve Drive Controller Status functions
88 | MTN6730-0002 11.08.2020
– State of operation "Normal operation"
-> Status value = According to evaluation of the input command value by
limiting value and hysteresis ("0" for command value < limiting value - hys-
teresis or "1" for command value >= limiting value),
– State of operation "Emergency operation" (0...100 %)
-> Status value = Emergency operation command value ("0" at 0 %,
"1" at 1...100 %),
– State of operation "Forced position" (0...100 %)
-> Status value = Forced command value ("0" at 0 %, "1" at 1...100 %),
– State of operation "Valve rinsing" (0 %, 100 %)
-> Status value = Current command value in rinsing operation ("0" when
valve closed, "1" when valve opened),
– State of operation "Service mode" (0 %, 100 %)
-> Status value = Service command value ("0" when valve forcibly closed,
"1" when valve forcibly opened),
– State of operation "After device reset" (0...100 %)
-> Status value = According to presetting by parameter "Behaviour after bus
or mains voltage return" or "Behaviour after ETS programming
operation" ("0" at 0 %, "1" at 1...100 %),
– State of operation "Manual operation" (5...100 %)
-> Status value = Manual operation command value ("0" at 0 % CLOSE,
"1" at 5...100 % OPEN),
– State of operation "Valve voltage failure" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0"
when deenergised closed, "1" when deenergised opened),
– State of operation "Short-circuit / overload" (0 %, 100 %)
-> Status value = Command value according to valve direction of action ("0"
when deenergised closed, "1" when deenergised opened).
Activating the command value status function
The status feedback is a function of the valve outputs and can be enabled on the
parameter pages "Ax - Command value/Status/Operating mode".
■ Set the "Feedback valve command value" parameter to "Yes".
Status feedback is enabled. The status object of the valve output becomes
visible in the ETS.
■ Set the parameter to "no".
Status feedback is deactivated. No status object is available.
Setting the type of the command value status function
The status feedback can be used as an active signal object or as a passive status
object. As an active signal object, the feedback is also directly transmitted to the
bus whenever there is a change to the status value. As a passive status object,
there is no telegram transmission after a change. In this case, the object value
must be read out. The ETS automatically sets the communication flags of the
status objects required for proper functioning.
The parameter "Type of feedback" exists separately for each valve output on the
parameter page "Ax - Command value/Status/Operating mode".
Status feedback must be enabled.
■ Set the parameter to "Active signalling object".
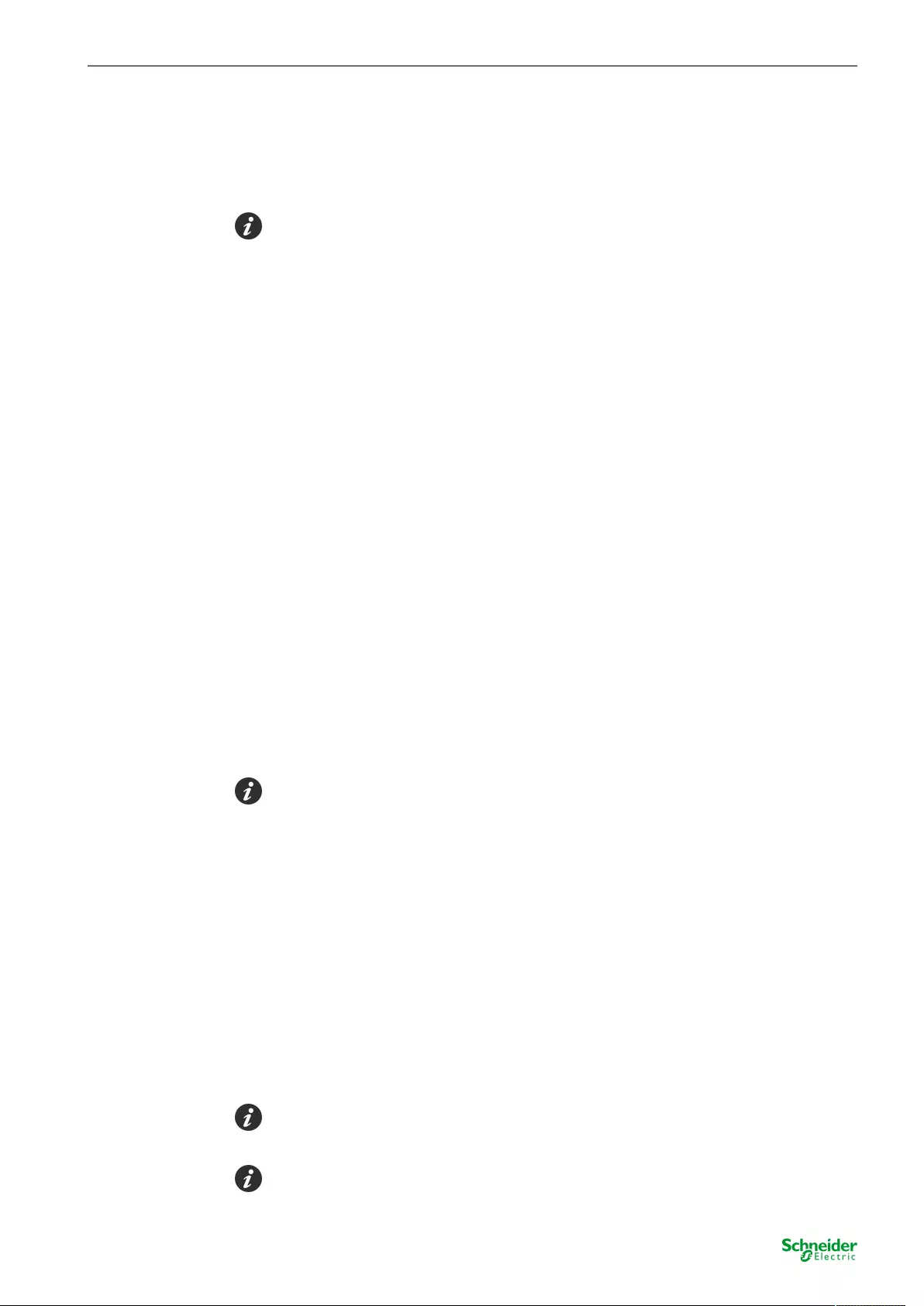
SpaceLogic KNX Valve Drive Controller Status functions
89 | MTN6730-0002 11.08.2020
The feedback telegram is transmitted as soon as the status changes. An
automatic telegram transmission of the feedback takes place after bus
voltage return, if the supply voltage of the actuators fails and returns or after
an ETS programming operation (possibly with a delay).
The status object does not transmit if the status does not change after the activa-
tion or deactivation of device functions or new input command values. Transmis-
sion only ever takes place after changes to the command value.
■ Set the parameter to "Passive status object".
The feedback telegram will only be transmitted in response if the status ob-
ject is read out from the bus by a read telegram. No automatic telegram
transmission of the feedback takes place after bus voltage return, if the sup-
ply voltage of the actuators fails and returns or after an ETS programming
operation.
Setting the time delay of the command value status
feedback
If used as active signal object, the state of the status feedback information is trans-
mitted to the bus after bus voltage return or after an ETS programming operation.
In these cases, feedback can be time-delayed with the time delay being preset
globally for all valve outputs together on the "General" parameter page.
■ Set the parameter "Time delay for feedback after bus voltage return ?" to
"yes".
The status feedback will be transmitted with a delay after bus voltage return
or after an ETS programming operation. No feedback is transmitted during a
running time delay, even if the valve state changes during this delay.
■ Set the parameter "Time delay for feedback after bus voltage return ?" to
"no".
The status feedback will be transmitted immediately after bus voltage return
or after an ETS programming operation.
If the supply voltage of the actuators fails and returns, then the status feedback is
always transmitted without a delay, providing that the bus voltage supply is
switched on.
Setting cyclical transmission of the command value
status feedback
The status feedback telegram can also be transmitted cyclically via the active sig-
nal object in addition to the transmission after changes.
■ Set the parameter "Cyclical transmission of feedback telegram?" to "yes".
Cyclical transmission is activated.
■ Set the parameter "Cyclical transmission of feedback telegram?" to "no".
Cyclical transmission is deactivated so that the feedback telegram is trans-
mitted to the bus only when the status is changed by the actuator.
The cycle time is defined centrally for all the valve outputs on the parameter page
"General".
There is no cyclical transmission during an active time delay after bus voltage re-
turn or an ETS programming operation.

SpaceLogic KNX Valve Drive Controller Status functions
90 | MTN6730-0002 11.08.2020
Combined valve status
The combined valve status allows the collective feedback of various functions of a
valve output in a single 1-byte bus telegram. It helps to forward the status informa-
tion of an output to a suitable recipient (e.g. KNX visualisation) in a targeted man-
ner, without having to evaluate various global and channel-orientated feedback and
status functions of the actuator. The communication object "Feedback combined
valve status" contains 7 different items of status information, which are bit-encoded
(see figure 20).
Image20: Bit encoding of the object "Feedback combined valve status"
The bits of the combined valve status feedback have the meaning given below...
– Bit 0 "Command value status":
The command value status always transmits the command value status cur-
rently set at a valve output. Here, the priority control of the actuator is taken
into account. Functions or events with a higher priority override lower-level
functions and events. If a function with a high priority is exited, then the
status information assumes the command value of functions with a lower
priority, providing that they are active.
The active command value is always made available as 1-bit information in
the combined object. Constant command values (PWM at the valve output)
are converted into a 1-bit status (status "0" = Command value 0 % / status
"1" = Command value 1...100 %).
– Bit 1 "Short-circuit":
In this status bit, the value "1" forwards the information that the valve output
has a short-circuit. The bit becomes "1" as soon as the actuator has suc-
cessfully performed the testing cycle for short-circuit detection. The bit be-
comes "0" when the short-circuit has been eliminated and reset.
– Bit 2 "Overload":
In this status bit, the value "1" forwards the information that the valve output
has an electrical overload. The bit becomes "1" as soon as the actuator has
successfully performed the testing cycle for overload detection. The bit be-
comes "0" when the overload has been eliminated and reset.
– Bit 3 "Valve rinsing":
When "1", this bit indicates active valve rinsing (rinsing operation time run-
ning). In the "0" status, no valve rinsing is active.
– Bit 4 "Service mode":
Service mode is a global function of the actuator. Individual valve outputs
can be assigned to service mode. When "1", this bit displays an active ser-
vice mode. The affected valve output then sets the command value of the
service mode. In this case, the output is disabled for activation by the bus
using input command values. In the "0" status, no service mode is active.
– Bit 5 "Manual operation":
Manual operation is also a global function of the actuator. The command
value of individual valve outputs can be influenced in the course of a
SpaceLogic KNX Valve Drive Controller Status functions
91 | MTN6730-0002 11.08.2020
manual operation. When "1", this bit displays an active permanent manual
operation. In the "0" status, no manual operation is active. In a temporary
manual operation, the status in the combined object does not become "1".
– Bit 6 "Forced position":
When "1", this bit displays an active forced position. In the "0" status, no
forced position is active.
– Bit 7 "Not assigned":
This bit is always "0".
Activating the combined valve status
The combined status feedback is a function of the valve outputs and can be en-
abled on the parameter pages "Ax - Command value/Status/Operating mode".
■ Set the "Feedback combined valve status ?" parameter to "Yes".
The feedback of the combined valve status is enabled. The 1-byte status
object becomes visible in the ETS.
■ Set the parameter to "no".
The feedback of the combined valve status is deactivated. No 1-byte status
object is available.
Setting the type of the combined valve status
The combined valve status can be used as an active signal object or as a passive
status object. As an active signal object, the feedback is also directly transmitted to
the bus whenever there is a change to the status value. As a passive status object,
there is no telegram transmission after a change. In this case, the object value
must be read out. The ETS automatically sets the communication flags of the
status objects required for proper functioning.
The parameter "Type of combined status feedback" exists separately for each
valve output on the parameter page "Ax - Command value/Status/Operating
mode".
The combined status feedback must be enabled.
■ Set the parameter to "Active signalling object".
The feedback telegram is transmitted as soon as the status changes. Auto-
matic telegram transmission of the feedback takes place after bus voltage
return and after an ETS programming operation (possibly with a time delay).
The combined status object does not transmit if the status information does not
change after the activation or deactivation of device functions or new input com-
mand values. Only changes are ever transmitted.
If the supply voltage of the actuators fails and returns, then the combined status
feedback is not transmitted.
■ Set the parameter to "Passive status object".
The feedback telegram will only be transmitted in response if the status ob-
ject is read out from the bus by a read telegram. No automatic telegram
transmission of the feedback takes place after bus voltage return or after
programming with the ETS.
SpaceLogic KNX Valve Drive Controller Short-circuit and overload detection
92 | MTN6730-0002 11.08.2020
Setting the time delay of the combined valve status
If used as active signal object, the state of the combined status feedback informa-
tion is transmitted to the bus after bus voltage return or after an ETS programming
operation. In these cases, feedback can be time-delayed with the time delay being
preset globally for all valve outputs together on the "General" parameter page.
■ Set the parameter "Time delay for feedback after bus voltage return ?" to
"yes".
The combined status feedback will be transmitted with a delay after bus
voltage return or after an ETS programming operation. No feedback is
transmitted during a running delay, even if the status information changes
during this delay.
■ Set the parameter "Time delay for feedback after bus voltage return ?" to
"no".
The combined status feedback will be transmitted immediately after bus
voltage return or after an ETS programming operation.
Setting cyclical transmission of the combined valve
status
The feedback telegram of the combined valve status can also be transmitted cyc-
lically via the active signal object in addition to the transmission after changes.
■ Set the parameter "Cyclical transmission of feedback telegram?" to "yes".
Cyclical transmission is activated.
■ Set the parameter "Cyclical transmission of feedback telegram?" to "no".
Cyclical transmission is deactivated so that the feedback telegram is trans-
mitted to the bus only when the status is changed by the actuator.
The cycle time is defined centrally for all the valve outputs on the parameter page
"General".
There is no cyclical transmission during an active time delay after bus voltage re-
turn or an ETS programming operation.
10.9 Short-circuit and overload detection
The actuator is able to detect an electrical overload or a short-circuit at the valve
outputs and to protect them against destruction by switching off. Outputs which
have experienced a short-circuit or a constant load are deactivated after an identi-
fication period. Optionally, in this case short-circuit/overload signals can be trans-
mitted via separate 1-bit communication objects.
Short-circuit / overload detection is always active when a valve output is switched
on (output energised) and always occurs in two output groups. Here, outputs 1 to 3
and outputs 4 to 6 each form a group. If there is an error, the actuator will only de-
tect an overload / a short-circuit in a group at first. Therefore, the actuator then ex-
ecutes a special testing cycle, which guarantees safe detection of the valve outputs
which are actually electrically overloaded. Only after overloaded or short-circuited
valve outputs have been accurately determined is it possible to output overload/
short-circuit signals to the bus. After error detection in a group, all the outputs in
this group are immediately deactivated for 6 minutes (switch-off idle phase / out-
puts not energised). During this time, the error detection circuit resets thermally.

SpaceLogic KNX Valve Drive Controller Short-circuit and overload detection
93 | MTN6730-0002 11.08.2020
The status LEDs ŋA1-A3 or ŋA4-A6 on the front panel of the device flash slowly
during the time of an overload or short-circuit identification (1 Hz) to signalise that
the output groups are temporarily deactivated. The LEDs flash quickly when the
actuator has safely identified all or individual valve outputs of the affected group as
overloaded or having short-circuited.
Testing cycle
During the testing cycle, the actuator applies stepped, time-offset switch-on and
deactivation of each valve output of the affected group to determine the outputs
which are overloaded or shorted and which thus led to the error switch-off. In the
case of a weak overload at, for example, one valve output, it may occur during the
testing cycle that, during the individual testing of the output during the switch-on
phase, no overload is detected, as the overload is too slight. This means that it
may be necessary to start multiple testing cycles, until the overloaded output can
be identified clearly. Each output group is equipped with a meter, which saves the
number of testing cycles started for a group up to that point. Each time it is not pos-
sible to determine clearly if a valve output is overloaded or short-circuited during a
testing cycle, then the counter will meter upwards by one increment. If another er-
ror is detected in an output group unsuccessfully tested for overload / short-circuit
(meter reading > "0"), then the outputs will be energised with a longer switch-on
time in the new testing cycle. In the first testing cycle, the switch-on time is
1 second, in the 2nd cycle 10 seconds, in the 3rd cycle 1 minute and, in the 4th
cycle, 4 minutes.
The meter reading is only saved in the device and cannot be read out.
If there is a collective overload, various weak overloads, possibly at multiple out-
puts, have collected into a stronger overall overload. If there is a collective over-
load, it may occur that, even after four testing cycles, no output can be clearly iden-
tified as overloaded. In this case, after the fourth cycle, the actuator will deactivate
individual valve outputs of an output group, until no overload exists.
Here is the testing cycle for the identification of overloaded or short-circuited valve
outputs in detail...
– 1.
An overload or short-circuit was detected in a group. The actuator deactiv-
ates all the valve outputs of the affected group. The switch-off idle phase (6
minutes) is started.
– 2.
The first valve output of the affected group (output 1 or output 4) switches
on for approx. 1 second, if this output was not previously deactivated by a
previous testing cycle. If the output was previously deactivated, then the ac-
tuator switches the next output on (output 2 or output 4, etc.).
– 2. a
If, during the switch-on time, no overload or no short-circuit is detected be-
cause the overload / the short-circuit is pending at another output or is too
slight (weak overload), then the output will be switched off again. Continue
with Step 3.
– 2. b
If, at the tested valve output, an overload or a short-circuit is detected, then
a forced switch-off takes place immediately at this output. The output is de-
activated. Then a switch-off idle phase of 6 minutes is started, during which
the error detection circuit resets thermally. During this time, the affected out-
put group remains completely switched off.
SpaceLogic KNX Valve Drive Controller Short-circuit and overload detection
94 | MTN6730-0002 11.08.2020
– 3.
The output test started under Step 2 is continued with the next output, which
has not been deactivated, in the appropriate group in the same fashion, with
a time gap of approx. 4 seconds from output test to output test, until the last
valve output of the group or both groups has been processed.
– 4.
The testing cycle is then finally exited when all the valve outputs or both
groups have been processed.
– 4. a
The valve outputs detected as overloaded or having shorted in the testing
cycle of the group(s) now remain deactivated and cannot be switched on
again until the reset. The testing cycle counter is deleted. All the unaffected
valve outputs are again activated normally.
– 4. b
If, during the testing cycle, no output was detected as being overloaded or
having shorted (probable weaker overload), then the testing cycle counter
for this/these group(s) will count upwards, so that, in the next cycle, all the
affected valve outputs are tested with an extended switch-on time, in order
to detect weaker overloads.
Exception: If the previously executed testing operation was the 4th se-
quence in succession without any error detection, then the actuator will as-
sume that this is a collective overload at multiple outputs. In this case, the
actuator will automatically deactivate one output of the affected group (out-
put 3 or output 6), according to the priority. In so doing, the testing cycle
counter will be deleted as for regular identification of an error, and testing
again occurs with a 1 s switch-on time in the next cycle. If 4 cycles again oc-
cur after this, without outputs being detected as overloaded or having shor-
ted during the individual test, then the actuator will again assume a collect-
ive overload and will automatically permanently deactivate the next outputs
of the group(s) (firstly output 2 and/or output 5, then, after four more cycles,
output 1 and/or output 4).
– 5.
All the valve outputs not deactivated in the testing cycles then continue to
work normally.
If possible, connect actuators for environments with increased fail-safety require-
ments to the outputs 1 and 4. During overload detection, these are switched off
last, as described.
Signal telegrams, if configured for a valve output in the ETS, are only generated for
those valve outputs which were forcibly deactivated by priority in the testing cycle,
after the detection of an error or a collective overload.
The resetting of an overload or a short-circuit during a testing cycle is ignored.
To give less weight to detected overloads caused by rare, extreme interference,
such as strong electromagnetic coupling into the low-voltage network (lightning
strike close by), the cycle counter is reduced by 1 after a period of 28 days without
the detection of a further overload or a new short-circuit. This ensures that, after
long periods of time, valve outputs are not simply switched off after the 4th cycle
without identification of a clear overload or a short circuit.
A valve output switched off via the bus (output not energised) can also be ener-
gised during the overload or short-circuit detection phase for the period of time
defined in the testing cycle.
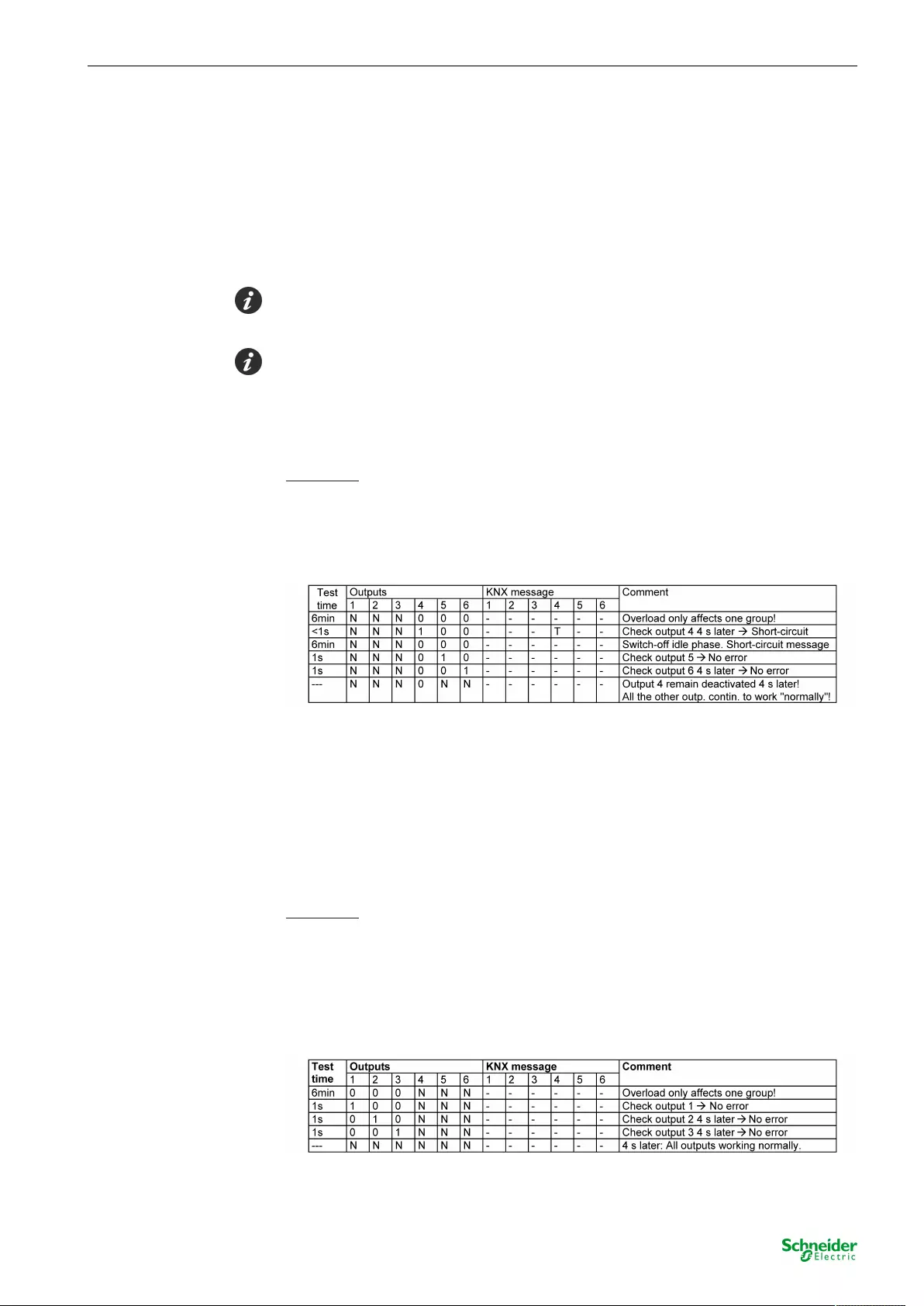
SpaceLogic KNX Valve Drive Controller Short-circuit and overload detection
95 | MTN6730-0002 11.08.2020
A short circuit or an overload influences the command value status of the valve
outputs of an output group. Even at the beginning of a short-circuit / overload iden-
tification phase, the actuator will set the command value status, according to the
valve direction of action, either to "OFF" / "0 %" (for deenergised closed) or to
"ON" / "100 %" (for deenergised opened). This valve status remains intact during
the entire length of the identification phase and for valve outputs identified as hav-
ing short circuited or being overloaded. Energisation phases during the testing
cycles do not influence the command value status.
The command value status contained in the combined valve status is not influ-
enced by a short-circuit or an overload.
A valve output affected by a short-circuit / overload (valve completely closed on
deenergised closed or completely opened on deenergised opened) does not influ-
ence the evaluation of the calculation of the "Largest command value" or the heat
requirement and pump control.
Examples of overload / short-circuit detection...
Example 1
Error case = Short-circuit at valve output 4.
A short-circuit generates a short-circuit/overload signal in output group A4...A6.
This produces the following sequence...
Image21: Short-circuit at valve output 4
"0" Output not energised
"1" Output energised
"N" Normal operation of the valve output
"T" Short-circuit / overload identified (signal telegram is cancelled if con-
figured)
On next error detection in group 4-6: Test switch-on time: 10 s
Example 2
Error case = Weak overload at valve output 2.
The overload is so weak that a switch-on time of 1 second does not lead to error
detection. In the case of a weak overload, it should be expected that the overload/
short-circuit signal only affects the directly affected output group (here: Outputs 1
to 3). This produces the following sequence...
Image22: Weak overload at valve output 2 / first testing cycle
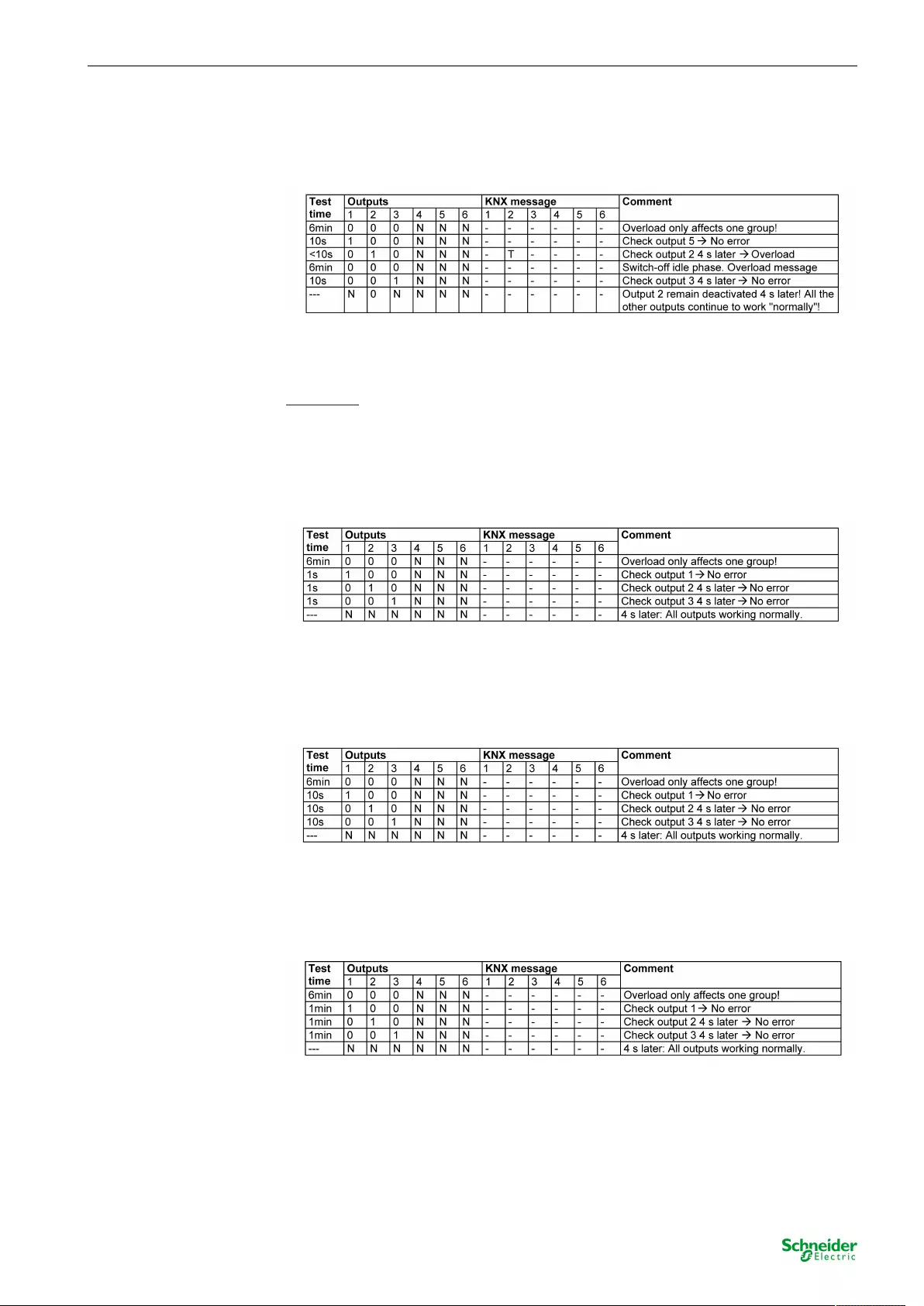
SpaceLogic KNX Valve Drive Controller Short-circuit and overload detection
96 | MTN6730-0002 11.08.2020
On next error detection in group 1...3: Test switch-on time: 10 s
It should be expected that, in normal operation, an overload will again be detected
in the previously affected output group...
Image23: Weak overload at valve output 2 / second testing cycle
On next error detection in group 1...3: Test switch-on time: 1 s
Example 3
Error = Total overload in output group "Output 1 to 3".
The overload of individual valve outputs is so weak that, during the testing cycles,
no output can be clearly identified as overloaded or having shorted during a test
switch-on time of 4 minutes. This produces the following sequence...
Image24: Total overload in output group 1...3 / first testing cycle
On next error detection in group 1...3: Test switch-on time: 10 s
It should be expected that, in normal operation, an overload will again be detected
in the previously affected output group...
Image25: Total overload in output group 1...3 / second testing cycle
On next error detection in group 1...3: Test switch-on time: 1 min.
It should be expected that, in normal operation, an overload will again be detected
in the previously affected output group...
Image26: Total overload in output group 1...3 / third testing cycle
On next error detection in group 1...3: Test switch-on time: 4 min.
It should be expected that, in normal operation, an overload will again be detected
in the previously affected output group...
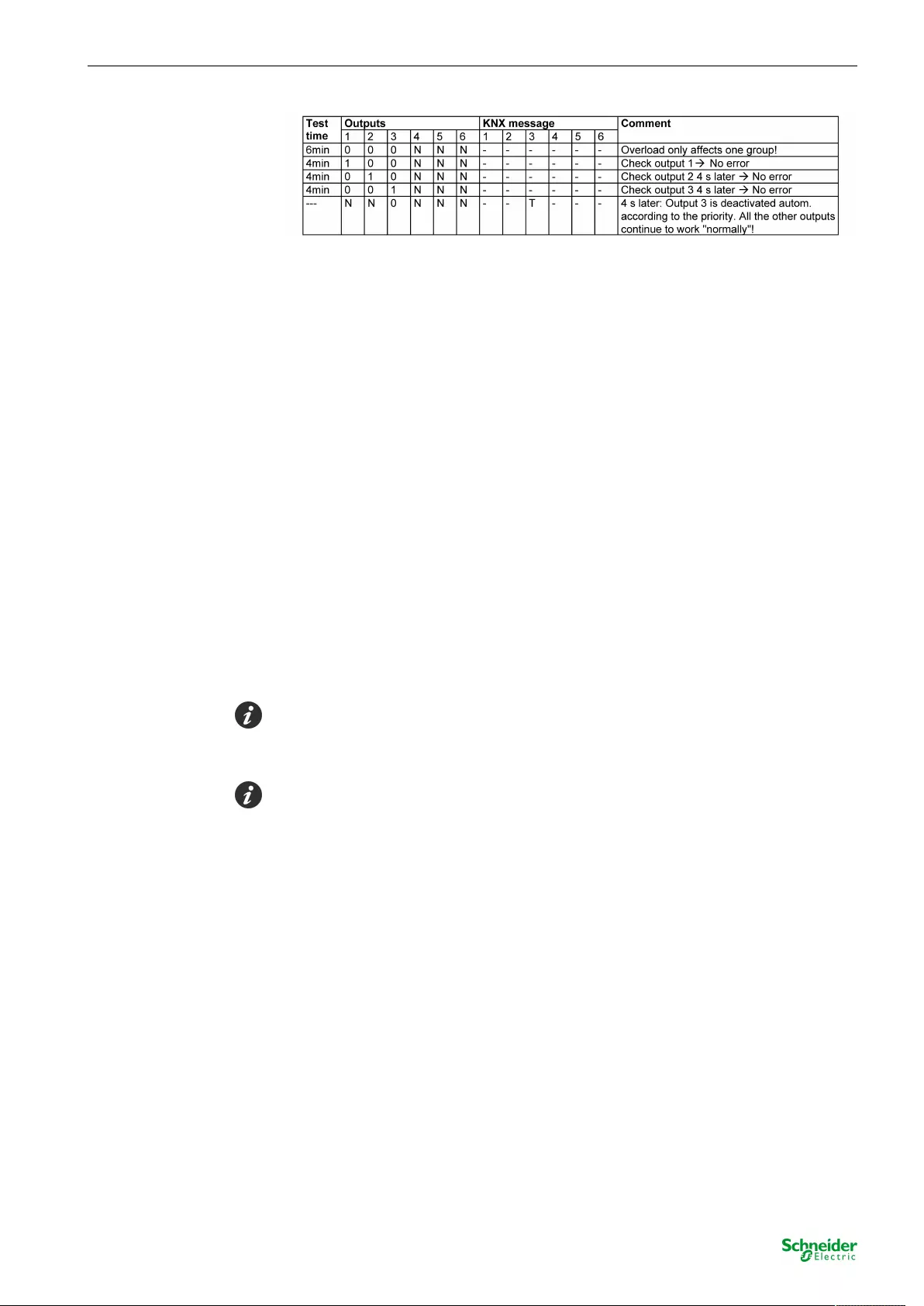
SpaceLogic KNX Valve Drive Controller Short-circuit and overload detection
97 | MTN6730-0002 11.08.2020
Image27: Total overload in output group 1...3 / fourth testing cycle
On next error detection in group 1-3: Test switch-on time: 1 s
Short-circuit / overload signal telegrams
Signal telegrams, are only transmitted for the outputs which were deactivated by
priority in the testing cycle, after the detection of an error or a collective overload.
The precondition is that the signal telegram on the parameter page "Ax - Command
value/Status/Operating mode" is enabled by the "Short-circuit / overload signal ?"
parameter in the "Yes" setting. The telegram polarity of the signal telegram can be
configured.
An active short-circuit / overload signal remains intact after a device reset by bus
voltage return. In this case as well, the short-circuit / overload signal must first be
reset (see "Resetting a short-circuit / overload" below). If, before the bus/mains
voltage failure, no short-circuit and no overload was identified, then the actuator
will first transmit a signal telegram "No short-circuit / no overload" after bus voltage
return. Should, after bus/mains voltage return, a short-circuit or an overload occur,
then the actuator will start a new identification phase.
After an ETS programming operation, short-circuit / overload signals are always
deactivated. Here, in the case of shorted or overloaded valve outputs, the actuator
will first perform an identification phase again, in order to detect faulty valve out-
puts.
The object always transmits the current status after bus voltage return and an ETS
programming operation after a delay, providing that a delay after bus voltage return
has been configured on the "General" parameter page.
The states "Short-circuit" and "Overload" are also fed back in the combined valve
status (siehe Kapitel "Status functions" } Page 90).
Resetting a short-circuit / overload
Valve outputs, identified as having shorted or being overloaded, are detected by
the actuator. In this case, affected valve outputs can no longer be activated by any
functions of the actuator. The cause of the error must be eliminated and the "Short-
circuit / overload" state also be reset, so that the outputs can be activated again.
There are two alternative options for the recommissioning of one or more deactiv-
ated valve outputs...
– Global reset of all overload / short-circuit states:
All the overload / short-circuit states of the actuator can be reset jointly. For
this, the 1-bit communication object "Reset short-circuit / overload" is avail-
able, which can be enabled on the parameter page "Valve / pump", using
the "Global reset of all 'Short-circuit / overload' signals" parameter in the
"Yes" setting. As soon as the actuator receives a "1" telegram via this ob-
ject, all the overload / short-circuit states will be reset immediately. The ac-
tuator then deactivates the overload / short-circuit state of each valve output
and also retracts the overload / short-circuit signals. Should all or some of
the valve outputs still be shorted or overloaded at this time, then a new
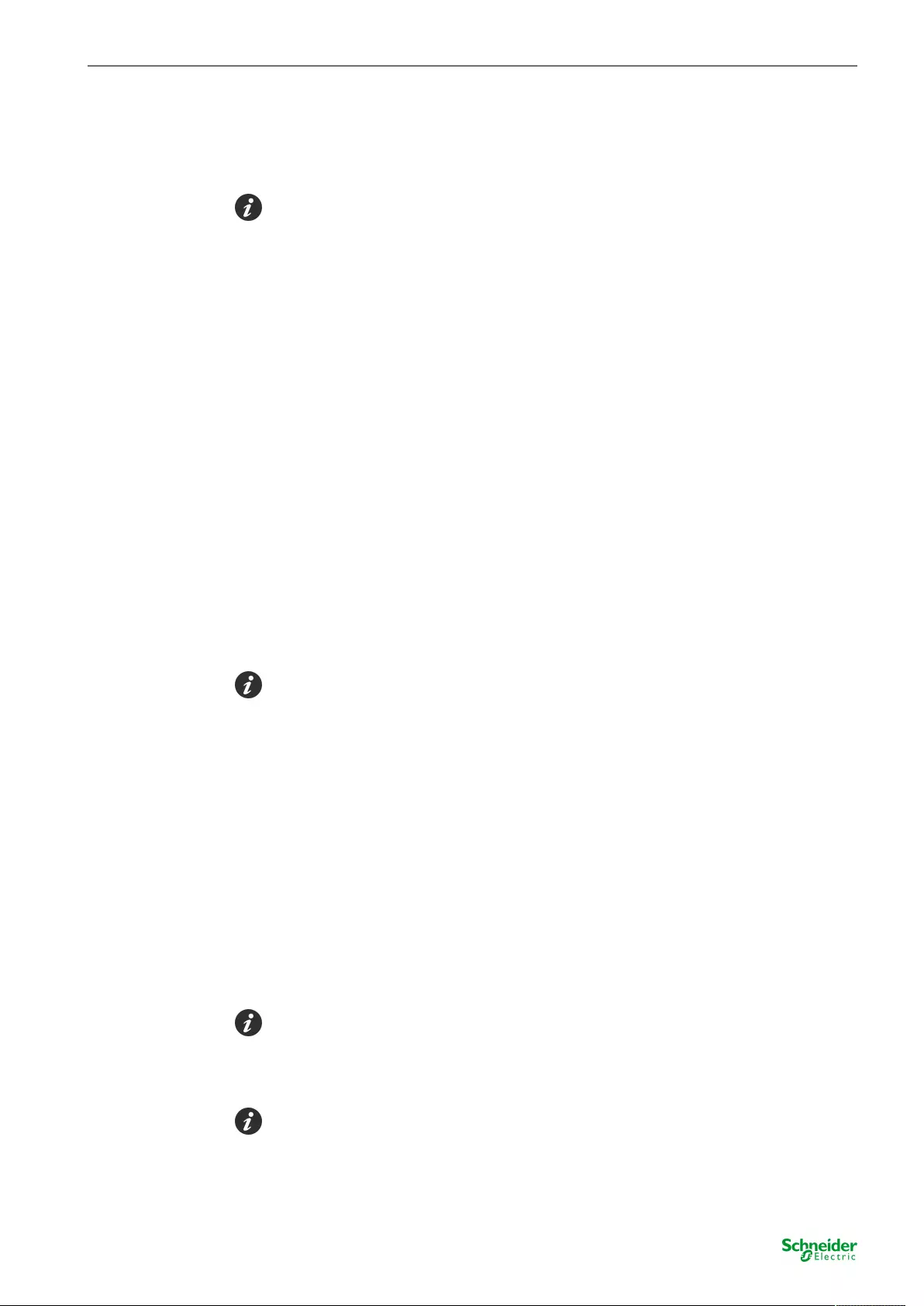
SpaceLogic KNX Valve Drive Controller Valve rinsing
98 | MTN6730-0002 11.08.2020
identification phase will begin.
A "0" telegram to the "Reset short-circuit / overload" object produces no re-
action.
The global resetting of an overload or a short-circuit during a testing cycle is always
ignored.
– Resetting by switching off the valve voltage supply:
Overload / short-circuit states can be reset by switching off the valve voltage
supply. The following procedure is required for this:
a) Switch-off of the valve voltage supply. After this, the actuator immediately
sends a signal telegram "Failure of operating voltage", provided that this
function is globally enabled in the ETS and the bus voltage is still switched
on. In addition, all the overload / short-circuit signals of the valve outputs are
reset immediately. If, at this time, no bus voltage is switched on, then the
actuator will reset the overload / short-circuit signals after the bus voltage is
switched on again.
b) Elimination of the cause of the overload / short-circuit
c) Switch-on of the valve voltage supply. The valves can then be activated
again normally. When the valve voltage supply is switched on, the actuator
also retracts the "Failure of operating voltage" signal, provided that this
function is globally enabled in the ETS.
d) Should all or some of the valve outputs still be shorted or overloaded
after the return of the valve voltage supply, then a new identification phase
will begin.
Switching off the valve voltage during a testing cycle only causes a reset of existing
overload / short-circuit signals. The testing cycle is not cancelled.
10.10 Valve rinsing
To prevent calcification or sticking of a valve which has not been activated for
some time, the actuator has an automatic valve rinsing function. Valve rinsing can
be executed cyclically or using a bus command, causing the activated valves to run
through the full valve stroke for a preset period of time. During valve rinsing, the
actuator activates a command value of 100 % without interruption for the affected
valve output for half of the configured "Valve rinsing time". For this, the valves open
completely. After half the time, the actuator switches to a command value of 0%,
causing the connected valves to close completely.
If necessary, the intelligent valve rinsing can be enabled. In so doing, cyclical rins-
ing using the full stroke is only executed when a defined minimum command value
limiting value was not exceeded during actuator operation.
During valve rinsing, the actuator executes the command values "1" (corresponds
to "100 %" - open completely) and "0" (corresponds to "0 %" - close completely) for
valve outputs configured with a command value limiting value for the data formats
"Switching (1-bit)" or "Constant (1-byte)".
The actuator takes the valve direction of action configured in the ETS into account
in the electrical activation of the valve output.
At the end of valve rinsing, the actuator automatic sets the tracked command value
according to the priority control (siehe Kapitel "Priorities for valve outputs" } Page
31).
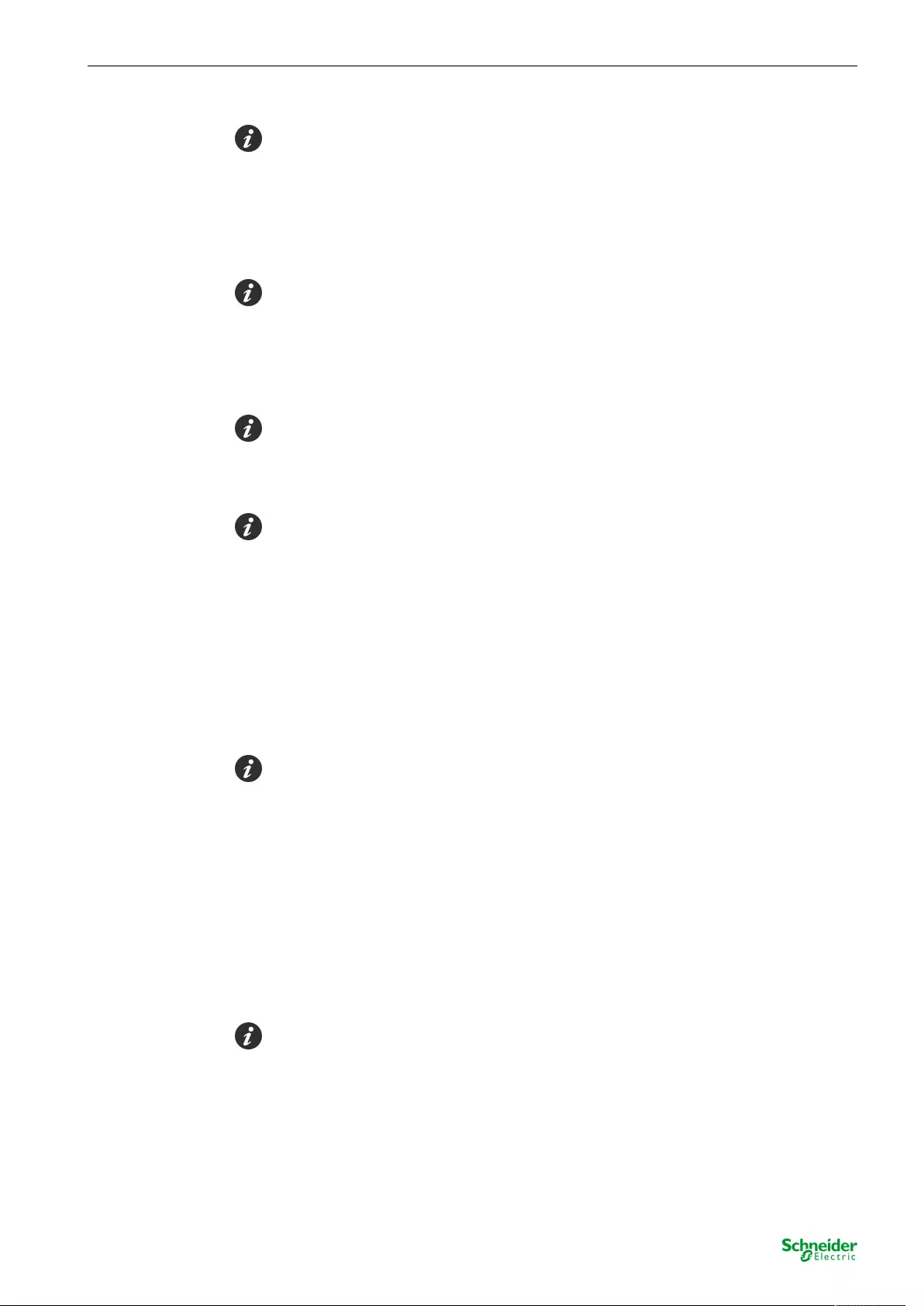
SpaceLogic KNX Valve Drive Controller Valve rinsing
99 | MTN6730-0002 11.08.2020
The actuator does not execute valve rinsing if a higher-priority function is active.
Nonetheless, the actuator internally starts the rinse length, as soon as the device
receives a command for valve rinsing (cyclically or via bus command). If, during an
active rinsing time, higher-priority functions are exited, then the actuator will ex-
ecute the remaining residual time of the rinse function. If the rinsing time continu-
ous to elapse during a function with a higher priority, then there is no residual time.
Thus, the actuator will not execute the previously started valve rinsing.
If the bus control of individual valve outputs is disabled as part of a permanent
manual operation, then the actuator will save the start commands of a valve rinsing
operation in the background. In this case, the actuator will start the rinse time im-
mediately after the lifting of the disabling function. If, after this, the manual opera-
tion is exited after the rinse time has started (and no other higher-priority functions
are active), then the actuator will also execute valve rinsing actively.
The actuator also executes valve rinsing by starting the rinse time, even if the valve
power supply has been switched off. A bus voltage failure immediately interrupts an
active rinsing operation. When the bus/mains voltage returns, a previously interrup-
ted rinsing operation is not executed again.
Valve rinsing influences the status feedback of the active command value.
Valve rinsing possesses a separate 1-bit status object. Optionally, this object can
be used, for example, to display a KNX visualisation that valve rinsing is taking
place (rinse operation time running). The status telegram can be used, for ex-
ample, to disable a KNX room temperature controller for the length of the valve
rinsing. Particularly in the case of long rinsing times, the disabling of the room tem-
perature controller, possibly in combination with the disabling of the controller oper-
ation, can make a positive contribution to the suppression of the oscillation beha-
viour of the controller.
The telegram polarity of the status object is fixed: "0" = Valve rinsing inactive, "1" =
Valve rinsing active.
The object transmits the current status after bus and mains voltage return and after
an ETS programming operation without a delay.
Enabling valve rinsing
Valve rinsing can only be used if it has been enabled in the ETS.
■ Set the "Use 'Valve rinsing' function ?" parameter on the parameter page
"Ax - Valve rinsing" to "Yes". In the "Valve rinsing time" parameter, config-
ure for how long the rinse function (100 % -> 0 %) is to be executed.
Valve rinsing is enabled. Additional parameters become visible in the ETS,
presetting whether the valve rinsing is to be activated cyclically and / or with
bus control.
Set the length of the valve rinsing to the adjustment cycle time of the electrothermal
actuators in such a way that they open and close completely. This is usually guar-
anteed by configuring the rinsing length to double the adjustment cycle time.
■ Set the "Use 'Valve rinsing' function ?" parameter to "no".
Valve rinsing is not available.
SpaceLogic KNX Valve Drive Controller Valve rinsing
100 | MTN6730-0002 11.08.2020
Configuring cyclical valve rinsing
The actuator can perform valve rinsing cyclically, if necessary. When using the cyc-
lical valve rinsing, a rinse operation can be started automatically after a configur-
able cycle time (1...26 weeks). Here too, the valve rinsing length configured in the
ETS defines the time for the once-only, complete opening and closing of the activ-
ated valve drives. At the end of a rinsing operation, the actuator always restarts the
cycle time.
Valve rinsing must be enabled and a valid rinsing time configured.
■ Set the "Activate cyclical valve rinsing ?" parameter to "yes". In the case of
the "Cycle time" parameter, configure how often valve rinsing is to be per-
formed automatically.
Cyclical valve rinsing is enabled.
■ Set the "Activate cyclical valve rinsing ?" parameter to "no".
Cyclical valve rinsing is completely disabled. Valve rinsing can only be star-
ted by the communication object (if enabled).
Each ETS programming operation resets the cycle time. The first rinsing operation
with cyclical valve rinsing takes place after an ETS programming operation after the
first time cycle has elapsed.
If there is a bus voltage failure, the actuator saves the remaining residual time of
the current time cycle. The residual cycle time is restarted after bus voltage return.
A bus voltage failure immediately interrupts an active rinsing operation. When the
bus/mains voltage returns, a previously interrupted rinsing operation is not ex-
ecuted again. The actuator then starts a new time cycle for cyclical valve rinsing.
Optionally, intelligent cyclical valve rinsing can be additionally activated. Here,
valve rinsing is only executed repeatedly, if, in the current time cycle, a minimum
command value limiting value, configurable in the ETS, was not exceeded. It the
active command value exceeds the limiting value, then the actuator will stop the
cycle time. The actuator only restarts the cycle time if, in the further course of the
command value change, a command value of "0 %" or "OFF" (completely closed)
is set (see figure 28). This prevents valve rinsing if the valve has already run
through a sufficiently defined stroke.
If, after exceeding the configured limiting value, the value was not completely
closed at least once (command value "0 %" or "OFF"), then no further cyclical
valve rinsing will take place.
Use of the intelligent cyclical valve rinsing means that rinsing operations over the
entire valve stroke are only then used when this is sensible and actually required.
For example, in the summer months, the use of heating power is lower. In con-
sequence, the valves are activated less frequently by command values, meaning
that valve rinsing should be performed as anti-sticking protection. In the winter
months, it is frequent necessary to activate heating valves using normal command
value telegrams.
The intelligent valve rinsing ensures that no redundant valve rinsing is not per-
formed in the winter. In the summer, the intelligent control performs valve rinsing
cyclically.
The cycle time is always started after an ETS programming operation. This also oc-
curs when the active command value exceeds the configured limiting value after
the download.

SpaceLogic KNX Valve Drive Controller Valve rinsing
101 | MTN6730-0002 11.08.2020
The combination of intelligent valve rinsing with a command value limit with a min-
imum command value limiting value. If a minimum limiting value of the command
value limit exists, then the active command value of the affected valve output is
never "0 %". In consequence, the actuator would never restart the cycle time as
part of intelligent valve rinsing.
Image28: Example of a minimum command value limiting value for intelligent valve
rinsing
■ Set the "Use intelligent valve rinsing ?" parameter to "yes". Using the "Limit-
ing value minimum command value (10...100 %)" parameter, define the
command value limiting value.
Intelligent cyclical valve rinsing is activated. Valve rinsing is only executed
when the configured limiting value was exceeded at least once in the previ-
ous time cycle and, consequently, the valve was run to the "0 %" command
value.
■ Set the "Use intelligent valve rinsing ?" parameter to "no".
Intelligent cyclical valve rinsing is deactivated. Valve rinsing always takes
place as soon as the set cycle time has expired.
Valve rinsing can optionally be started and, if required, stopped using a communic-
ation object. If valve rinsing was started by the object, then the actuator will stop the
cycle time of the cyclical valve rinsing operation. The cycle time is only restarted
after the rinsing operation has been fully executed without interruption or a stop
command was received via the object.
Configuring bus-controlled valve rinsing via an object
If necessary, valve rinsing can be started and, optionally, stopped using its own 1-
bit communication object. This means that it is possible to activate a rinsing opera-
tion of the valve controlled by time or an event. It is also possible, for example, to
cascade multiple heating actuators, so that they perform valve rinsing simultan-
eously (link of the individual status objects to the input objects of the valve rinsing).
Bus control can only be used if it has been enabled in the ETS.
Valve rinsing must be enabled and a valid rinsing time configured.
SpaceLogic KNX Valve Drive Controller Operating hours counter
102 | MTN6730-0002 11.08.2020
■ Set the "Valve rinsing activated externally ?" parameter to "yes". In the case
of the parameter "Polarity of 'Start / stop valve rinsing' object", configure the
telegram polarity, thus presetting whether the bus-controlled starting and
stopping, or, alternatively, only starting, should be possible.
Bus-controlled valve rinsing is enabled. The communication object is visible.
The name of the object is aligned to the setting of the permitted telegram
polarity ("Start / stop valve rinsing" or "Start valve rinsing"). When a start
command is received, the actuator immediately starts the configured time
for a rinsing operation. The actuator also actively executes valve rinsing if
no higher-priority function is active. If bus-controlled stopping is permitted,
then the actuator will also react to stop commands by immediately interrupt-
ing running rinsing operations.
■ Set the "Valve rinsing activated externally ?" parameter to "no".
Bus-controlled valve rinsing is not available. Valve rinsing can only take
place cyclically.
Updates of the object from "Start" to "Start" or "Stop" to "Stop" do not produce a re-
action. The length of an elapsing valve rinsing operation or the cycle time of a cyc-
lical valve rinsing operation are not restarted by this.
Bus-controlled valve rinsing via the object can be combined with a cyclical valve
rinsing operation. If valve rinsing was started by the object, then the actuator will
stop the cycle time of the cyclical valve rinsing operation. The cycle time is only re-
started after the rinsing operation has been fully executed without interruption or a
stop command was received via the object.
10.11 Operating hours counter
The operating hours counter determines the switch-on time of a valve output. For
the operating hours counter, an output is actively on, when it is energised, i.e.
when the status LED on the front panel of the device. As a result, the operating
hours counter determines the time during which deenergised closed valves are
opened or deenergised opened valves are closed.
The operating hours counter adds up the determined switch-on time accurately to
the minute for energised valve outputs in full hours respectively (see figure 29).
The totalled operating hours are added in a 2-byte meter and stored permanently
in the device. The current meter reading can be transmitted cyclically to the bus by
the "value operating hours counter" communication object or when there is a
change in an interval value.
During pulse width modulation (PWM) at a valve output, the operating hours
counter only evaluates the switch-on time of the PWM signal.
Image29: Function of the operating hours counter (using the example of an up-
counter)
SpaceLogic KNX Valve Drive Controller Operating hours counter
103 | MTN6730-0002 11.08.2020
In the as-delivered state, the operating hour values of all valve outputs of the actu-
ator is "0". If the operating hours counter is not enabled in the configuration of an
output, no operating hours will be counted for the valve concerned. Once the oper-
ating hours counter is enabled, however, the operating hours will be determined
and added up by the ETS immediately after commissioning the actuator.
If the operating hours counter is subsequently disabled again in the parameters
and the actuator is programmed with this disabling function, all the operating hours
previously counted for the valve output concerned will be deleted. When enabled
again, the meter reading of the operating hours counter is always on "0 h".
The operating hours values (full hours) stored in the device will not be lost in case
of a bus and mains voltage failure or by an ETS programming operation. Any
summed up operating minutes (full hour not yet reached) will be rejected in this
case, however.
After bus voltage return or after an ETS download, the actuator passively updates
the "Value operating hours counter" communication object in each valve output.
The object value can be read out if the read-flag is set. The object value, depend-
ing on the configuration for the automatic transmission, is actively transmitted if ne-
cessary to the bus, once the configured transmission delay has elapsed after bus
voltage return.
The operating hours counter detects any operation of the valve outputs by the
manual operation, which means that switching on an output also activates the
counting of operating hours and the manual switch-off interrupts a counting opera-
tion.
No operating hours are counted if the supply voltage of the valves is not switched
on.
If only the mains voltage supply of the actuator and the valve voltage are switched
on (bus voltage switched off / construction site mode), summed-up operating hours
will not be stored in the event of a mains voltage failure!
Activating the operating hours counter
The operating hours counter only counts the operating hours of a valve output if it
was activated in the ETS.
■ On the parameter page "Ax - Operating hours counter", set the "Use operat-
ing hours counter ?" parameter to "yes".
The operating hours counter is activated.
■ On the parameter page "Ax - Operating hours counter", set the "Use operat-
ing hours counter ?" parameter to "no".
The operating hours counter is deactivated.
Deactivation of the operating hours counter and subsequent programming with the
ETS resets the counter status to "0".
Setting type of counter of the operating hours counter
The operating hours counter can optionally be configured as an up-counter or
down-counter. Depending on this type of counter, a limit or start value can be set
optionally, whereby, for example, the operating time of an actuator can be mon-
itored by restricting the counter range.
Up-counter:
After activating the operating hours counter by enabling in the ETS or by restarting,
the operating hours are counted starting at "0". A maximum of 65535 hours can be
counted, after that the meter stops and signals a counter operation via the "Operat-
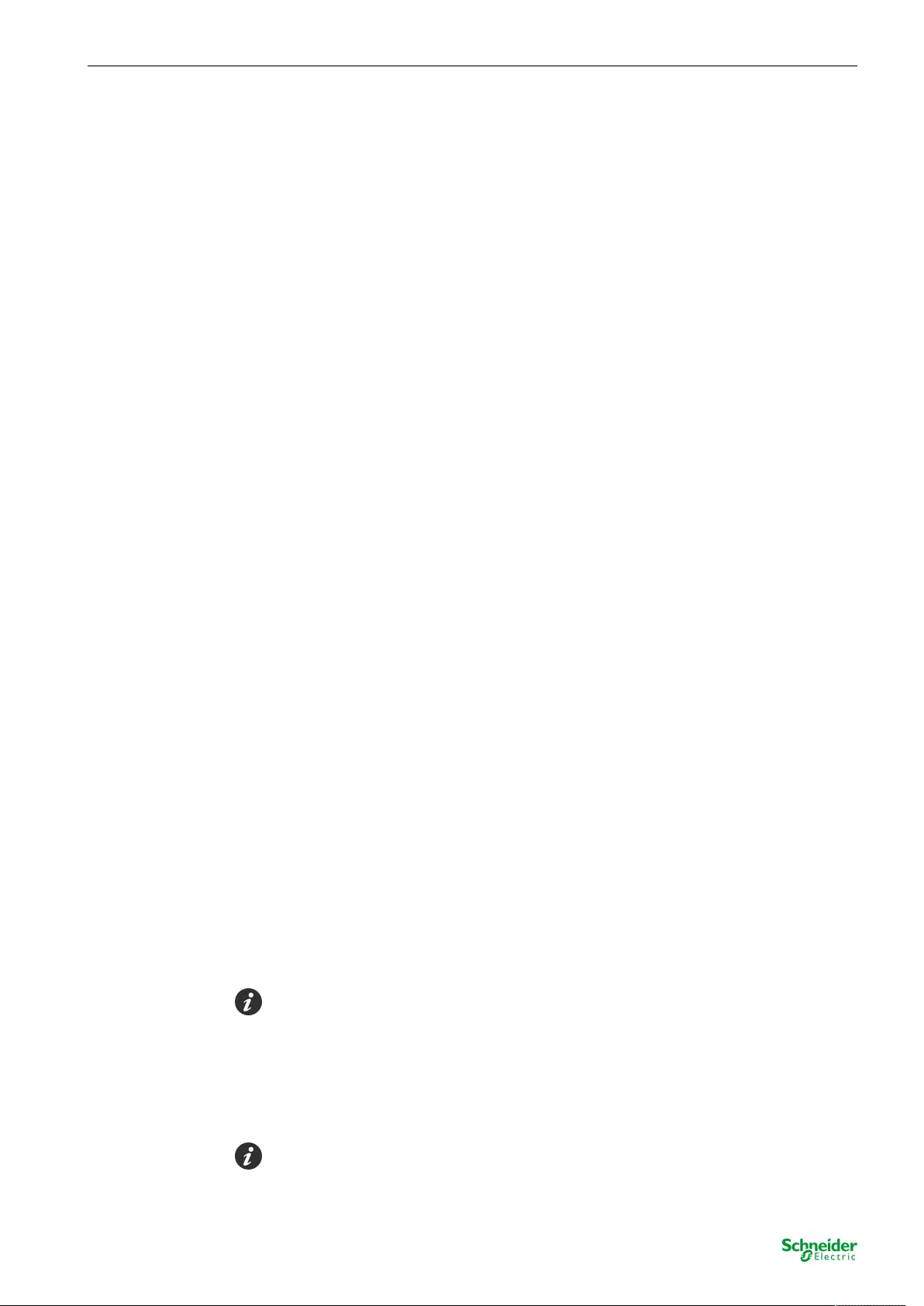
SpaceLogic KNX Valve Drive Controller Operating hours counter
104 | MTN6730-0002 11.08.2020
ing hours count. elapsed" object.
A limiting value can be set optionally in the ETS or can be predefined via the com-
munication object "Limiting value operating hours counter". In this case, the
counter operation is signalled to the bus via the "Operating hours count. elapsed"
object if the limiting value is reached, but the meter continues counting - if it is not
restarted - up to the maximum value 65535 and then stops. Only a restart initiates
a new counting operation.
Down-counter:
After enabling the operating hours counter in the ETS, the meter reading is on "0 h"
and the actuator signals a counter operation for the output concerned after the pro-
gramming operation or after bus voltage return via the "Operating hours count.
elapsed" object. Only after a restart is the down-counter set to the maximum value
65535 the counting operation started.
A start value can be set optionally in the ETS or can be predefined via the commu-
nication object "start value operating hours counter". If a start value is set, the
down-counter is initialised with this value instead of the maximum value after a re-
start. The meter then counts the start value downwards by the hour. When the
down-counter reaches the value "0", the counter operation is signalled to the bus
via the "Operating hours count. elapsed" and the counting is stopped. Only a re-
start initiates a new counting operation.
The use of the operating hours counter must be set on the parameter page "Ax –
Operating hours counter".
■ Set the parameter "Counter type" to "Up-counter". Set the parameter "Limit-
ing value specification?" to "yes, as parameter" or "yes, as received via ob-
ject" if it is necessary to monitor the limiting value. Otherwise, reset the
parameter to "no". In the "Yes, as specified in parameter" setting, specify
the required limit value (1…65535h).
The meter counts the operating hours forwards starting from "0 h". If the
monitoring of the limiting value is activated, the actuator transmits a "1" tele-
gram via the object "Operating hours count. elapsed" for the valve output
concerned once the predefined limiting value is reached. Otherwise, the
counter operation is first transmitted when the maximum value 65535 is
reached.
■ Set the parameter "Counter type" to "Down-counter". Set the parameter
"start value preset ?" to "yes, as parameter" or "yes, as received via object"
if a start value preset is necessary. Otherwise, reset the parameter to "no".
In the "yes, as specified in parameter" setting, specify the required start
value (1…65535h).
The meter counts the operating hours down to "0 h" after a restart. With a
start value preset, the start value is counted down, otherwise the counting
operation starts at the maximum value 65535. The actuator transmits a "1"-
telegram via the object "Operating hours count. elapsed" for the output con-
cerned once the value "0" is reached.
The value of the communication object "Operating hours count. elapsed" is stored
permanently. The object is initialised immediately with the value that was saved be-
fore bus voltage return or ETS programming. If an operating hours counter is in this
case identified as having elapsed, i.e. if the object value is a "1", an additional tele-
gram will be actively transmitted to the bus. If the counter has not yet elapsed (ob-
ject value "0"), no telegram is transmitted on return of bus voltage or after an ETS
programming operation.
With a limiting or start value preset via object: The values received via the object
are first validly accepted and permanently saved internally after a restart of the op-
erating hours counter. The object is initialised immediately with the value that was
last saved before bus voltage return or ETS programming. The values received will
SpaceLogic KNX Valve Drive Controller Operating hours counter
105 | MTN6730-0002 11.08.2020
be lost in the case of a bus voltage failure or by an ETS download if no counter re-
start was executed before. For this reason, when specifying a new start or limiting
value it is advisable to always execute a counter restart afterwards as well.
A standard value of 65535 is predefined provided that no limiting value or start
value has been received yet via the object. The values received and stored via the
object are reset to the standard value if the operating hours counter is disabled in
the parameters of the ETS and a ETS download is being performed.
With a limiting or start value predefined via object: If the start or limiting value is
predefined with "0", the actuator will ignore a counter restart to avoid an undesired
reset (e.g. in site operation -> hours already counted by manual operation).
If the counter direction of an operating hours counter is reversed by reconfiguration
in the ETS, a restart of the meter should always be performed after programming
the actuator so that the meter is reinitialised.
Restarting the operating hours counter
The current counter status of the operating hours can be reset at any time by the
communication object "Reset operating hours counter". The polarity of the reset
telegram is predefined: "1" = Restart / "0" = No reaction.
■ Characterise the communication object "Reset operating hours counter"
with "1".
In the up-counter the meter is initialised with the value "0" after a restart and
in the down-counter initialised with the start value. If no start value was con-
figured or predefined by the object, the start value is preset to 65535.
During every counter restart, the initialised meter reading is transmitted act-
ively to the bus. After a restart, the signal of a counter operation is also re-
set. At the same time, a "0" telegram is transmitted to the bus via the object
"Operating hours count. elapsed
In addition, the limiting or start value is initialised.
If a new limiting or start value was predefined via the communication object, a
counter restart should always be performed afterwards, too. Otherwise, the values
received will be lost in the case of a bus voltage failure or by an ETS download.
If a start or limiting value is predefined with "0", there are different behaviours after
a restart, depending on the principle of the value definition...
Preset as parameter:
The counter elapses immediately after a counter restart.
Preset via object:
A counter restart will be ignored to avoid an undesired reset (e.g. after installation
of the devices with hours already being counted by manual operation). A limiting or
start value greater than "0" must be predefined in order to perform the restart.
Transmission behaviour of the operating hours
counter
The current value of the operating hours counter is always tracked in the commu-
nication object "value operating hours counter". After bus voltage return or after an
ETS download, the actuator passively updates the "Value operating hours counter"
communication object in each valve output. The object value can be read out if the
read-flag is set.
In addition, the transmission behaviour of this communication object can be set.
The use of the operating hours counter must be set on the parameter page "Ax –
Operating hours counter".
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
106 | MTN6730-0002 11.08.2020
■ Set the parameter "Automatic transmission of numeric value" on parameter
page "Ax - Operating hours counter" to "After change by interval value". Set
the "Counting value interval (1…65535h)" to the desired value.
The meter reading is transmitted to the bus as soon as it changes by the
predefined counting value interval. After bus and mains voltage return or
after programming in the ETS, the object value is transmitted automatically
and immediately if the current meter reading or a multiple of this corres-
ponds to the counting value interval. A counter status "0" is always transmit-
ted in this case.
The object value is not transmitted if there is solely bus voltage return
(mains voltage supply of the actuator available without interruption).
■ Set the parameter "Automatic transmission of counting value" to "Cyclical".
The counter value is transmitted cyclically. The cycle time is defined on the
parameter page "General". After bus and mains voltage return or an ETS
programming operation, the meter reading is transmitted to the bus after the
configured cycle time has elapsed.
10.12 Parameter for valve outputs
Valve in voltage-free state (Valve direc-
tion of action)
closed
open
Valve drives that are closed or open when deenergised can be connected. On
each electrical activation of the valve outputs, the actuator takes the valve direc-
tion of action configured here into account, so that the command value presettings
(Valve closed OFF, 0 % / Valve opened ON, 1...100 %) can be executed in the
correct direction of action. The valve outputs are no longer energised if the valve
voltage supply fails or if there is a short-circuit or overload. The actuator takes this
state into account and also influences the command value feedback, according to
the configured valve direction of action.
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
107 | MTN6730-0002 11.08.2020
Behaviour in case of bus voltage failure no change
Specify command value
Activating command as for forced posi-
tion
Activating command as for emergency
operation
If there is a bus voltage failure, the valve outputs perform the configured reaction
at this point.
No change: The command value active before the bus voltage failure remains un-
changed.
Specify command value: The actuator sets the command value preset in the ETS
for the valve output by the parameter "Command value on bus voltage failure".
Activating command as for forced position: For the valve output, the actuator polls
the command value preset for the forced position, as configured in the ETS. Here,
the active operating mode (summer / winter) is taken into account, providing that a
summer / winter change-over is configured.
Ensure that, in this setting, the forced position function is not executed! The actu-
ator only polls the command value preset for the forced position.
Activating command as for emergency operation: For the valve output, the actu-
ator polls the emergency operation command value, as configured in the ETS.
Here, the active operating mode (summer / winter) is taken into account, providing
that a summer / winter change-over is configured.
Ensure that, in this setting, emergency operation is not executed (as would be the
case if there was a faulty command value found in the course of command value
monitoring)! The actuator only polls the command value preset for emergency op-
eration.
Command value in case of bus voltage
failure
0 %
5 %
10 %
...
90 %
95 %
100 %
The command value to be set on bus voltage failure is defined here. This para-
meter is only visible on "Behaviour in case of bus voltage failure" = "Preset com-
mand value".
For valve outputs configured in the ETS to the command value data formats
"Switching (1-bit)" or "Constant (1-byte) with command value limiting value", a
constant command value can also be preset using this parameter. In this case, a
pulse width modulation (5 % ... 95 %) is executed for the affected command value
outputs. In the "0 %" and "100 %" presettings, the valve outputs are activated con-
tinuously. The preset PWM remains active until other functions (manual operation,
short-circuit/overload) have been executed, which may override the constant com-
mand value on the valve output.
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
108 | MTN6730-0002 11.08.2020
Behaviour after bus or mains voltage re-
turn
Specify command value
Activating command as for forced posi-
tion
Activating command as for emergency
operation
Command value as before bus voltage
failure
After bus or mains voltage return, the valve outputs perform the configured reac-
tion at this point.
Specify command value: The actuator sets the command value preset for the
valve output by the parameter "Command value after bus or mains voltage return".
Activating command as for forced position: For the valve output, the actuator polls
the command value preset for the forced position, as configured in the ETS. Here,
the active operating mode (summer / winter) is taken into account, providing that a
summer / winter change-over is configured.
Ensure that, in this setting, the forced position function is not executed! The actu-
ator only polls the command value preset for the forced position.
Activating command as for emergency operation: For the valve output, the actu-
ator polls the emergency operation command value, as configured in the ETS.
Here, the active operating mode (summer / winter) is taken into account, providing
that a summer / winter change-over is configured.
Ensure that, in this setting, emergency operation is not executed (as would be the
case if there was a faulty command value found in the course of command value
monitoring)! The actuator only polls the command value preset for emergency op-
eration.
Command value as before bus voltage failure: After bus or mains voltage return,
that command value is set at the valve output which was active at the moment of
the last bus voltage failure. If there is a bus voltage failure, the actuator saves the
active command value internally in the device, so that the command value can be
restored when the device power supply returns. Saving only takes place after a
previous device reset (ETS programming operation, bus voltage return) when the
reset is longer than 30 seconds previously. Otherwise the actuator does not save
the current command value! In that case, an old value remains valid, as was previ-
ously saved by the actuator on the bus voltage failure.
If only the mains power supply fails, the actuator does not save the command
value.
Command value after bus or mains
voltage return
0 %
5 %
10 %
...
90 %
95 %
100 %
The command value to be set after bus or mains voltage return is defined here.
This parameter is only visible on "Behaviour in case of bus or mains voltage re-
turn" = "Preset command value".
For valve outputs configured in the ETS to the command value data formats
"Switching (1-bit)" or "Constant (1-byte) with command value limiting value", a
constant command value can also be preset using this parameter. In this case, a
pulse width modulation (5 % ... 95 %) is executed for the affected command value
outputs. In the "0 %" and "100 %" presettings, the valve outputs are activated con-
tinuously. The preset PWM remains active until other functions have been ex-
ecuted or a new command value telegram is received via the bus, overriding the
constant command value on the valve output.

SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
109 | MTN6730-0002 11.08.2020
Behaviour after ETS programming Behaviour as after bus voltage return
Specify command value
Activating command as for forced posi-
tion
Activating command as for emergency
operation
After an ETS programming operation, the valve outputs perform the configured re-
action at this point.
Behaviour as after bus voltage return: After an ETS programming operation, the
valve output will behaviour in the manner defined in the parameter "Behaviour
after bus or mains voltage return". If the behaviour there is configured to "Com-
mand value as before bus voltage failure", then that command value is also set
after an ETS programming operation which was active at the time of the last bus
voltage failure. An ETS programming operation does not overwrite the saved com-
mand value.
Specify command value: The actuator sets the command value preset for the
valve output by the parameter "Command value after ETS programming opera-
tion" in the ETS.
Activating command as for forced position: For the valve output, the actuator polls
the command value preset for the forced position, as configured in the ETS. Here,
the active operating mode (summer / winter) is taken into account, providing that a
summer / winter change-over is configured.
Ensure that, in this setting, the forced position function is not executed! The actu-
ator only polls the command value preset for the forced position.
Activating command as for emergency operation: For the valve output, the actu-
ator polls the emergency operation command value, as configured in the ETS.
Here, the active operating mode (summer / winter) is taken into account, providing
that a summer / winter change-over is configured.
Ensure that, in this setting, emergency operation is not executed (as would be the
case if there was a faulty command value found in the course of command value
monitoring)! The actuator only polls the command value preset for emergency op-
eration.
Command value after ETS programming 0 %
5 %
10 %
...
90 %
95 %
100 %
The command value to be set after an ETS programming operation is defined
here. This parameter is only visible on "Behaviour after ETS programming opera-
tion" = "Preset command value".
For valve outputs configured in the ETS to the command value data formats
"Switching (1-bit)" or "Constant (1-byte) with command value limiting value", a
constant command value can also be preset using this parameter. In this case, a
pulse width modulation (5 % ... 95 %) is executed for the affected command value
outputs. In the "0 %" and "100 %" presettings, the valve outputs are activated con-
tinuously. The preset PWM remains active until other functions have been ex-
ecuted or a new command value telegram is received via the bus, overriding the
constant command value on the valve output.
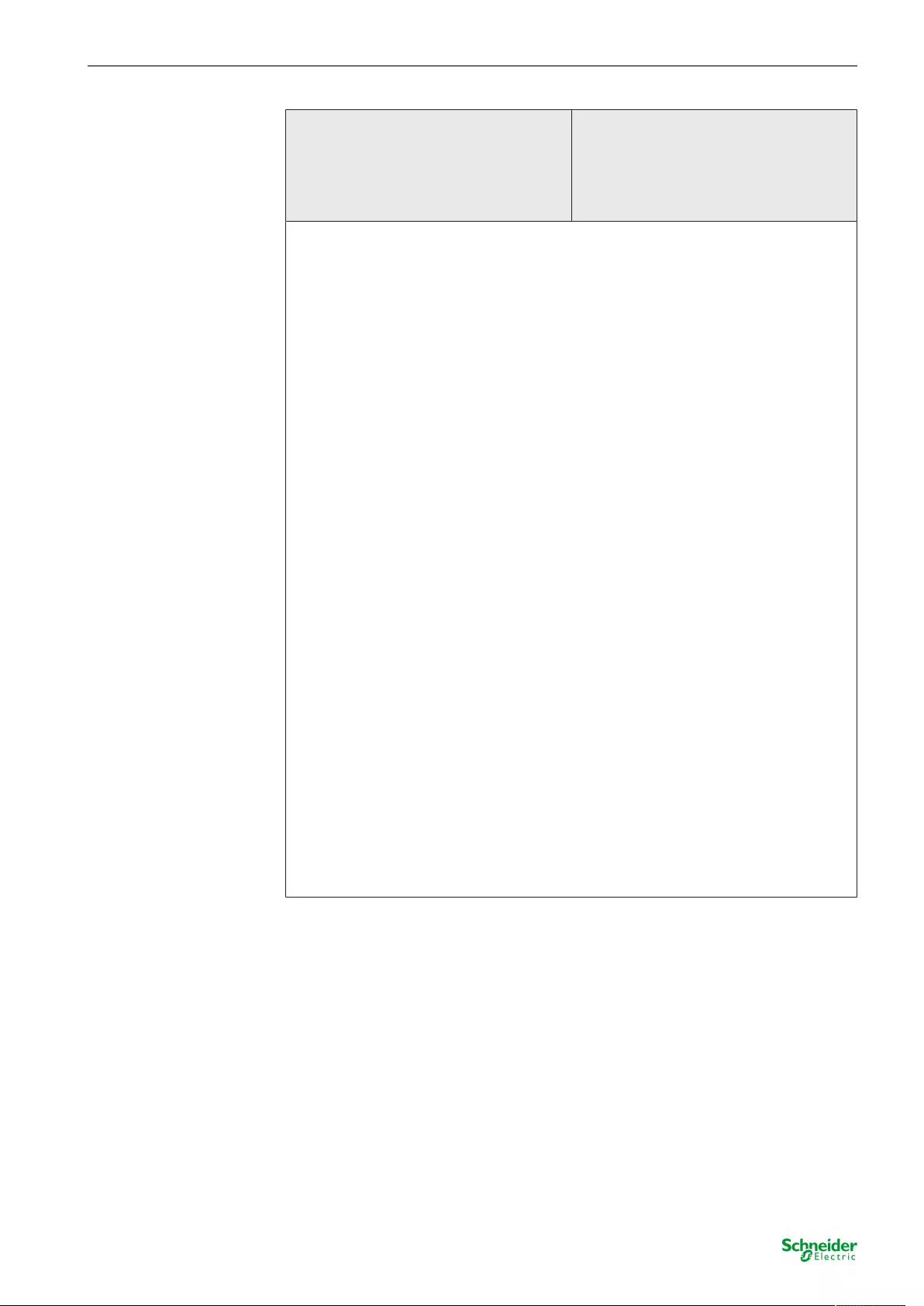
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
110 | MTN6730-0002 11.08.2020
Data format of the command value input Switching (1 bit)
Constant (1 byte) with pulse width mod-
ulat. (PWM)
Const (1 byte) with command value limit-
ing value
The heating actuator receives 1-bit or 1-byte command value telegrams, transmit-
ted, for example, by KNX room temperature controllers. Usually, the room temper-
ature controller determines the room temperature and generates the command
value telegrams using a control algorithm. The actuator controls its valve outputs
either in switching form or with a PWM signal, according to the data format of the
command values and the configuration in the ETS.
Switching (1 bit): In the case of a 1-bit command value, the telegram received via
the command value object is forwarded directly to the appropriate output of the ac-
tuator, taking the configured valve direction of action into account. This means
that, if an "ON" telegram is received, the is valve completely opened. The output is
then energised for energised closed valves and the output is deenergised for en-
ergised opened valve drives. The valve is closed completely when an "OFF" tele-
gram is received. The valve output is then not energised for deenergised closed
valves and energised for deenergised opened valve drives.
Constant (1 byte) with pulse width modulat. (PWM): Command values correspond-
ing to the data format "Constant 1-byte with pulse width modulation (PWM)" are
implemented by the actuator with an equivalent pulse width-modulated switch sig-
nal at the valve outputs. Taking the cycle time settable in the actuator for each
output into account, the average output signal resulting from this modulation is a
measure of the centred valve position of the control valve and thus a reference for
the set room temperature. A shift of the mean value, and thus a change in the
heating capacity, can be obtained by changing the duty factor of the switch-on and
switch-off pulses of the output signal. The duty factor is adapted constantly by the
actuator, depending on the command value received (normal operation) or by act-
ive device functions (e.g. manual operation, forced position, emergency opera-
tion).
Constant (1-byte) with command value limiting value: The data format with limiting
value evaluation can be used as an alternative to the conversion of a 1-byte com-
mand value into constant pulse width modulation at a valve output. Here, the re-
ceived constant command value is converted into a switching output signal, de-
pending on the configured limiting value. The valve drive opens when the com-
mand value reaches the limiting value or exceeds it. A hysteresis is also evaluated
to prevent constant closing and opening of the actuator for command values in the
area of the limiting value. The valve drive only closes when the command value
undershoots the limiting value minus the configured hysteresis.
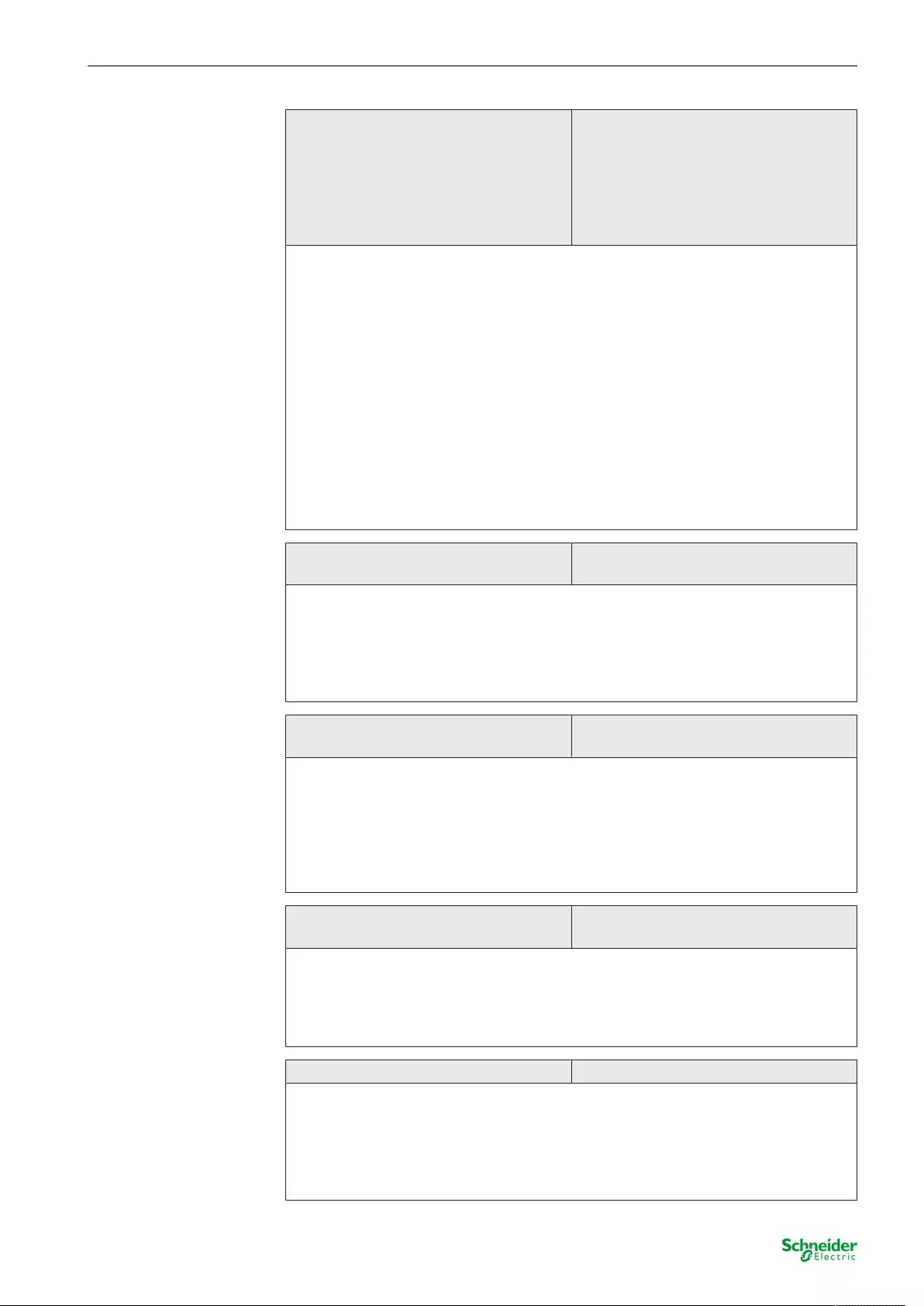
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
111 | MTN6730-0002 11.08.2020
Cycle time for continuous command
value on the valve output
0.5 minutes
1 minute
1.5 minutes
2 minutes
...
19.5 minutes
20 minutes (recommended)
The "Cycle time" parameter specifies the switching frequency of the pulse-width-
modulated output signal of a valve output. It allows adaptation to the adjusting
cycle times (the adjusting time it takes the drive to bring the valve from its com-
pletely closed to its completely opened position) of the valve drives used. In addi-
tion to the adjusting cycle time, take account of the dead time (the time in which
the actuators do not show any response when being switched or off). If different
actuators with different adjusting cycle times are used at an output, take account
of the longest of the times.
The "Cycle time" parameter is also available for valve drives, whose command
value data format is configured to "Switching (1-bit)" or "Constant (1-byte) with
command value limiting value". For such valve outputs, pulse width modulation
can also be executed during an active forced position, emergency operation,
manual operation, bus voltage failure, after bus or mains voltage return or after an
ETS programming operation, for which, as a result, the presetting of a cycle time
is required.
Limiting value of the command value for
opening the valve (1...100 %)
1...10...100
In the 1-byte command value data with limiting value evaluation, the received con-
stant command value is converted into a switching output signal, depending on
the limiting value configured here. The valve drive opens when the command
value reaches the limiting value or exceeds it.
This parameter is only available in the command value data format "Switching
(1-byte) with command value limiting value".
Hysteresis limiting value for closing the
valve (1...10 %)
1...5...10
In the 1-byte command value data with limiting value evaluation, the received con-
stant command value is converted into a switching output signal. A hysteresis is
also evaluated to prevent constant closing and opening of the actuator for com-
mand values in the area of the limiting value. The valve drive only closes when the
command value undershoots the limiting value minus the configured hysteresis.
This parameter is only available in the command value data format "Switching
(1-byte) with command value limiting value".
Activate command value monitoring ? no
yes
Here, cyclical monitoring of the command values can be enabled as an option
("Yes" setting). If, in active cyclical monitoring, there are no command value tele-
grams during the monitoring time preset by the parameter of the same name, then
emergency operation is activated for the affected valve output, for which a config-
urable constant PWM command value can be preset.
Monitoring time Minutes (0...59) 0...10...59
This parameter specifies the monitoring time of the command value monitoring.
The actuator must receive at least one command value telegram within the time
frame specified here. If there is no command value telegram, then the actuator will
assume a fault and will activate emergency operation for the affected valve output.
This parameter is only available if command value monitoring is enabled.
presetting of the monitoring time minutes.
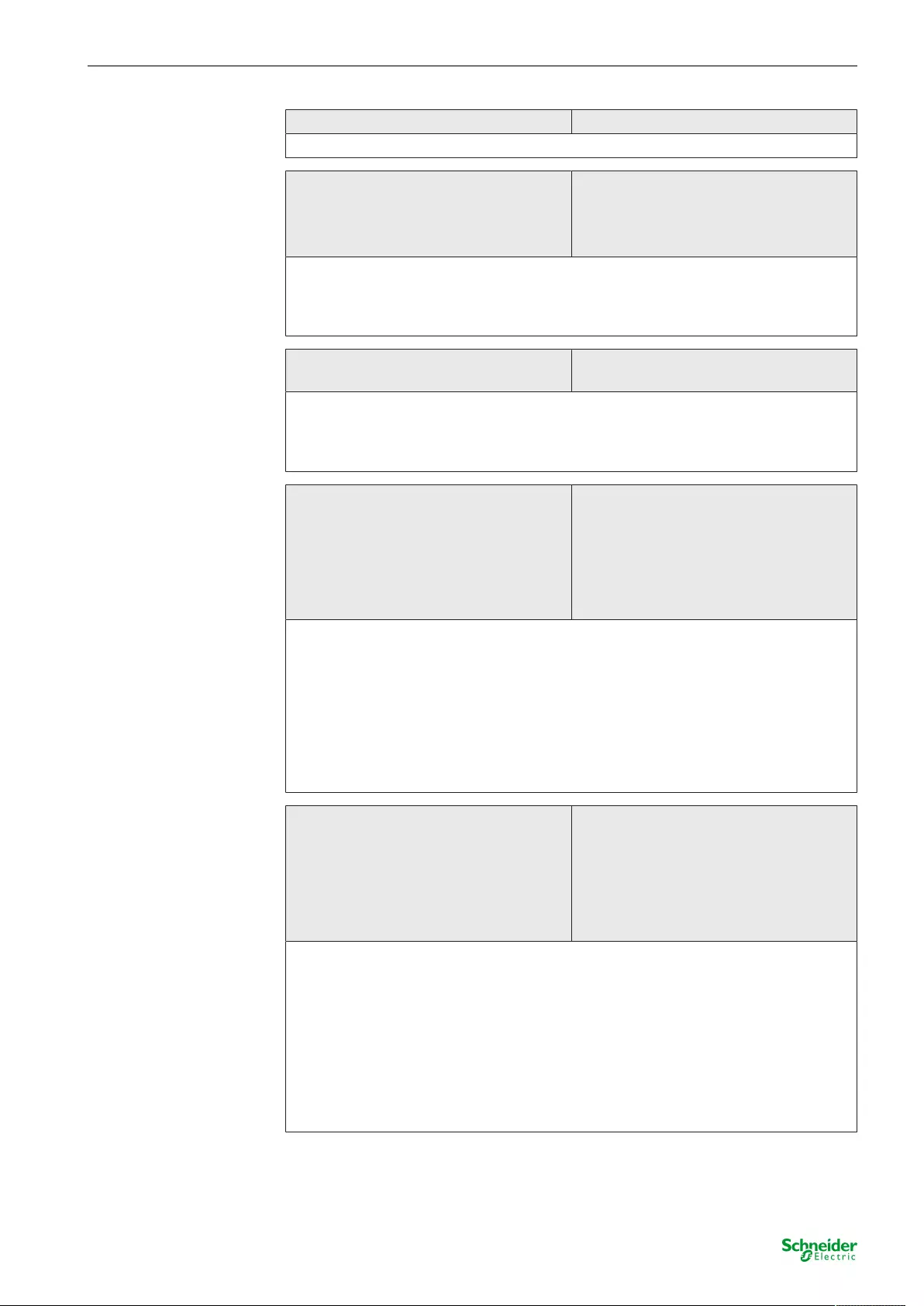
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
112 | MTN6730-0002 11.08.2020
Seconds (10...59) 10...59
presetting of the monitoring time seconds.
Polarity of "Command value fault" object 0 = No fault /
1 = Fault
0 = Fault /
1 = No fault
If a command value fault is identified, then the actuator can optionally transmit a
fault telegram via the object "Command value fault". This parameter defines the
telegram polarity of the fault telegram.
This parameter is only available if command value monitoring is enabled.
Cyclical transmission in the case of
faulty command value ?
no
yes
If a command value fault is identified, then the actuator can optionally transmit the
fault telegram cyclically. Here, the cyclical transmission of the fault telegram can
be enabled as required ("Yes" setting).
This parameter is only available if command value monitoring is enabled.
Command value in the case of emer-
gency operation
0 %
10 %
...
30 %
...
90 %
100 %
When a fault in the input command value is detected and also in the case of a bus
voltage failure, after bus or mains voltage return and after an ETS programming
operation (configurable), it is possible to set the emergency operation command
value configured here as the active command value.
When the command value of emergency operation is polled, valve outputs con-
figured to the command value data formats "Switching (1-bit)" or "Constant (1-
byte) with command value limiting value" are always activated by a constant com-
mand value with pulse width modulation.
This parameter is only available when no summer / winter switch-over is planned.
Command value in the case of emer-
gency operation Summer
0 %
10 %
...
30 %
...
90 %
100 %
When a fault in the input command value is detected and also in the case of a bus
voltage failure, after bus or mains voltage return and after an ETS programming
operation (configurable), it is possible to set the emergency operation command
value configured here as the active command value. The command value preset
here is only applied if summer operation is activated.
When the command value of emergency operation is polled, valve outputs con-
figured to the command value data formats "Switching (1-bit)" or "Constant (1-
byte) with command value limiting value" are always activated by a constant com-
mand value with pulse width modulation.
This parameter is only available when a summer / winter switch-over is planned.
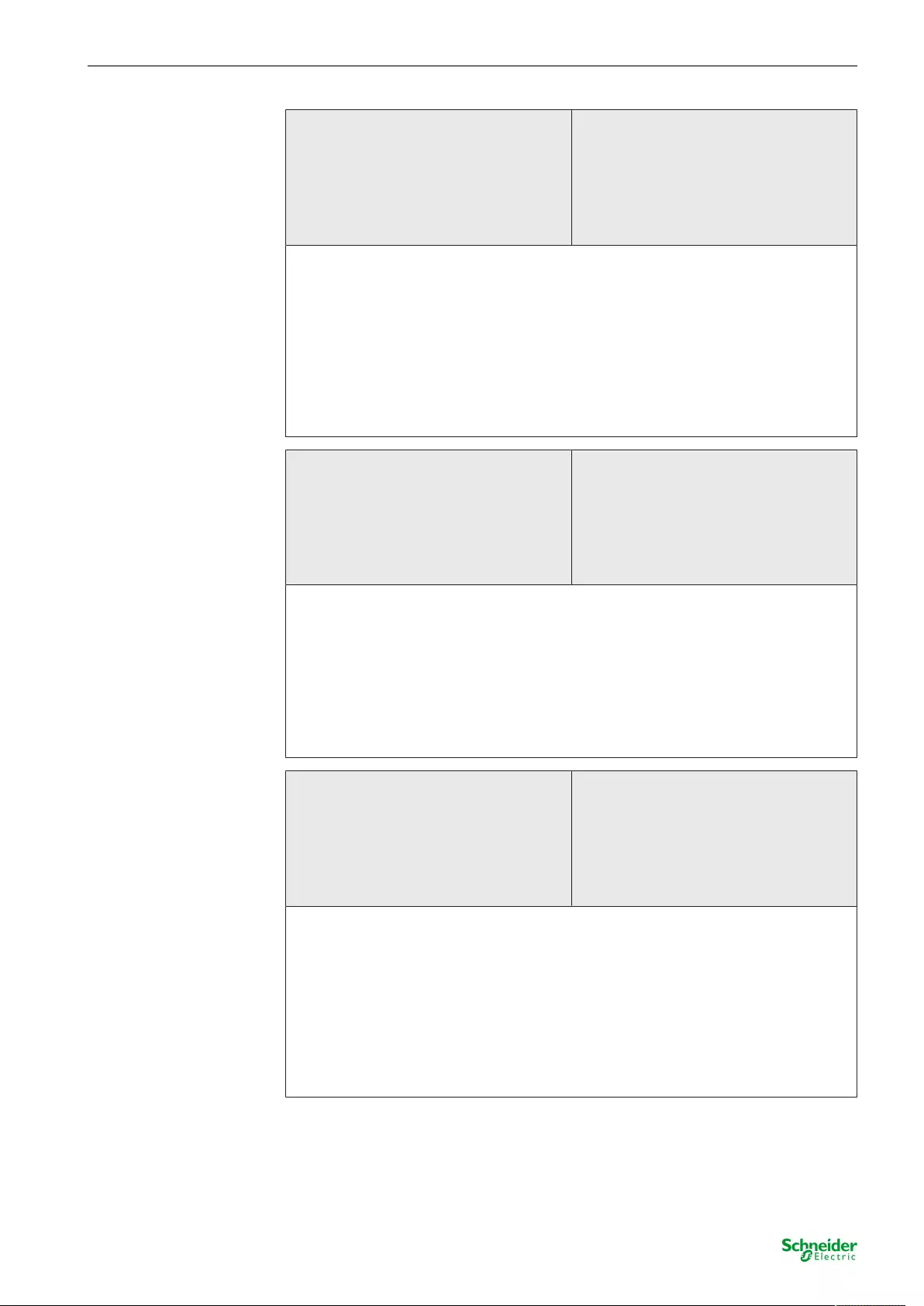
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
113 | MTN6730-0002 11.08.2020
Command value in the case of emer-
gency operation Winter
0 %
10 %
...
70 %
...
90 %
100 %
When a fault in the input command value is detected and also in the case of a bus
voltage failure, after bus or mains voltage return and after an ETS programming
operation (configurable), it is possible to set the emergency operation command
value configured here as the active command value. The command value preset
here is only applied if winter mode is activated.
When the command value of emergency operation is polled, valve outputs con-
figured to the command value data formats "Switching (1-bit)" or "Constant (1-
byte) with command value limiting value" are always activated by a constant com-
mand value with pulse width modulation.
This parameter is only available when a summer / winter switch-over is planned.
Command value in the case of forced
position
0 %
10 %
...
30 %
...
90 %
100 %
When forced operation is activated via a 1-bit object and also in the case of a bus
voltage failure, after bus or mains voltage return and after an ETS programming
operation (configurable), it is possible to set the forced command value configured
here as the active command value.
When the command value of the forced position is polled, valve outputs con-
figured to the command value data formats "Switching (1-bit)" or "Constant (1-
byte) with command value limiting value" are always activated by a constant com-
mand value with pulse width modulation.
This parameter is only available when no summer / winter switch-over is planned.
Command value in the case of forced
position Summer
0 %
10 %
...
30 %
...
90 %
100 %
When forced operation is activated via a 1-bit object and also in the case of a bus
voltage failure, after bus or mains voltage return and after an ETS programming
operation (configurable), it is possible to set the forced command value configured
here as the active command value. The command value preset here is only ap-
plied if summer operation is activated.
When the command value of the forced position is polled, valve outputs con-
figured to the command value data formats "Switching (1-bit)" or "Constant (1-
byte) with command value limiting value" are always activated by a constant com-
mand value with pulse width modulation.
This parameter is only available when a summer / winter switch-over is planned.
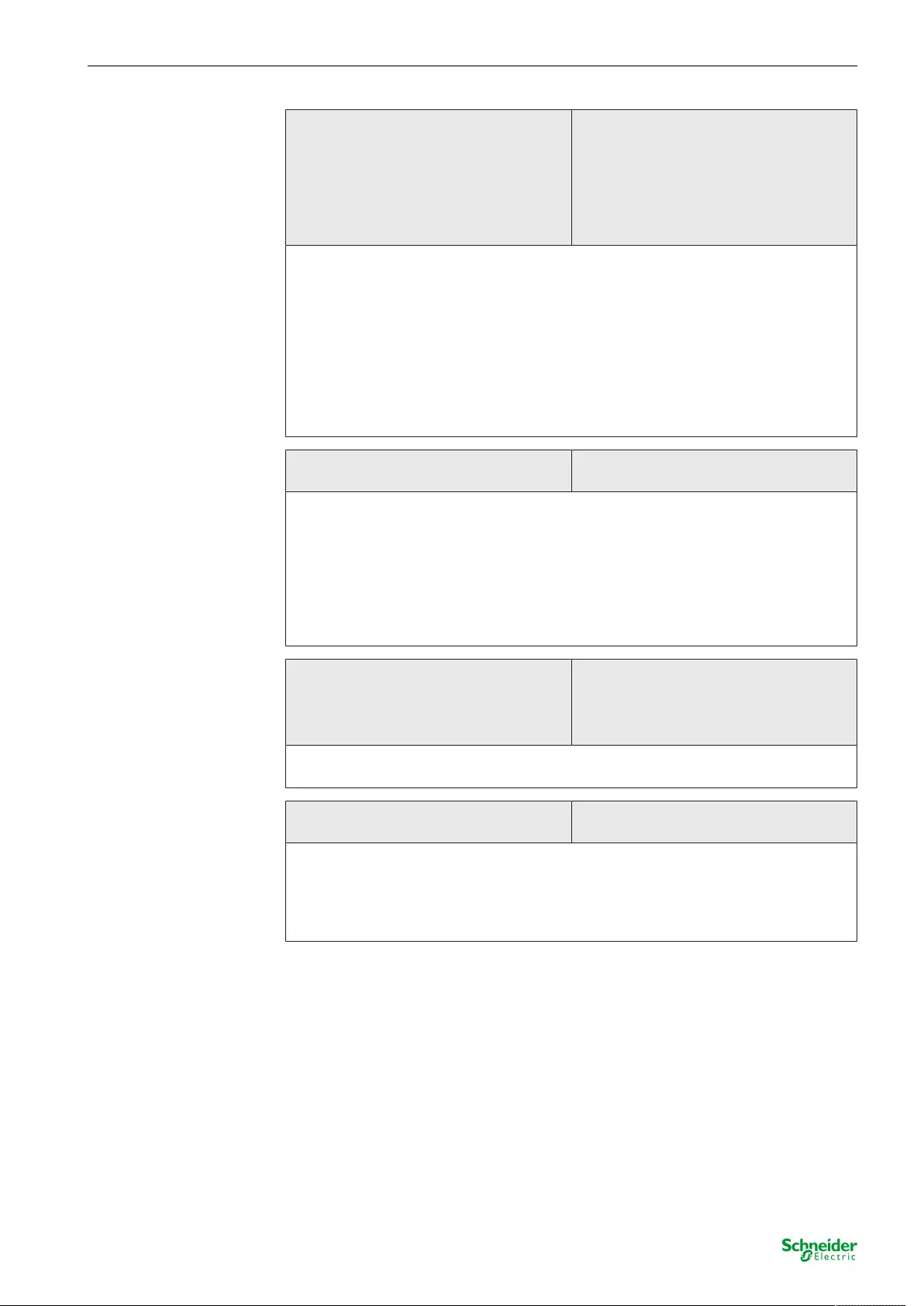
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
114 | MTN6730-0002 11.08.2020
Command value in the case of forced
position Winter
0 %
10 %
...
70 %
...
90 %
100 %
When forced operation is activated via a 1-bit object and also in the case of a bus
voltage failure, after bus or mains voltage return and after an ETS programming
operation (configurable), it is possible to set the forced command value configured
here as the active command value. The command value preset here is only ap-
plied if winter mode is activated.
When the command value of the forced position is polled, valve outputs con-
figured to the command value data formats "Switching (1-bit)" or "Constant (1-
byte) with command value limiting value" are always activated by a constant com-
mand value with pulse width modulation.
This parameter is only available when a summer / winter switch-over is planned.
Use object for forced position ? no
yes
A forced position can be configured separately for each valve output here and ac-
tivated according to requirements. If a forced position is active, a defined com-
mand value is set at the output (see parameter "Command value in case of forced
position..."). Affected valve outputs are then locked so that they can no longer be
activated using functions subject to the forced position (including activation by
command value telegrams).
For each valve output, the forced position is activated and deactivated via a separ-
ate 1-bit object. This parameter will enable the object (setting "Yes").
Polarity of "Forced position" object 0 = No forced pos. /
1 = Forced pos. active
0 = Forced pos. active /
1 = No forced pos.
The telegram polarity of the "Forced position" object is defined here when the
forced position object is enabled.
Feed back valve command value ? no
yes
A status object can be optionally enabled here ("Yes" setting) for each valve out-
put. The status object makes the active command value of a valve output avail-
able either actively transmitting or passively (object can be read out). During
status feedback, the actuator takes all the functions into account which have an in-
fluence on the command value implemented at the output.
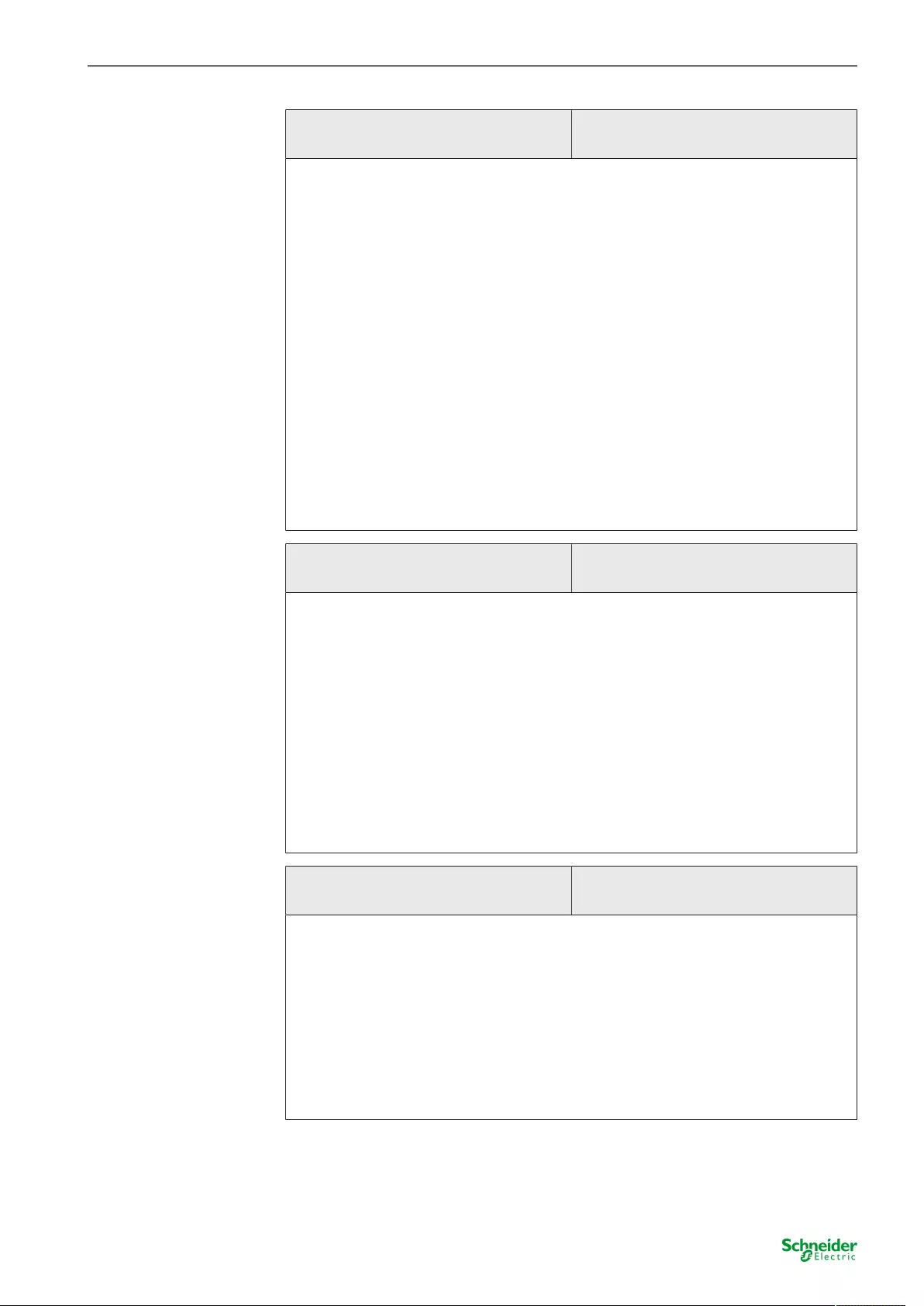
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
115 | MTN6730-0002 11.08.2020
Type of feedback active signalling object
passive status object
The status feedback can be used as an active signal object or as a passive status
object. As an active signal object, the feedback is also directly transmitted to the
bus whenever there is a change to the status value. As a passive status object,
there is no telegram transmission after a change. In this case, the object value
must be read out. The ETS automatically sets the communication flags of the
status objects required for proper functioning.
This parameter is only visible in case of enabled status feedback.
Active signalling object: The feedback telegram is transmitted as soon as the
status changes. An automatic telegram transmission of the feedback takes place
after bus voltage return, if the supply voltage of the actuators fails and returns or
after an ETS programming operation (possibly with a delay). The status object
does not transmit if the status does not change after the activation or deactivation
of device functions or new input command values. Transmission only ever takes
place after changes to the command value.
Passive status object: The feedback telegram will only be transmitted in response
if the status object is read out from the bus by a read telegram. No automatic tele-
gram transmission of the feedback takes place after bus voltage return, if the sup-
ply voltage of the actuators fails and returns or after an ETS programming opera-
tion.
Time delay for feedback after bus
voltage return ?
yes
no
If used as active signal object, the state of the status feedback information is
transmitted to the bus after bus voltage return or after an ETS programming oper-
ation. In these cases, feedback can be time-delayed with the time delay being pre-
set globally for all valve outputs together on the "General" parameter page.
This parameter is only visible in case of an enabled status feedback and only
when the object is actively transmitting.
yes: The status feedback will be transmitted with a delay after bus voltage return
or after an ETS programming operation. No feedback is transmitted during a run-
ning time delay, even if the valve state changes during this delay. If the supply
voltage of the actuators fails and returns, then the status feedback is always trans-
mitted without a delay, providing that the bus voltage supply is switched on.
no: The status feedback will be transmitted immediately after bus voltage return or
after an ETS programming operation.
Cyclical transmission of the feedback ? yes
no
The status feedback telegram can also be transmitted cyclically via the active sig-
nal object in addition to the transmission after changes.
This parameter is only visible in case of an enabled status feedback and only
when the object is actively transmitting.
yes: Cyclical transmission is activated. The cycle time is defined centrally for all
the valve outputs on the parameter page "General". There is no cyclical transmis-
sion during an active time delay after bus voltage return or an ETS programming
operation.
no: Cyclical transmission is deactivated so that the feedback telegram is transmit-
ted to the bus only when the status is changed by the actuator.
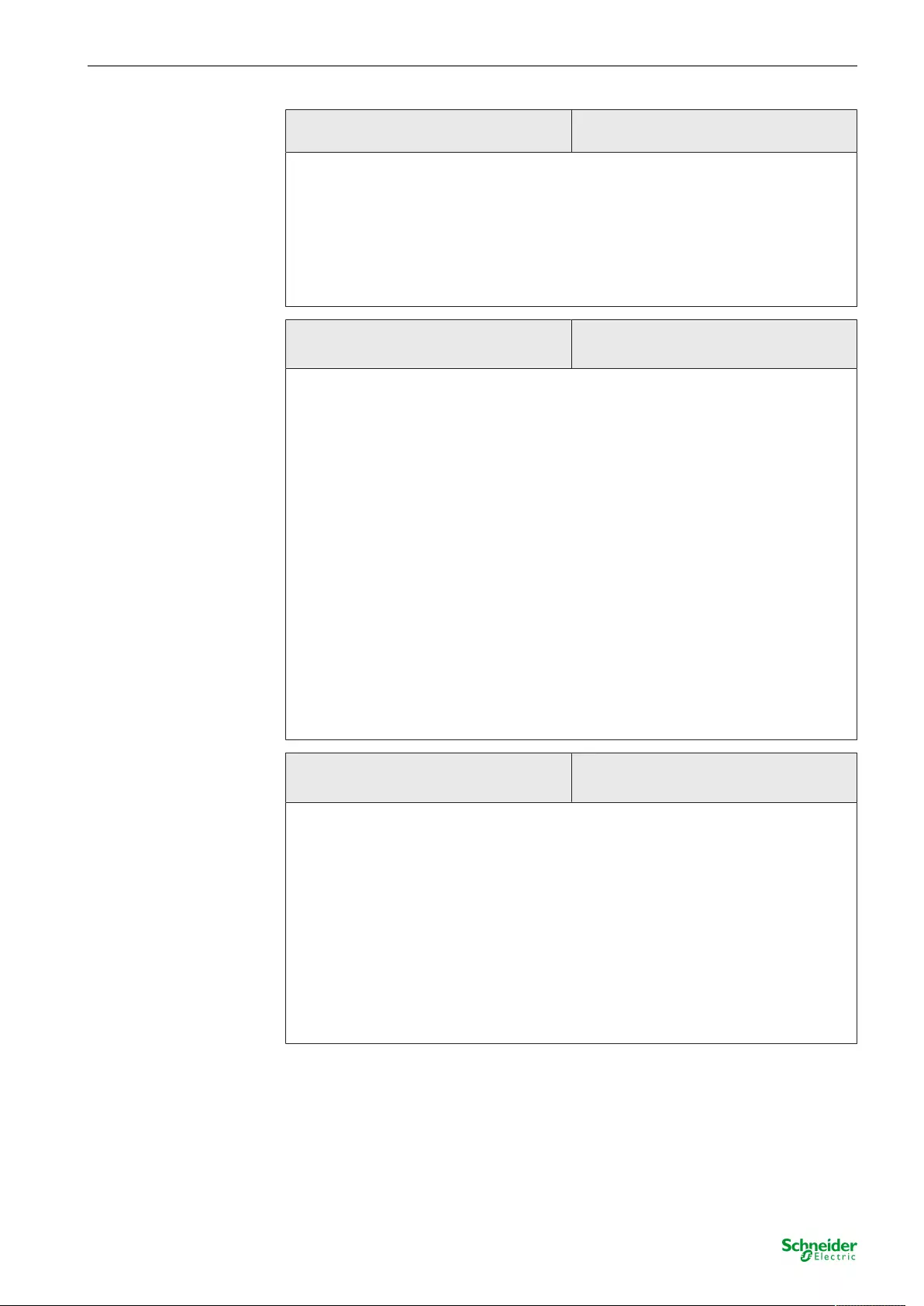
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
116 | MTN6730-0002 11.08.2020
Feed back combined valve status ? no
yes
The combined valve status allows the collective feedback of various functions of a
valve output in a single 1-byte bus telegram. It helps to forward the status informa-
tion of an output to a suitable recipient (e.g. KNX visualisation) in a targeted man-
ner, without having to evaluate various global and channel-orientated feedback
and status functions of the actuator. The communication object "Feedback com-
bined valve status" contains 7 different items of status information, which are bit-
encoded.
In the "Yes" setting, this parameter enables the combined valve status.
Type of combined status feedback active signalling object
passive status object
The combined valve status can be used as an active signal object or as a passive
status object. As an active signal object, the feedback is also directly transmitted
to the bus whenever there is a change to the status value. As a passive status ob-
ject, there is no telegram transmission after a change. In this case, the object
value must be read out. The ETS automatically sets the communication flags of
the status objects required for proper functioning.
This parameter is only available if the combined valve status is enabled.
Active signalling object: The feedback telegram is transmitted as soon as the
status changes. Automatic telegram transmission of the feedback takes place
after bus voltage return and after an ETS programming operation (possibly with a
time delay). The combined status object does not transmit if the status information
does not change after the activation or deactivation of device functions or new in-
put command values. Only changes are ever transmitted. If the supply voltage of
the actuators fails and returns, then the combined status feedback is not transmit-
ted.
Passive status object: The feedback telegram will only be transmitted in response
if the status object is read out from the bus by a read telegram. No automatic tele-
gram transmission of the feedback takes place after bus voltage return or after
programming with the ETS.
Time delay for feedback after bus
voltage return ?
yes
no
If used as active signal object, the state of the combined status feedback informa-
tion is transmitted to the bus after bus voltage return or after an ETS programming
operation. In these cases, feedback can be time-delayed with the time delay being
preset globally for all valve outputs together on the "General" parameter page.
This parameter is only available if the combined valve status is enabled.
yes: The status feedback will be transmitted with a delay after bus voltage return
or after an ETS programming operation. No feedback is transmitted during a run-
ning time delay, even if the valve state changes during this delay. If the supply
voltage of the actuators fails and returns, then the status feedback is always trans-
mitted without a delay, providing that the bus voltage supply is switched on.
no: The status feedback will be transmitted immediately after bus voltage return or
after an ETS programming operation.
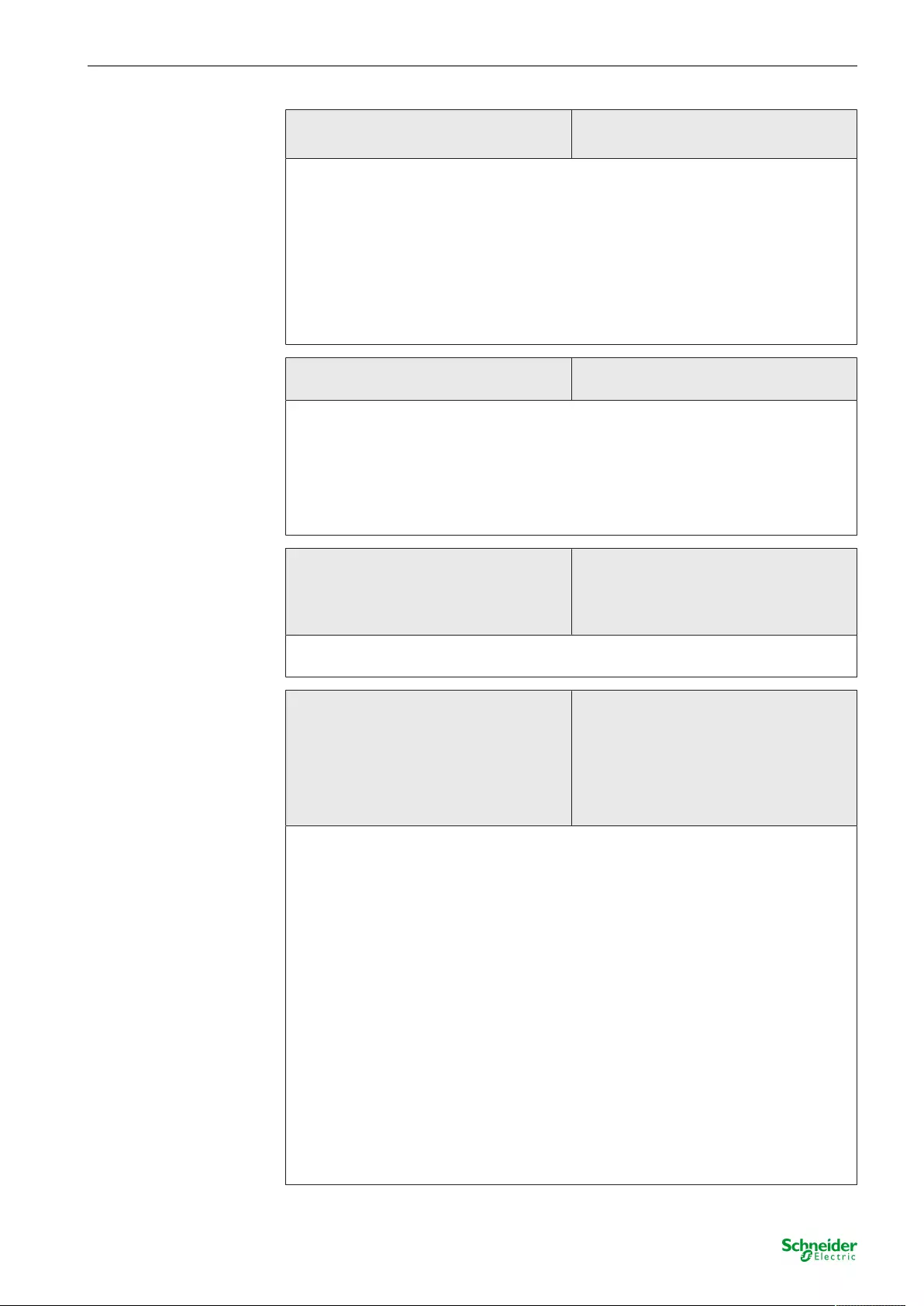
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
117 | MTN6730-0002 11.08.2020
Cyclical transmission of the feedback ? yes
no
The combined status feedback telegram can also be transmitted cyclically via the
active signal object in addition to the transmission after changes.
This parameter is only available if the combined valve status is enabled.
yes: Cyclical transmission is activated. The cycle time is defined centrally for all
the valve outputs on the parameter page "General". There is no cyclical transmis-
sion during an active time delay after bus voltage return or an ETS programming
operation.
no: Cyclical transmission is deactivated so that the feedback telegram is transmit-
ted to the bus only when the status is changed by the actuator.
Signalling short-circuit / overload ? no
yes
The actuator is able to detect an overload or a short-circuit at the valve outputs
and, in consequence, to protect them against destruction. Outputs which have ex-
perienced a short-circuit or a constant load are deactivated after an identification
period. In this case, a short-circuit or overload signal can be transmitted via a KNX
communication object.
In the "Yes" setting, this parameter enables the object "Short-circuit / overload sig-
nal".
Polarity of object "Short-circuit / over-
load"
0 = No short-cir, overld. /
1 = Short-cir, overld.
0 = Short-cir, overld. /
1 = No short-cir, overld.
When the object for short-circuit / overload messaging is enabled, the telegram
polarity of the "Short-circuit / overload signal" object is defined here.
Output reacts to command value from Controller 1
Controller 2
Controller 3
Controller 4
Controller 5
Controller 6
No internal command value
The actuator contains up to 6 room temperature controllers (RTC), which are in-
tegrated in the device software and which work independently of the process. The
command value outputs of these controllers can be internally linked to the elec-
tronic valve outputs of the actuator, meaning that temperature control and valve
activation can take place using just one bus device, if required.
Internal group communication interconnects device functions, without using ex-
ternal group addresses which are linked to communication objects. This means
that it is possible to link any command value outputs of the internal controller with
the valve outputs of the actuator via parameters in the application program. The
precondition is that the data formats (1-bit / 1-byte) of the command value inputs
and outputs to be linked are identical.
An internal controller must be selected here, to whose command values an as-
signment of the valve output is to occur.
In the "No internal command value" setting, the internal group communication of
the selected valve output is deactivated. In this case, the output can only be activ-
ated using the external communication objects.
The presetting of this parameter is dependent on the selected valve output and
also dependent on which controllers are enabled.
This parameter is only visible when internal group communication is used.
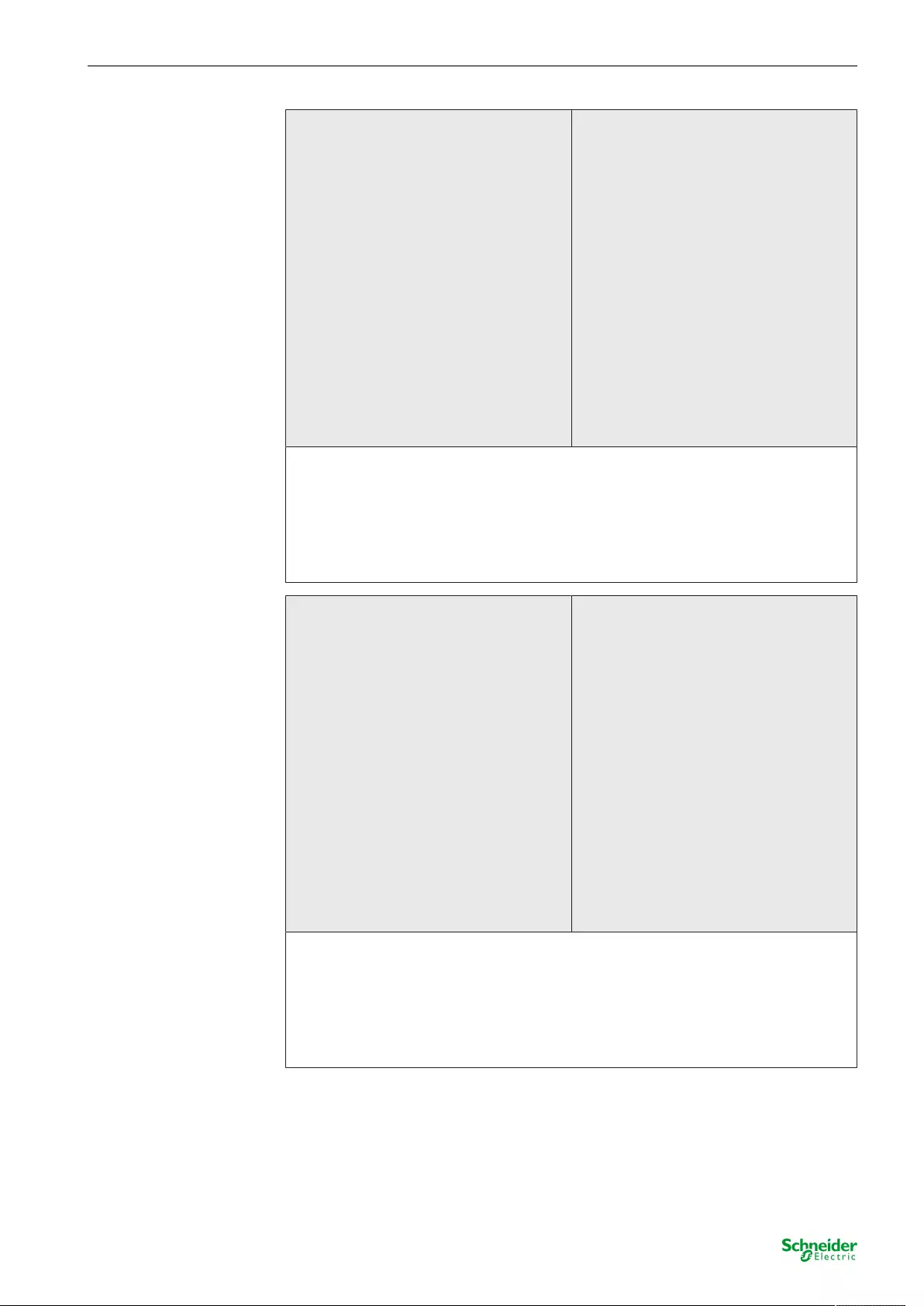
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
118 | MTN6730-0002 11.08.2020
Command value for valve output
(switching 1-bit)
Controller x Command value heating
Controller x Command value basic level
heating
Controller x Command value additional
level heating
Controller x Command value basic level
Controller x Command value cooling
Controller x Command value basic level
cooling
Controller x Command value additional
level cooling
Controller x Command value additional
level
Controller x Command value cooling/
heating
The required switching command value of the chosen internal controller must be
selected here. This makes it possible, depending on the application, to assign the
valve output to available internal command values of the appropriate data format.
The presetting of this parameter and the available selection of the settings is de-
pendent on the configuration of the selected controller.
A selection is then only possible with this parameter when the selected internal
controller possesses switching command values.
Command value for valve output (con-
tinuous 1-byte)
Controller x Command value heating
Controller x Command value basic level
heating
Controller x Command value additional
level heating
Controller x Command value basic level
Controller x Command value cooling
Controller x Command value basic level
cooling
Controller x Command value additional
level cooling
Controller x Command value additional
level
Controller x Command value cooling/
heating
The required constant command value of the chosen internal controller must be
selected here. This makes it possible, depending on the application, to assign the
valve output to available internal command values of the appropriate data format.
The presetting of this parameter and the available selection of the settings is de-
pendent on the configuration of the selected controller.
A selection is then only possible with this parameter when the selected internal
controller possesses constant command values.
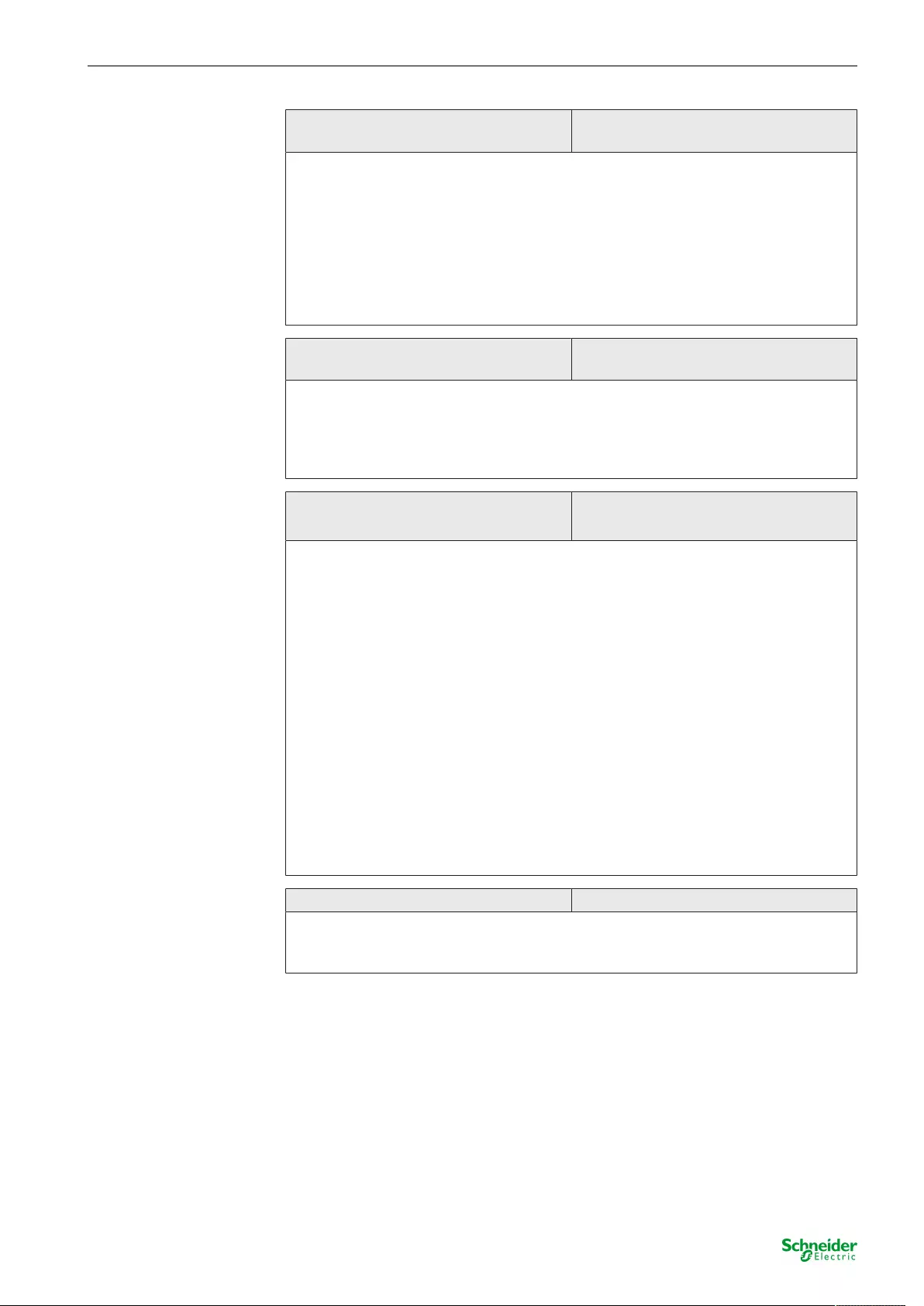
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
119 | MTN6730-0002 11.08.2020
Use function "Valve rinsing" ? no
yes
To prevent calcification or sticking of a valve which has not been activated for
some time, the actuator has an automatic valve rinsing function. Valve rinsing can
be executed cyclically or using a bus command, causing the activated valves to
run through the full valve stroke for a preset period of time. During valve rinsing,
the actuator activates a command value of 100 % without interruption for the af-
fected valve output for half of the configured "Valve rinsing time". For this, the
valves open completely. After half the time, the actuator switches to a command
value of 0%, causing the connected valves to close completely.
In the "Yes" setting, this parameter enables valve rinsing.
Length of the valve rinsing (1...59
minutes)
1...5...59
Here, preset for how long the rinse function (100 % -> 0 %) is to be executed. Set
the length of the valve rinsing to the adjustment cycle time of the electrothermal
actuators in such a way that they open and close completely. This is usually guar-
anteed by configuring the rinsing length to double the adjustment cycle time.
This parameter is only available if valve rinsing is enabled.
Activate cyclical valve rinsing ? yes
no
The actuator can perform valve rinsing cyclically, if necessary. When using the
cyclical valve rinsing, a rinse operation can be started automatically after a config-
urable cycle time (1...26 weeks). Here too, the valve rinsing length configured in
the ETS defines the time for the once-only, complete opening and closing of the
activated valve drives. At the end of a rinsing operation, the actuator always re-
starts the cycle time.
This parameter is only available if valve rinsing is enabled.
yes: Cyclical valve rinsing is enabled. Each ETS programming operation resets
the cycle time. The first rinsing operation with cyclical valve rinsing takes place
after an ETS programming operation after the first time cycle has elapsed. If there
is a bus voltage failure, the actuator saves the remaining residual time of the cur-
rent time cycle. The residual cycle time is restarted after bus voltage return. A bus
voltage failure immediately interrupts an active rinsing operation. When the bus/
mains voltage returns, a previously interrupted rinsing operation is not executed
again. The actuator then starts a new time cycle for cyclical valve rinsing.
no: Cyclical valve rinsing is completely disabled. Valve rinsing can only be started
by the communication object (if enabled).
Cycle time (1...26 weeks) 1...26
This parameter defines how often cyclical valve rinsing is to be performed auto-
matically.
This parameter is only available if cyclical valve rinsing is enabled.
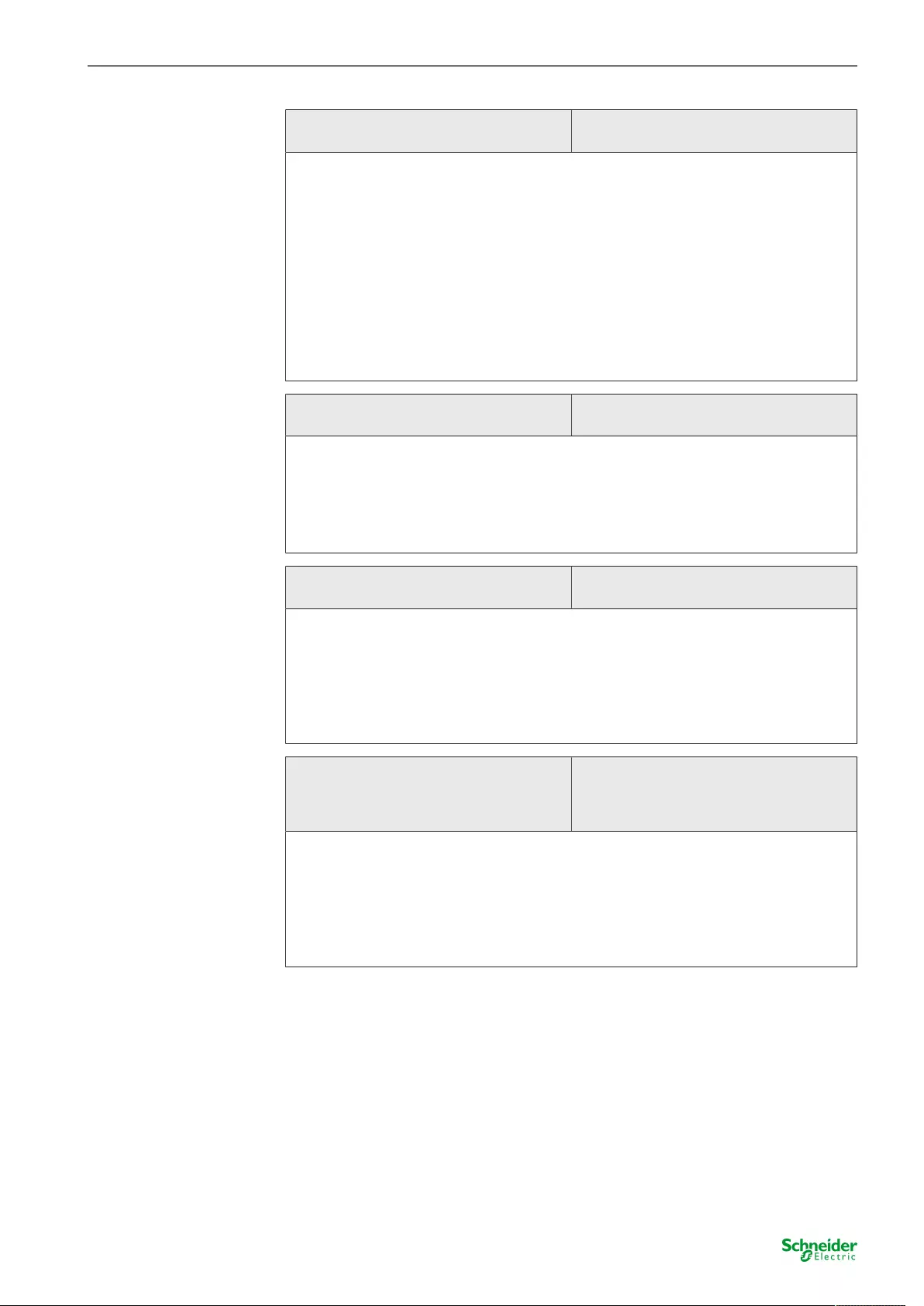
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
120 | MTN6730-0002 11.08.2020
Use intelligent valve rinsing ? no
yes
Optionally, intelligent cyclical valve rinsing can be additionally activated here.
Here, valve rinsing is only executed repeatedly, if, in the current time cycle, a con-
figured minimum command value limiting value was not exceeded. It the active
command value exceeds the limiting value, then the actuator will stop the cycle
time. The valve drive only restarts the cycle time if, in the further course of the
command value change, a command value of "0 %" or "OFF" (completely closed)
is set. This prevents valve rinsing if the valve has already run through a sufficiently
defined stroke.
If, after exceeding the configured limiting value, the value was not completely
closed at least once (command value "0 %" or "OFF"), then no further cyclical
valve rinsing will take place.
This parameter is only available if cyclical valve rinsing is enabled.
Limiting value minimum command value
(10...100 %)
10...50...100
This parameter defines the minimum command value limiting value of the intelli-
gent valve rinsing. Intelligent valve rinsing is only executed repeatedly, if, in the
current time cycle, a minimum command value limiting value configured here was
not exceeded. It the active command value exceeds the limiting value, then the
actuator will stop the cycle time.
This parameter is only available if cyclical valve rinsing is enabled.
Valve rinsing activated externally ? no
yes
If necessary, valve rinsing can be started and, optionally, stopped using its own 1-
bit communication object. This means that it is possible to activate a rinsing opera-
tion of the valve controlled by time or an event. It is also possible, for example, to
cascade multiple heating actuators, so that they perform valve rinsing simultan-
eously (link of the individual status objects to the input objects of the valve rins-
ing). Bus control can only be used if it has been enabled here.
This parameter is only available if valve rinsing is enabled.
Polarity of object "Valve rinsing Start /
Stop"
0 = Stop / 1 = Start
0 = Start / 1 = Stop
0 = --- / 1 = Start (Stop not possible)
This parameter sets the telegram polarity of the object for external valve rinsing.
The name of the object is aligned to the setting of the permitted telegram polarity
("Start / stop valve rinsing" or "Start valve rinsing"). When a start command is re-
ceived, the actuator immediately starts the configured time for a rinsing operation.
The actuator also actively executes valve rinsing if no higher-priority function is
active. If bus-controlled stopping is permitted, then the actuator will also react to
stop commands by immediately interrupting running rinsing operations.
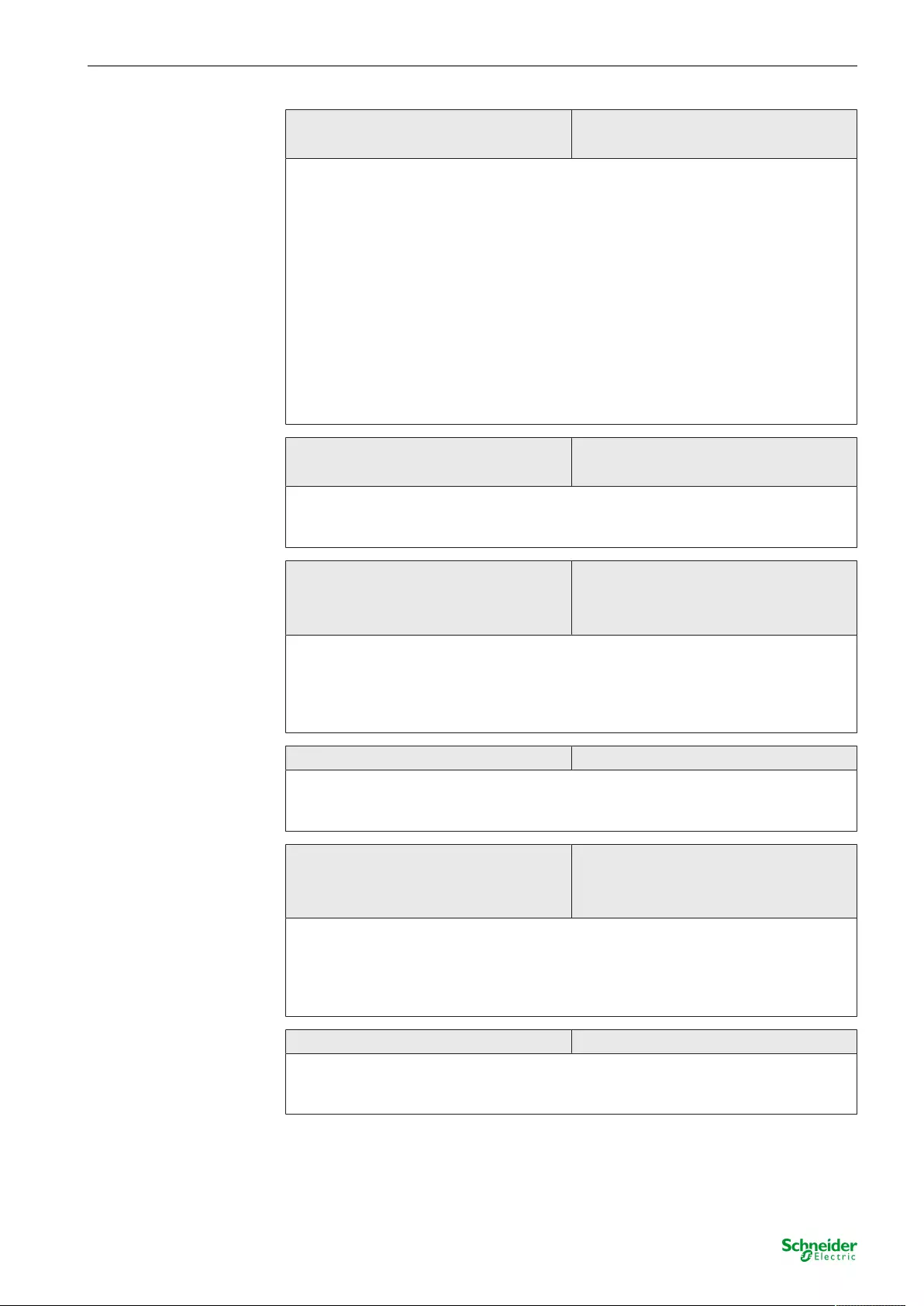
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
121 | MTN6730-0002 11.08.2020
Use operating hours counter ? no
yes
The operating hours counter can be enabled here. The operating hours counter
determines the switch-on time of a valve output. For the operating hours counter,
an output is actively on, when it is energised, i.e. when the status LED on the front
panel of the device. As a result, the operating hours counter determines the time
during which deenergised closed valves are opened or deenergised opened
valves are closed.
If the operating hours counter is not enabled, no operating hours will be counted
for the valve output concerned. Once the operating hours counter is enabled, how-
ever, the operating hours will be determined and added up by the ETS immedi-
ately after commissioning the actuator.
If the operating hours counter is subsequently disabled again in the parameters
and the actuator is programmed with this disabling function, all operating hours
previously counted will be deleted. When enabled again, the meter reading of the
operating hours counter is always on "0 h".
Type of counter up-counter
down-counter
The operating hours counter can be configured as an up-counter or down-counter.
The setting here influences the visibility of the other parameters and objects of the
operating hours counter.
Limiting value specification ? no
yes, as received via object
yes, as specified in parameter
If the up-counter is used, a limiting value can optionally be predefined. This para-
meter defines whether the limiting value can be set via a separate parameter or
adapted individually by a communication object from the bus. The "No" setting de-
activates the limiting value.
This parameter is only visible in the configuration "Up-counter" counter type.
Limit value (0...65535 h) 0...65535
The limiting value of the up-counter is set here.
This parameter is only visible in the "Up-counter" counter type if the parameter
"Limiting value presetting ?" is set to "Yes like the parameter".
Start value preset ? no
yes, as received via object
yes, as specified in parameter
If the down-counter is used, a start value can optionally be predefined. This para-
meter defines whether the start value can be set via a separate parameter or ad-
apted individually by a communication object from the bus. The setting "No" deac-
tivates the start value.
This parameter is only visible in the "Down-counter" counter type.
Start value (0...65535 h) 0...65535
The start value of the down-counter is set here.
This parameter is only visible in the "Down-counter" counter type and also only if
the parameter "Start value preset ?" is set to "Yes like the parameter".
SpaceLogic KNX Valve Drive Controller Parameter for valve outputs
122 | MTN6730-0002 11.08.2020
Automatic transmitting of the counter
value
cyclical
after change by interval value
The current meter reading of the operating hours counter can be transmitted act-
ively to the bus via the "value operating hours counter" communication object.
Cyclically: The meter reading is transmitted cyclically to the bus and when there is
a change. The cycle time is configured generally on the parameter page "Gen-
eral".
After change by interval value: The meter reading is transmitted to the bus only
when there is a change.
Counting value interval (1…65535h) 1...65535
The interval of the counter value is set here for automatic transmission. The cur-
rent meter reading is transmitted to the bus after the time value configured here.
This parameter is only visible if the parameter "Automatic transmission of the num-
ber value" is set to "Change on interval value".
Assignment to the function "Pump con-
trol" ?
no
yes
The heating actuator allows switching activation of the circulation pump of a heat-
ing or cooling circuit via a 1-bit KNX telegram. Pump control is a global function of
the heating actuator. It is enabled and configured on the "Valve / pump" parameter
page. The parameter "Assignment to the function 'Pump control' ?" specifies
whether the appropriate valve output is included in the pump control.
The presetting of the parameter depends on the enabling function of the function.
If pump control is not enabled on the "Valve / pump" parameter page, then the
ETS will permanently set this parameter to "No". In this case, assignment is not
possible. If pump control is enabled, this parameter is preset to "Yes".
Assignment to the "Heat requirement"
function ?
no
yes
The heating actuator can even evaluate the command values of its outputs and
make general heat requirement available in the form of limiting value monitoring
with hysteresis (1 bit, switching). Using a KNX switch actuator, this allows the en-
ergy-efficient activation of burner and boiler controllers with suitable control inputs
(e.g. requirement-orientated switch-over between the reduction and comfort set-
point in a central combi boiler). The heat requirement control function is a global
function of the heating actuator. It is enabled and configured on the "Valve / pump"
parameter page. The parameter "Assignment to the 'Heat requirement' function ?"
specifies whether the appropriate valve output is included in the heat requirement
control.
The presetting of the parameter depends on the enabling function of the function.
If the heat requirement function is not enabled on the "Valve / pump" parameter
page, then the ETS will permanently set this parameter to "No". In this case, as-
signment is not possible. If the heat requirement function is enabled, this para-
meter is preset to "Yes".

SpaceLogic KNX Valve Drive Controller Objects for valve outputs
123 | MTN6730-0002 11.08.2020
Assignment to the "Largest command
value" function ?
no
yes
The actuator can determine the largest constant command value and forward it to
another bus device (e.g. suitable calorific furnaces with integrated KNX control or
visualisation). In the "Yes" setting, the heating actuator evaluates all the active
1-byte command values of the valve outputs and, optionally, the externally re-
ceived largest command value (object "External largest command value") and
transmits the largest command value via the "Largest command value" object. In
the case of valve outputs configured in the ETS to the command value data
formats "Switching (1-bit)" or "Constant (1-byte) with command value limiting
value", there is no evaluation of the command values preset via the bus.
Exception: It may also occur with such command value outputs that a constant
command value is active (e.g. after bus/mains voltage return or a forced position
and emergency operation or manual operation). In this case, this constant com-
mand value is also included in the calculation of the largest command value until
the named functions with a higher priority are exited or a new command value
telegram is received via the bus, overriding the constant command value at the
valve output.
The "Largest command value" function is a global function of the heating actuator.
It is enabled and configured on the "Valve / pump" parameter page. The "Assign-
ment to the 'Largest command value' function ?" parameter specifies whether the
appropriate valve output is included in the evaluation of the largest command
value.
The presetting of the parameter depends on the enabling function of the function.
If the "Largest command value" function is not enabled on the "Valve / pump"
parameter page, then the ETS will permanently set this parameter to "No". In this
case, assignment is not possible. If the "Largest command value" function is en-
abled, then the parameter can be edited. It is also then present to "No".
Assignment to service mode ? no
yes
Service mode allows the bus-controlled locking of all or some valve outputs for
maintenance or installation purposes. If service mode is active, actuators can be
moved to a defined position (completely open or closed) and locked against activ-
ation by command value telegrams. Service mode is a global function of the heat-
ing actuator. It is enabled and configured on the "General" parameter page. The
parameter "Assignment to service mode ?" specifies whether the affected valve
output is influenced by the service mode.
The presetting of the parameter depends on the enabling function of the function.
If service mode is not enabled on the "General" parameter page, then the ETS will
permanently set this parameter to "No". In this case, assignment is not possible. If
service mode is enabled, this parameter is preset to "Yes".
10.13 Objects for valve outputs
Function command value presetting
SpaceLogic KNX Valve Drive Controller Objects for valve outputs
124 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
20, 70,
120, 170,
220, 270
Command value Valve output X -
Input (X = 1...6)
1-bit 1,001 C, (R), W,
-, -
1-bit input object for the presetting of a switching command value, e.g. of a KNX
room temperature controller. In this case, the telegram polarity is fixed: "0" = Close
valve, "1" = Open valve. The configured valve direction of action is taken into ac-
count in the electrical activation of the valve.
This object is only available for valve outputs configured in the ETS to the com-
mand value data format "Switching (1-bit)".
Function command value presetting
Object no. Function Name Type DPT Flag
21, 71,
121, 171,
221, 271
Command value Valve output X -
Input (X = 1...6)
1 bytes 5,001 C, (R), W,
-, -
1-byte input object for the presetting of a constant command value, e.g. of a KNX
room temperature controller (0...100 % -> 0...255). This object is only available for
valve outputs configured in the ETS to the command value data formats "Constant
(1-bit) with pulse width modulation (PWM)" or "Constant (1-byte) with command
value limiting value". With the command value format "Constant (1-byte) with
pulse width modulation (PWM)", the telegram value is implemented by the actu-
ator with an equivalent pulse-width-modulated switch signal at the valve outputs.
The duty factor is adapted constantly by the actuator, depending on the command
value received. The cycle time can be configured in the ETS. In accordance with
the configured valve direction of action, the output is either energised or deener-
gised, depending on the valve position to be approached. In so doing, the duty
factor is inverted automatically for a deenergised opened drive.
In the command value format "Constant (1-byte) with command value limiting
value", the received constant command value is converted into a switching output
signal, depending on a configured limiting value. The valve drive opens when the
command value reaches the limiting value or exceeds it. A hysteresis is also eval-
uated to prevent constant closing and opening of the actuator for command values
in the area of the limiting value. The valve drive only closes when the command
value undershoots the limiting value minus the configured hysteresis. The conver-
sion of the constant input signal into a switching command value takes place in-
ternally in the device. During processing, the actuator evaluates the converted
command value as if it were a received 1-bit command value. It forwards the
status directly to the appropriate output, taking the configured valve direction of
action into account.
Function: Valve status
SpaceLogic KNX Valve Drive Controller Objects for valve outputs
125 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
22, 72,
122, 172,
222, 272
Feedback valve
command value
Valve output X -
Output (X = 1...6)
1-bit 1,001 C, R, -,T, -
1-bit output object to feed back the active switching command value of a valve
output. In this case, the telegram polarity is fixed: "0" = Valve closed, "1" = Valve
opened.
This object is only available for valve outputs configured in the ETS to the com-
mand value data formats "Switching (1-bit)" or "Constant (1-byte) with command
value limiting value".
It may also occur with such command value outputs that a constant command
value (PWM at the output) is active (e.g. after bus/mains voltage return or a forced
position and emergency operation or manual operation). In this case, the status
object feeds back a "0" if the command value corresponds to "0 %". The object
sends back a "1" when the set command value corresponds to "1...100 %".
The object transmits the current status after bus voltage return and an ETS pro-
gramming operation, possibly after a transmission delay (configurable) has
elapsed.
Function: Valve status
Object no. Function Name Type DPT Flag
23, 73,
123, 173,
223, 273
Feedback valve
command value
Valve output X -
Output (X = 1...6)
1 bytes 5,001 C, R, -,T, -
1-byte output object to feed back the active constant command value of a valve
output (0...100 % -> 0...255).
This object is only available for valve outputs configured in the ETS to the com-
mand value data format "Constant (1-byte) with pulse width modulation (PWM)".
The object transmits the current status after bus voltage return and an ETS pro-
gramming operation, possibly after a transmission delay (configurable) has
elapsed.
Function valve forced position
Object no. Function Name Type DPT Flag
24, 74,
124, 174,
224, 274
forced position Valve output X -
Input (X = 1...6)
1-bit 1,003 C, (R), W,
-, -
1-bit input object for activating and deactivating of a forced position. The telegram
polarity can be configured.
Updates of the object from "Forced position active" to "Forced position active" or
from "Forced position inactive" to "Forced position inactive" produce no reaction.
The status preset via the forced position object is stored internally in the device
after a bus voltage failure and and is restored automatically after a bus and/or
mains voltage return.
Function: Command value monitoring
SpaceLogic KNX Valve Drive Controller Objects for valve outputs
126 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
25, 75,
125, 175,
225, 275
Command value
fault
Valve output X -
Output (X = 1...6)
1-bit 1,005 C, R, -,T, -
1-bit output object to signal a faulty command value (with active command value
monitoring, no command value telegram was received within the monitoring time).
The telegram polarity can be configured.
Immediately after the bus voltage return or an ETS programming operation, the
object "Command value fault" does not transmit the status automatically. A faulty
command value must be detected again (expiry of the monitoring time without a
command value telegram) for the object value to be transmitted. This is also the
case if a saved emergency operation was restored after a device reset.
Function: Command value limit
Object no. Function Name Type DPT Flag
26, 76,
126, 176,
226, 276
Command value
limit
Valve output X -
Input (X = 1...6)
1-bit 1,002 C, (R), W,
-, -
1-bit input object for requirement-orientated activating and deactivating of a com-
mand value limit. The telegram polarity is fixed:
"0" = Command value limit inactive, "1" = Command value limit active. Updates of
the object from "1" to "1" or "0" to "0" do not produce a reaction.
If required, this object is only available for valve outputs configured in the ETS to
the command value data format "Constant (1-byte) with pulse width modulation
(PWM)".
It is possible to have the actuator activate the command value limit automatically
after bus voltage return or an ETS programming operation. The status of the com-
mand value limit is not then automatically tracked in the communication object.
Function: Valve rinsing
Object no. Function Name Type DPT Flag
27, 77,
127, 177,
227, 277
Valve rinsing start
Valve rinsing start /
stop
Valve output X -
Input (X = 1...6)
1-bit 1,003 C, (R), W,
-, -
1-bit input object for starting and stopping valve rinsing. Valve rinsing can be activ-
ated by time or an event using this object. It is also possible, for example, to cas-
cade multiple heating actuators, so that they perform valve rinsing simultaneously
(link of the individual status objects to the input objects of the valve rinsing).
The telegram polarity can be configured. Stopping can be prevented via the object
as an option.
The time of cyclical valve rinsing is restarted as soon as an externally started
valve rinsing operation is stopped by a Stop telegram or by the expiry of the rins-
ing time. Updates of the object from "Start" to "Start" or "Stop" to "Stop" do not
produce a reaction. The length of an elapsing valve rinsing operation or the cycle
time of the cyclical valve rinsing are not restarted by this.
Function: Valve rinsing
SpaceLogic KNX Valve Drive Controller Objects for valve outputs
127 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
28, 78,
128, 178,
228, 278
Valve rinsing status Valve output X -
Output (X = 1...6)
1-bit 1,002 C, R, -,T, -
1-bit output object for status feedback of a valve rinsing operation. The telegram
polarity is fixed: "0" = Valve rinsing inactive, "1" = Valve rinsing active.
The object transmits the current status after bus and mains voltage return and
after an ETS programming operation without a delay.
Function overload / short-circuit identification
Object no. Function Name Type DPT Flag
29, 79,
129, 179,
229, 279
Signal short-circuit /
overload
Valve output X -
Output (X = 1...6)
1-bit 1,005 C, R, -,T, -
1-bit output object to signal an identified overload or a short-circuit at the affected
valve output. The telegram polarity can be configured.
The object always transmits the current status after bus voltage return and an ETS
programming operation after a delay, providing that a delay after bus voltage re-
turn has been configured on the "General" parameter page.
Function combined valve status
Object no. Function Name Type DPT Flag
30, 80,
130, 180,
230, 280
Feedback com-
bined valve status
Valve output X -
Output (X = 1...6)
1 bytes --- C, R, -,T, -
1-byte output object for combined feedback of various items of status information
of a valve output. The bit coding is preset as follows:
Bit 0: Command value status ("0" = OFF, 0 % / "1" = ON, "1...100 %")
Bit 1: Short-circuit ("0" = No short-circuit / "1" = Short-circuit)
Bit 2: Overload ("0" = No overload / "1" = Overload)
Bit 3: Valve rinsing ("0" = No valve rinsing / "1" = Valve rinsing active)
Bit 4: Service mode ("0" = No service mode / "1" = Service mode active)
Bit 5: Manual operation ("0" = No manual op. / "1" Manual op. active)
Bit 6: Forced position ("0" = No forced position / "1" = Forced position active)
Bit 7: Not assigned (always "0")
The object transmits the current status after bus voltage return and an ETS pro-
gramming operation, possibly after a transmission delay (configurable) has
elapsed.
Function: Operating hours counter
Object no. Function Name Type DPT Flag
31, 81,
131, 181,
231, 281
Limit value / start-
ing value operating
hours counter
Valve output X -
Input (X = 1...6)
2 bytes 7,007 C, (R), W,
-, -
2-byte input object for external presetting of a limiting value / starting value of the
operating hours counter of a valve output.
Value range: 0...65535
Function: Operating hours counter
SpaceLogic KNX Valve Drive Controller Objects for valve outputs
128 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
32, 82,
132, 182,
232, 282
Reset operating
hours counter
Valve output X -
Input (X = 1...6)
1-bit 1,015 C, (R), W,
-, -
1-bit input object for resetting the operating hours counter of a valve output ("1" =
Restart, "0" = No reaction).
Function: Operating hours counter
Object no. Function Name Type DPT Flag
33, 83,
133, 183,
233, 283
Value operating
hours counter
Valve output X -
Output (X = 1...6)
2 bytes 7,007 C, (R), -,T,
-
2-byte output object to transmit or read out the current counter level of the operat-
ing hours counter of a valve output.
If the bus voltage should fail, the value of the communication object is not lost and
is actively transmitted to the bus after bus voltage return or an ETS programming
operation. In the as-delivered state, the value is "0".
Function: Operating hours counter
Object no. Function Name Type DPT Flag
34, 84,
134, 184,
234, 284
Operating hours
counter elapsed
Valve output X -
Output (X = 1...6)
1-bit 1,002 C, (R), -,T,
-
1-bit output object to signal that the operating hours counter has elapsed (for-
wards counter = limiting value reached / backwards counter = value "0" reached).
With a message, the object value is actively transmitted to the bus ("1" = message
active / "0" = message inactive).
If there is a device reset, the value of the communication object is not lost and is
actively transmitted to the bus after bus voltage return or an ETS programming op-
eration.

SpaceLogic KNX Valve Drive Controller
Operating modes and operating mode change-
over
129 | MTN6730-0002 11.08.2020
11 Channel-orientated
functional description for
controllers
Six controllers are integrated in the device software, which can be used for single-
room temperature control. This allows the temperature to be set in up to 6 rooms or
room areas to specified setpoints through independent control processes. The
command value outputs of these controllers can be internally linked to the elec-
tronic valve outputs of the actuator, meaning that temperature control and valve ac-
tivation can take place using just one bus device, if required. The use of external
room temperature controllers (e.g. push-button sensors with RTC) is thus not abso-
lutely essential, but is possible as the valve outputs can also be activated individu-
ally via the KNX. The integrated controllers can also transmit command value tele-
grams to the KNX and thus activate other heating actuators or fan coil actuators.
The integrated controllers of the device always work as the main controller. All the
controller functions (e.g. setpoint temperature specification, operating mode
switchover, switchover of the operating mode) are controlled via KNX communica-
tion objects (object controller without its own operating elements), meaning that
controller operation is possible via controller extensions or visualisations. The room
temperature is made available to the integrated controllers via separate communic-
ation objects.
11.1 Operating modes and operating mode
change-over
Introduction
A room temperature controller distinguishes between two different operating
modes. The operating modes specify whether you want the controller to use its
variable to trigger heating systems ("heating" single operating mode) or cooling
systems ("cooling" single operating mode). You can also activate mixed operation,
with the controller being capable of changing over between "Heating" and "Cooling"
either automatically or, alternatively, controlled by a communication object.
In addition, you can establish two-level control operation to control an additional
heating or cooling unit. For two-level feedback control, separate command values
will be calculated as a function of the temperature deviation between the setpoint
and the actual value for the basic and additional levels. The parameter "Operating
mode" in the "Room temperature control -> RTCx - General" parameter branch
specifies the operating mode and, if necessary, enables the additional level(s).
"Heating" or "cooling" single operating modes
In the single "Heating" or "Cooling" operating modes without any additional level,
the controller will always work with one command value. Alternatively, when the ad-
ditional level is enabled, it will use two command values in the configured operating
mode. Depending on the room temperature determined and on the specified set-
point temperatures of the operating modes, the room temperature controller will
automatically decide whether heating or cooling energy is required and calculates
the command value for the heating or cooling system.

SpaceLogic KNX Valve Drive Controller
Operating modes and operating mode change-
over
130 | MTN6730-0002 11.08.2020
"Heating and cooling" mixed operating mode
In the "Heating and cooling" mixed operating mode, the controller is capable of trig-
gering heating and cooling systems. In this connection, you can set the change-
over behaviour of the operating modes...
– "Switchover between heating and cooling" parameter in the "Room temper-
ature control -> RTCx - General" parameter branch set to "Automatic".
In this case, a heating or cooling mode is automatically activated, depend-
ing on the determined room temperature and on the specified setpoint tem-
perature. If the room temperature is within the preset deadband neither
heating nor cooling will take place (both command values = "0"). The com-
munication object "Setpoint temperature" displays the most recently active
setpoint temperature for heating or cooling. If the room temperature is
higher than the cooling setpoint temperature, cooling will take place. If the
room temperature is higher than the heating setpoint temperature, heating
will take place.
When the operating mode is changed over automatically, the information
can be actively sent to the bus via the object "Heating/cooling switchover" to
indicate whether the controller is working in the heating mode ("1" telegram)
or in the cooling mode ("0" telegram). In this case, a telegram will be trans-
mitted immediately on changing from heating to cooling (object value = "0")
or from cooling to heating (object value = "1"), respectively.
The "Cyclical transmission heating/cooling change-over" parameter enables
cyclic transmission (factor > "0" setting) and specifies the cycle time.
With an automatic operating mode change-over, it should be noted that un-
der certain circumstances there will be continuous change-over between
heating and cooling if the deadband is too small. For this reason, you
should, if possible, not set the deadband (temperature difference between
the setpoint temperatures for the comfort heating and cooling modes) below
the default value (2 K).
– "Switchover between heating and cooling" parameter in the "Room temper-
ature control -> RTCx - General" parameter branch set to "Via object".
In this case, the operating mode is controlled via the "Heating/cooling
switchover" object, irrespective of the deadband. This type of change-over
can, for example, become necessary if both heating and cooling should be
carried out through a one-pipe system (heating and cooling system). For
this, the temperature of the medium in the single-pipe system must be
changed via the system control. Afterwards the heating/cooling operating
mode is set via the object (often the single-pipe system uses cold water for
cooling during the summer, hot water for heating during the winter).
The "Heating/cooling switchover" object has the following polarities: "1":
Heating; "0": Cooling. After a reset, the object value will be "0", and the
"Heating/cooling operating mode change-over after reset" set in the ETS will
be activated. You can use the "Heating/cooling operating mode after reset"
parameter to set which mode you want to activate after a reset. For the
"Heating" or "Cooling" settings, the controller will activate the configured
heating/cooling operating mode immediately after the initialisation phase. In
case of parameterisation "Operating mode before reset" the operating mode
which was selected before the reset will be activated.
Setpoint temperatures can be specified for each operating mode in the ETS as part
of configuration. It is possible to configure the setpoints for the "Comfort", "Standby"
and "Night" modes directly (absolute setpoint presetting) or relatively (derivation
from basic setpoint). With absolute setpoint presetting there is no basic setpoint
and also no deadband in the mixed operating mode "Heating and cooling" (if ne-
cessary also with additional level). Consequently, the room temperature controller
SpaceLogic KNX Valve Drive Controller
Control algorithms and calculation of command
values
131 | MTN6730-0002 11.08.2020
cannot control the switchover of the operating mode automatically, which is why, in
this configuration, the setting for the parameter "Switchover between heating and
cooling" is fixed in the ETS to "Via object".
It is not possible to heat and cool at the same time (both command values for heat-
ing and cooling > "0"). With pulse width-modulated command value output (PWM),
the command values are only adjusted by the controller at the end of a PWM cycle.
The controller always recalculates and updates signal telegrams (1-bit) for "heat-
ing" and "cooling" cyclically every 30 seconds. The different update intervals for the
PWM command values and the signal telegrams mean that there may be a brief
overlap of the request for heating or cooling energy by the command values and by
the signal telegrams at the transition between heating and cooling. This overlapping
is corrected automatically at the end of a PWM cycle by adjusting the command
values.
Heating/cooling message
Depending on the set operating mode, separate objects can be used to indicate
whether the controller is currently demanding heating or cooling energy and is thus
actively heating or cooling. As long as the heating command value is > "0", a "1"
telegram will be transmitted through the "Heating" signal object. The signal tele-
gram is only reset when the command value is "0" ("0" telegram is transmitted).
The same applies to the signal object for cooling.
The signal objects can be enabled by the "Heating message" or "Cooling message"
parameters in the "Room temperature control -> RTCx - General -> RTCx - Com-
mand value and status output" parameter branch. The control algorithm controls
the signal objects. Please note that the command values are recalculated every 30
s, thus updating the signal objects.
With pulse width-modulated command value output (PWM), the command values
are only adjusted by the controller at the end of a PWM cycle. The different update
intervals for the PWM command values and the signal telegrams mean that there
may be a brief overlap of the request for heating or cooling energy by the command
values and by the signal telegrams at the transition between heating and cooling.
This overlapping is corrected automatically at the end of a PWM cycle by adjusting
the command values.
It should be noted that, with a 2-point feedback control, the signal objects for heat-
ing and cooling will already become active as soon as the temperature falls short of
the temperature setpoint of the active operating mode in case of heating or ex-
ceeds the temperature setpoint in case of cooling. In this case, the configured hys-
teresis is not taken into account.
The optional floor temperature limit does not influence the "Heating" message tele-
gram. If the floor temperature exceeds the set limiting value, only the command
value is switched off. In this case, the "Heating" message remains active.
11.2 Control algorithms and calculation of
command values
Introduction
To facilitate convenient temperature control in living or business spaces a specific
control algorithm which controls the installed heating or cooling systems is re-
quired. Taking account of the preset temperature setpoints and the actual room
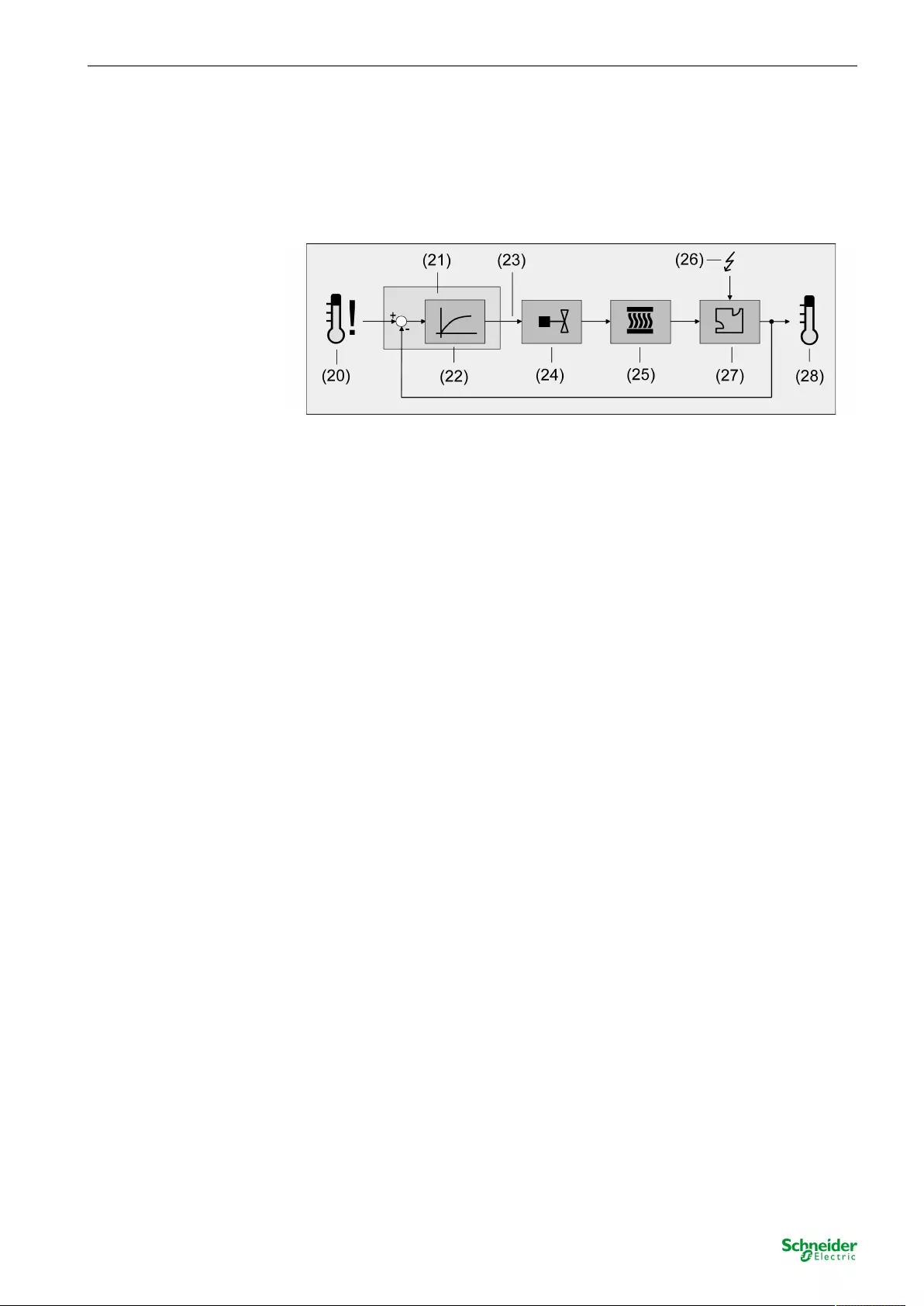
SpaceLogic KNX Valve Drive Controller
Control algorithms and calculation of command
values
132 | MTN6730-0002 11.08.2020
temperature, the controller thus determines command values which trigger the
heating or the cooling system. The control system (control circuit) consists of a
room temperature controller, a valve drive or an actuator with switching output sig-
nals (e.g. heating actuator when ETD electrothermal drives are used), the actual
heating or cooling element (e.g. radiator or cooling ceiling) and of the room. This
results in a controlled system (see figure 30).
Image30: Controlled system of single-room temperature control
(20) Setpoint temperature specification
(21) Room temperature controller
(22) Control algorithm
(23) Command value
(24) Valve control (valve drive, ETD, heating actuator, ...)
(25) Heat / cold exchanger (radiator, cooling ceiling, FanCoil, ...)
(26) Fault variable (sunlight penetration, outdoor temperature, illumination sys-
tems, ...)
(27) Room
(28) Actual temperature (room temperature)
The controller evaluates the actual temperature (28) and compares it with the spe-
cified setpoint temperature (20). With the aid of the selected control algorithm (22),
the command value (23) is then calculated from the difference between the actual
and the setpoint temperature. The command value controls valves or fans for heat-
ing or cooling systems (24), meaning that heating or cooling energy in the heat or
cold exchangers (25) is passed into the room (27). Regular readjustment of the
command value means that the controller is able to compensate for setpoint / ac-
tual temperature differences caused by external influences (26) in the control cir-
cuit. In addition, the flow temperature of the heating or cooling circuit influences the
control system which necessitates adaptations of the variable.
The room temperature controller facilitates either proportional/integral (PI) feed-
back control as a continuously working or switching option, or, alternatively, switch-
ing 2-point feedback control. In some practical cases, it can become necessary to
use more than one control algorithm. For example, in bigger systems using floor
heating, one control circuit which solely triggers the floor heating can be used to
keep the latter at a constant temperature. The radiators on the wall, and possibly
even in a side area of the room, will be controlled separately by an additional level
with its own control algorithm. In such cases, distinction must be made between
the different types of control, as floor heating systems, in most cases, require con-
trol parameters which are different to those of radiators on the wall, for example. It
is possible to configure up to four independent control algorithms in two-level heat-
ing and cooling operation.
The command values calculated by the control algorithm are output via the "Heat-
ing command value" or "Cooling command value" communication objects. Depend-
ing on the control algorithm selected for the heating and/or cooling mode, the
format of the command value objects is, among other things, also specified. In this

SpaceLogic KNX Valve Drive Controller
Control algorithms and calculation of command
values
133 | MTN6730-0002 11.08.2020
way, 1-bit or 1-byte actuating objects can be created. The control algorithm is spe-
cified by the parameters "Type of heating control" or "Type of cooling control" in the
"Room temperature control -> RTCx - General" parameter branch and, if neces-
sary, also with a distinction of the basic and additional stages.
Continuous PI control
PI control is an algorithm which consists of a proportional part and an integral part.
Through the combination of these control properties, you can obtain room temper-
ature control as quickly and precisely as possible without or only with low devi-
ations.
When you use this algorithm, the room temperature controller will calculate a new
continuous command value in cycles of 30 seconds and send it to the bus via a
1-byte value object, if the calculated command value has changed by a specified
percentage. You can use the "Automatic transmission on change by…" parameter
in the "Room temperature control -> RTCx - General -> RTCx - Command value
and status output" parameter branch to set the change interval in percent.
Image31: Continuous PI control
An additional heating or cooling level as PI control works in the same way as the PI
control of the basic level, with the exception that the setpoint will shift, taking ac-
count of the configured level width.
Switching PI control
With this type of feedback control, the room temperature will also be kept constant
by the PI control algorithm. Taking the mean value for a given time, the same be-
haviour of the control system will result as you would obtain with a continuous con-
troller. The difference compared with continuous feedback control is only the way
how the command value is output. The command value calculated by the algorithm
in cycles of every 30 seconds is internally converted into a pulse width-modulated
(PWM) command value signal and sent to the bus via a 1-bit switching object after
the cycle time has elapsed. The mean value of the command value signal resulting
from this modulation is a measure for the averaged position of the control valve,
thus being a reference to the room temperature set, taking account of the cycle
time which you can set through the "Cycle time of the switching command value…"
parameter in the "Room temperature control -> RTCx - General -> RTCx - Com-
mand value and status output" parameter branch.
A shift of the mean value, and thus a change in the heating capacity, can be ob-
tained by changing the duty factor of the switch-on and switch-off pulses of the
command value signal. The duty factor will be adapted by the regulator only at the
end of a time period, depending on the variable calculated. This applies to any
change of the command value, regardless of what the ratio is by which the com-
mand value changes (the "Automatic transmission on change by…" and "Cycle
time for automatic transmission..." parameters will have no function in this case).
Each command value calculated last during an active time period will be converted.
Even after you have changed the setpoint temperature, for example, by switching
over the operating mode, the command value will still be adapted after the end of

SpaceLogic KNX Valve Drive Controller
Control algorithms and calculation of command
values
134 | MTN6730-0002 11.08.2020
an active cycle time. The diagram below shows the output command value switch-
ing signal according to the internally calculated command value (first of all, a com-
mand value of 30 %, then of 50 %, with the command value output not being inver-
ted).
Image32: Switching PI control
For a command value of 0 % (permanently off) or of 100 % (permanently on), a
command value telegram corresponding to the command value ("0" or "1") will al-
ways be sent after a cycle time has elapsed.
For switching PI control, the controller will always use continuous command values
for internal calculation. Such continuous values can additionally be sent to the bus
via a separate 1-byte value object, for example, as status information for visualisa-
tion purposes (if necessary, also separately for the additional levels). The status
value objects will be updated at the same time as the command value is output and
will only take place after the configured cycle time has elapsed. The parameters
"automatic transmission on change by..." and "Cycle time for automatic transmis-
sion..." parameters will have no function in this case. An additional heating or cool-
ing level as switching PI control works in the same way as the PI control of the ba-
sic stage, with the exception that the setpoint will shift, taking account of the con-
figured level width. All PWM control options will use the same cycle time.
Cycle time:
The pulse-width-modulated command values are mainly used for activating electro-
thermal drives (ETD). In this regard, the room temperature controller sends the
switching command value telegrams to a actuator equipped with semiconductor
switching elements to which the drives are connected (e.g. heating actuator). By
setting the cycle time of the PWM signal on the controller, you can adapt the feed-
back control to the drives used. The cycle time sets the switching frequency of the
PWM signal and allows adaptation to the adjusting cycle times of the valve drives
used (the adjusting time it takes the drive to bring the valve from its completely
closed to its completely opened position). In addition to the adjusting cycle time,
take account of the dead time (the time in which the actuators do not show any re-
sponse when being switched or off). If different actuators with different adjusting
cycle times are used, take account of the longest of the times. Always note the in-
formation given by the manufacturers of the actuators.
During cycle time configuration, a distinction can always be made between two
cases...
Case 1: Cycle time > 2 x adjusting cycle time of the electrothermal drives used
(ETA)
In this case, the switch-on or switch-off times of the PWM signal are long enough
for the actuators to have sufficient time to fully open or fully close within a given
time period.
Advantages:
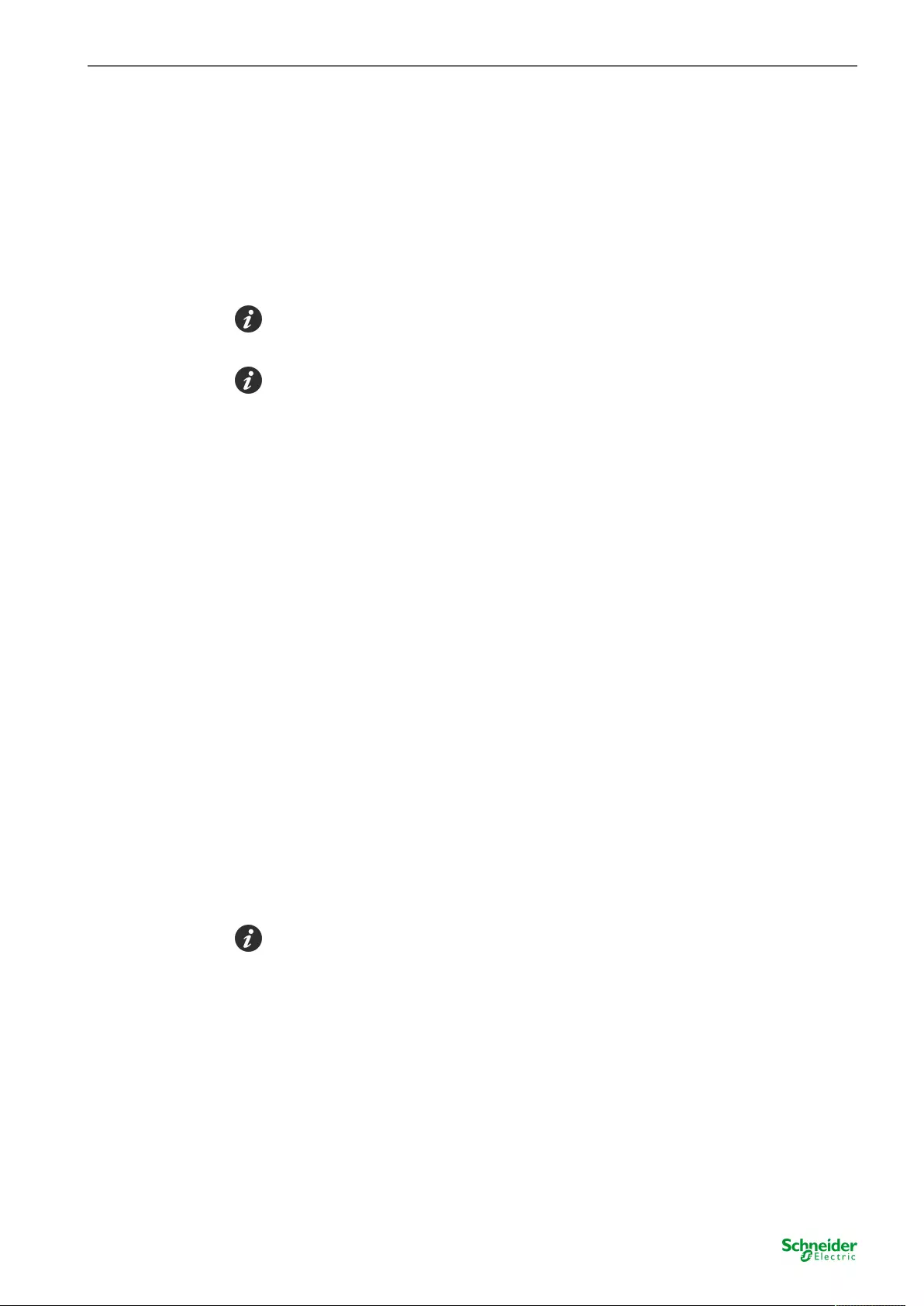
SpaceLogic KNX Valve Drive Controller
Control algorithms and calculation of command
values
135 | MTN6730-0002 11.08.2020
The desired mean value for the command value and thus for the required room
temperature will be set relatively precisely, even for several actuators triggered at
the same time.
Disadvantages:
It should be noted, that, due to the full valve lift to be continuously 'swept', the life
expectancy of the actuators can diminish. For very long cycle times (> 15 minutes)
with less sluggishness in the system, the heat emission into the room, for example,
in the vicinity of the radiators, can possibly be non-uniform and be found disturbing.
This setting is recommended for sluggish heating systems (such as underfloor
heating).
Even for a bigger number of triggered actuators, maybe of different types, this set-
ting can be recommended to be able to obtain a better mean value of the adjusting
travels of the valves.
Case 2: Cycle time < adjusting cycle time of the electrothermal drives used (ETA)
In this case, the switch-on or switch-off times of the PWM signal are too short for
the actuators to have enough time to fully open or fully close within a given period.
Advantages:
This setting ensures continuous water flow through the radiators, thus facilitating
uniform heat emission into the room.
If only one valve drive is triggered the controller can continuously adapt the com-
mand value to compensate the mean value shift caused by the short cycle time,
thus setting the desired room temperature.
Disadvantages:
If more than one drive is triggered at the same time the desired mean value will be-
come the command value, which will result in a very poor adjustment of the re-
quired room temperature, or in adjustment of the latter with major deviations, re-
spectively.
The continuous flow of water through the valve, and thus the continuous heating of
the drives causes changes to the dead times of the drives during the opening and
closing phase. The short cycle time and the dead times means that the required
variable (mean value) is only set with a possibly large deviation. For the room tem-
perature to be regulated constantly after a set time, the controller must continually
adjust the command value to compensate for the mean value shift caused by the
short cycle time. Usually, the control algorithm implemented in the controller (PI
control) ensures that control deviations are compensated.
This setting is recommended for quick-reaction heating systems (such as surface
radiators).
2-point feedback control
2-point feedback control represents a very simple temperature control. For this
type of feedback control, two hysteresis temperature values are set. The actuators
are triggered by the controller via switch-on and switch-off command value com-
mands (1-bit type). A continuous variable is not calculated for this type of control.
The room temperature is also evaluated by this type of control in cycles every 30
seconds. Thus the command values change, if required, only at these times. The
disadvantage of a continuously varying temperature as a result of this feedback
control option is in contrast with the advantage of this very simple 2-point room
temperature control. For this reason, quick-reaction heating or cooling systems
should not be triggered by a 2-point feedback control system, for this can lead to

SpaceLogic KNX Valve Drive Controller
Control algorithms and calculation of command
values
136 | MTN6730-0002 11.08.2020
very high overshooting of the temperature, thus resulting in loss of comfort. When
presetting the hysteresis limiting values, you should distinguish between the oper-
ating modes.
"Heating" or "cooling" single operating modes:
In heating mode, the controller will turn on the heating when the room temperature
has fallen below a preset limit. In heating mode, the feedback control will only turn
off the heating once a preset temperature limit has been exceeded. In cooling
mode, the controller will turn on the cooling system when the room temperature
has exceeded a preset limit. The control system will only turn off the cooling sys-
tem once the temperature has fallen below a preset limit. In this connection, the
command value "1" or "0" will be output, depending on the switching status, if the
temperature exceeds or falls below the hysteresis limits.
The hysteresis limits of both operating modes can be configured in the ETS.
It has to be pointed out that the message objects for heating and cooling already
become active as soon as the temperature falls short of the temperature setpoint of
the active operating mode in case of heating or exceeds the temperature setpoint in
case of cooling. In this case the hysteresis is not being considered.
The following two images each show a 2-point feedback control for the individual
operating modes "Heating" (see figure 33)or "Cooling" (see figure 34). The images
take two temperature setpoints, one-stage heating or cooling and non-inverted
command value output into account.
Image33: 2-point feedback control for the single "Heating" operating mode
Image34: 2-point feedback control for the single "Cooling" operating mode
An additional 2-point feedback control heating or cooling level works exactly the
same as the 2-point feedback control of the basic level. The difference is that the
setpoint and the hysteresis values will shift by taking into account the configured
level offset.
"Heating and cooling" mixed operating mode:
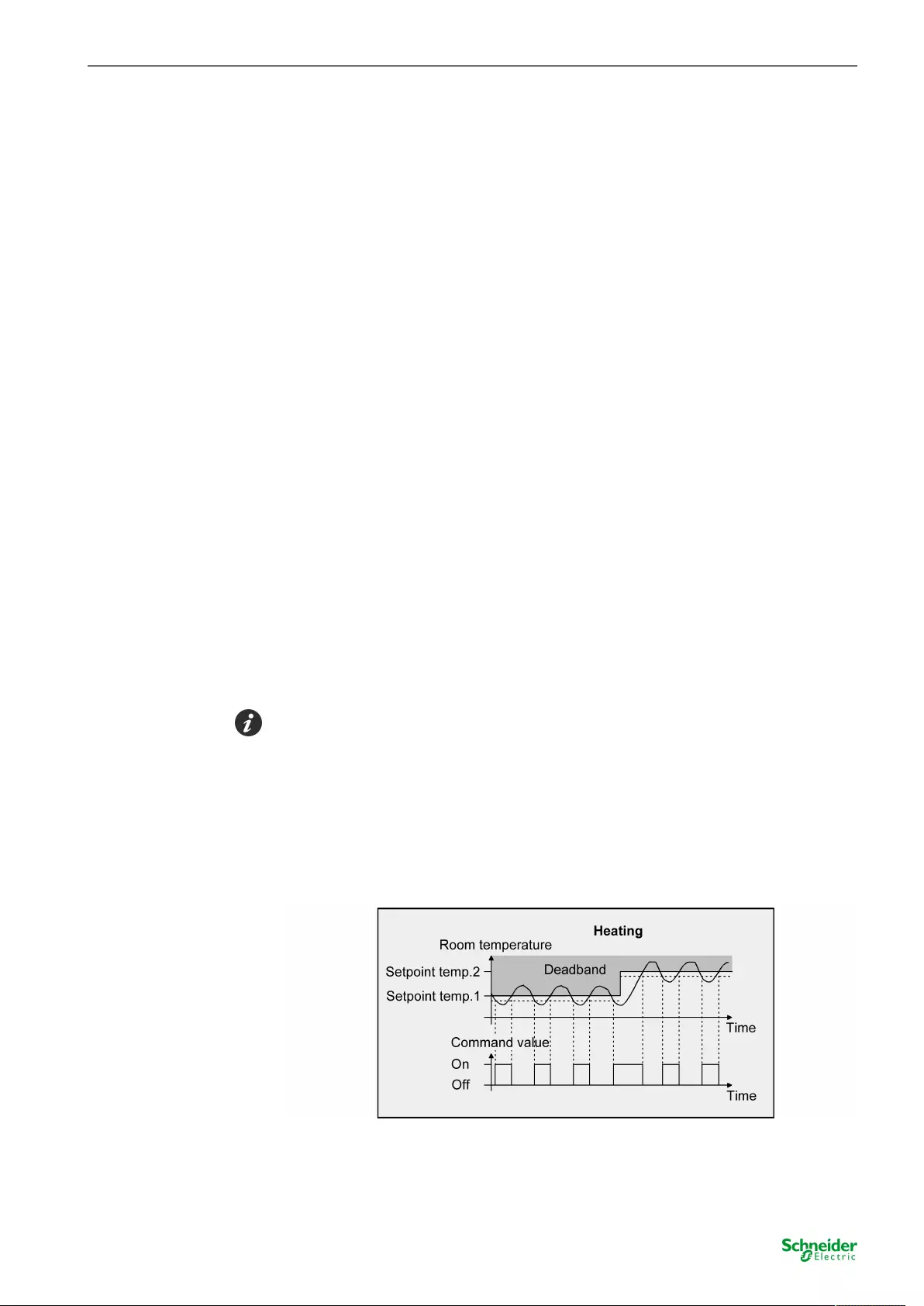
SpaceLogic KNX Valve Drive Controller
Control algorithms and calculation of command
values
137 | MTN6730-0002 11.08.2020
In mixed operation, a distinction is made whether the change-over between heating
and cooling is to be effected automatically or in a controlled way through the ob-
ject...
– With automatic operating mode change-over, in the heating mode the con-
troller will turn on the heating when the room temperature has fallen below a
preset hysteresis limit. In this case, as soon as the room temperature ex-
ceeds the setpoint of the current operating mode, the feedback control will
turn off the heating in the heating mode. In the same way, in cooling mode,
the controller will turn on the cooling system when the room temperature
has exceeded a preset hysteresis limit. As soon as the room temperature
falls below the setpoint of the current operating mode, the feedback control
will turn off the cooling system in the cooling mode. Thus, in mixed opera-
tion, there is no upper hysteresis limit for heating or no lower one for cool-
ing, respectively, for these values would be in the deadband. Within the
deadband, neither heating nor cooling will take place.
– With an operating mode switchover via the object, in heating mode, the con-
troller will turn on the heating when the room temperature has fallen below a
preset hysteresis limit. The feedback control will only turn off the heating in
the heating mode once the preset upper hysteresis limit has been ex-
ceeded. In the same way, in cooling mode, the controller will turn on the
cooling system when the room temperature has exceeded a preset hyster-
esis limit. The feedback control will only turn off the cooling system in the
cooling mode once the temperature has fallen below the preset lower hys-
teresis limit. As with the individual operating modes of heating or cooling,
there are two hysteresis limits per operating mode. Although there is a
deadband for the calculation of the temperature setpoints for cooling, it has
no influence on the calculation of the two-point control value, as the operat-
ing mode is switched over "manually" through the corresponding object.
Within the hysteresis spans, it thus will be possible to request heating or
cooling energy for temperature values that are located within the deadband.
Also, with an automatic operating mode change-over, an upper hysteresis limiting
value for heating and a lower hysteresis limiting value for cooling can be configured
in the ETS for 2-point control, although they have no function.
The following two images show 2-point feedback control for the mixed operating
mode "Heating and cooling", distinguishing between heating mode (see figure 35)
and cooling mode (see figure 36). The images take two temperature setpoints, a
non-inverted command value output and an automatic operating mode switchover
into account. When the operating mode is switched over via the object, an upper
hysteresis for heating and a lower hysteresis for cooling are active.
Image35: 2-point feedback control for mixed "Heating and cooling" mode with act-
ive heating mode.
SpaceLogic KNX Valve Drive Controller Adapting the control algorithms
138 | MTN6730-0002 11.08.2020
Image36: 2-point feedback control for mixed "Heating and cooling" mode with act-
ive cooling operation.
The command value "1" or "0" will be output, depending on the switching status, if
the temperature exceeds or falls below the hysteresis limits or the setpoints.
It has to be pointed out that the message objects for heating and cooling will
already become active as soon as the temperature falls short of the temperature
setpoint of the active operating mode in case of heating or exceeds the temperat-
ure setpoint in case of cooling. In this case the hysteresis is not being considered.
An additional 2-point feedback control heating or cooling level works exactly the
same as the 2-point feedback control of the basic level. The difference is that the
setpoint and the hysteresis values will shift by taking into account the configured
level offset.
11.3 Adapting the control algorithms
Adapting the PI control
In a building, different systems can be installed which heat up or cool down a room.
One option is to uniformly heat or cool the surroundings via heat transfer media
(preferably water or oil) in connection with room air convection. Such systems are
used, for example, with wall mounted heaters, underfloor heating or cooling ceil-
ings. Alternatively or additionally forced air systems may heat or cool rooms. In
most cases such systems are electrical forced hot air systems, forced cool air sys-
tems or refrigerating compressors with fan. Due to the direct heating of the room air
such heating and cooling systems work quite swiftly.
The control parameters need to be adjusted so that the PI control algorithm may
efficiently control all common heating and cooling systems thus making the room
temperature control work as fast as possible and without deviation. Certain factors
can be adjusted with a PI control that can influence the control behaviour quite sig-
nificantly at times. For this reason, the room temperature controller can be set to
predefined control parameters for the most common heating and cooling systems.
In case the selection of a corresponding heating or cooling system does not yield a
satisfactory result with the default values, the adaptation can optionally be optim-
ised using control parameters.
Predefined control parameters for the heating or cooling stage and, if applicable,
also for the additional stages are adjusted via the "type of heating" or "type of cool-
ing" parameters. These fixed values correspond to the practical values of a prop-
erly planned and executed air conditioning system and will result in an ideal beha-
viour of the temperature control. The heating and cooling types shown in the fol-
lowing tables can be set for heating and cooling operation.
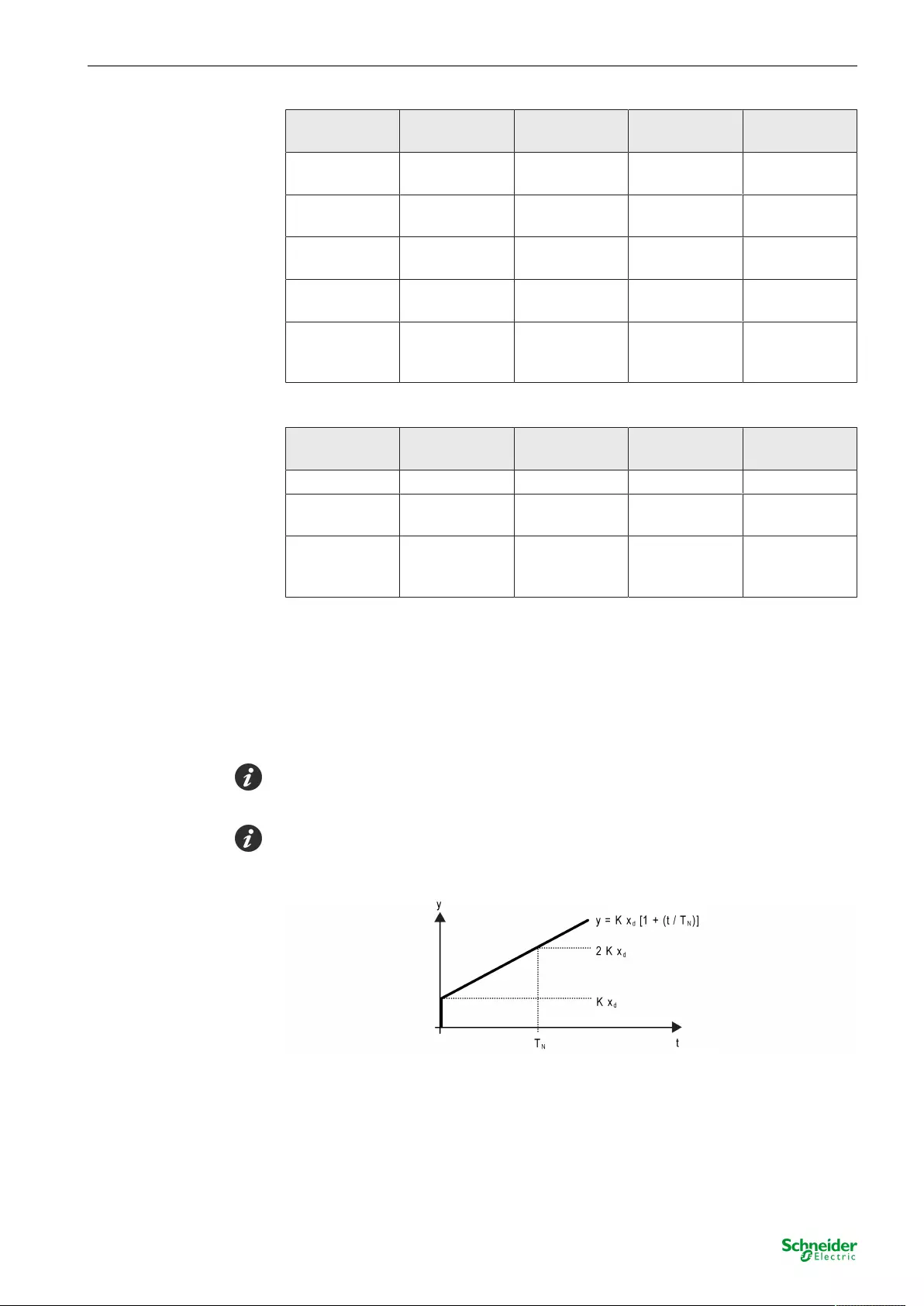
SpaceLogic KNX Valve Drive Controller Adapting the control algorithms
139 | MTN6730-0002 11.08.2020
Type of heating Proportional
range (preset)
Reset time
(preset)
Recommended
PI control type
Recommended
PWM cycle time
Heat water
heating
5 Kelvin 150 minutes Continuous /
PWM
15 min.
Underfloor
heating
5 Kelvin 240 minutes PWM 15-20 min.
Electrical heat-
ing
4 Kelvin 100 minutes PWM 10-15 min.
Fan
coil unit
4 Kelvin 90 minutes Continuous ---
Split unit (split
climate control
unit)
4 Kelvin 90 minutes PWM 10-15 min.
Predefined control parameters and recommend control types for heating systems
Cooling type Proportional
range (preset)
Reset time
(preset)
Recommended
PI control type
Recommended
PWM cycle time
Cooling ceiling 5 Kelvin 240 minutes PWM 15-20 min.
Fan
coil unit
4 Kelvin 90 minutes Continuous ---
Split unit (split
climate control
unit)
4 Kelvin 90 minutes PWM 10-15 min.
Predefined control parameters and recommend control types for cooling systems
If the "Type of heating" or "Type of cooling" parameters are set to "Via control para-
meters", it is possible to adjust the control parameters manually. The feedback
control may be considerably influenced by presetting the proportional range for
heating or for cooling (P component) and the reset time for heating or for cooling (I
component).
Even small adjustments of the control parameters will lead to noticeable different
control behaviour.
The adaptation should start with the control parameter setting for the corresponding
heating or cooling system according to the specified fixed values mentioned in the
above tables.
Image37: Function of the command value of a PI control
y: Command value
xd: control difference (xd = xset - xact)
P = 1/K : Configurable proportional band
K = 1/P : Gain factor
TN: parameterisable reset time
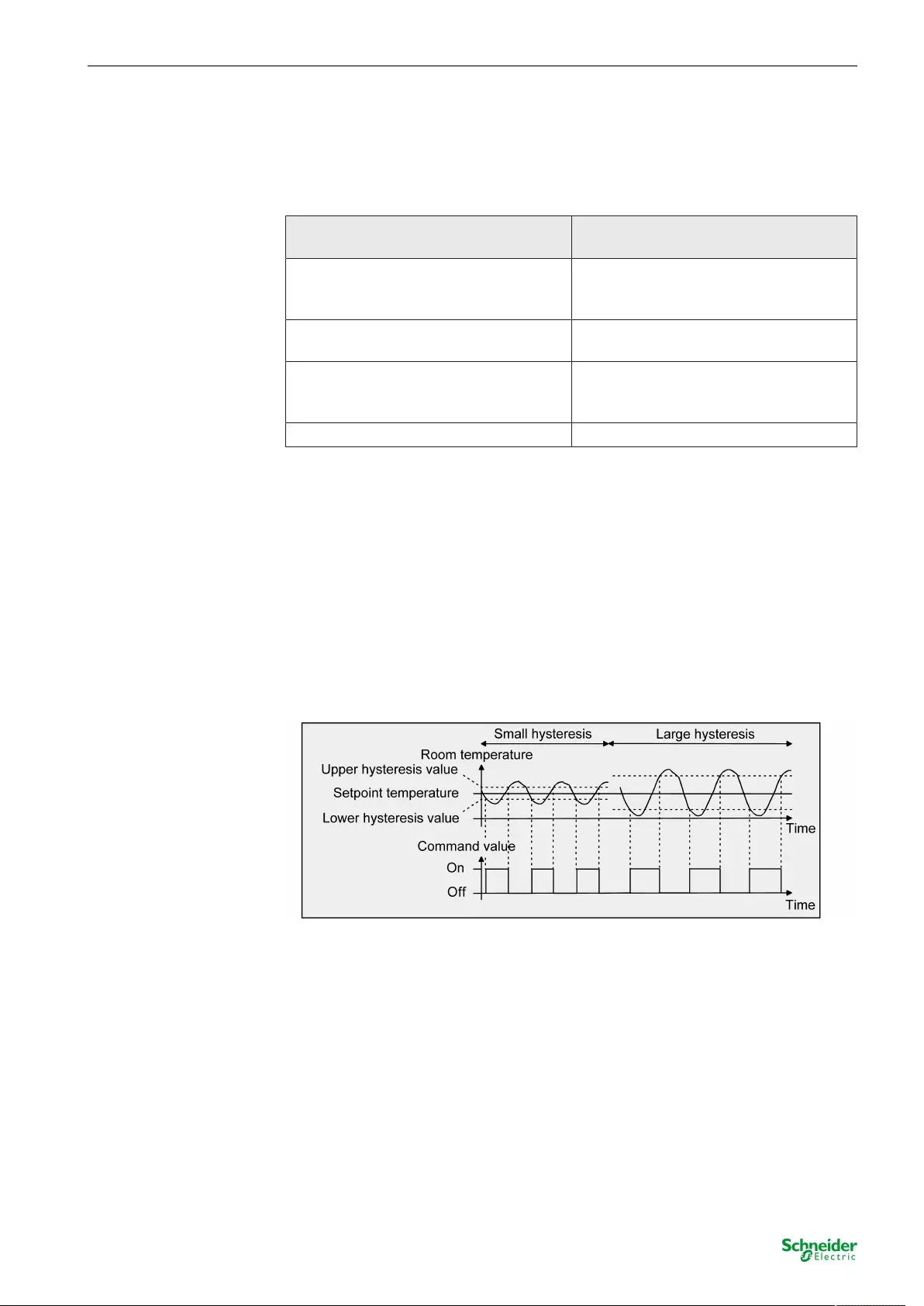
SpaceLogic KNX Valve Drive Controller Operating mode switchover
140 | MTN6730-0002 11.08.2020
PI control algorithm: Command value y = K xd [1 + (t / TN)]
Deactivation of the reset time (setting = "0") ->
P control algorithm: Command value y = K xd
Parameter
setting
Effect
P: Small proportional
range
Large overshoot in case of setpoint
changes (possibly permanently), quick
adjustment to the setpoint
P: Large proportional
range
no (or small) overshooting but slow ad-
justment
TN: Short reset time Fast compensation of control deviations
(ambient conditions), risk of permanent
oscillations
TN: Long reset time Slow compensation of control deviations
Effects of the settings for the control parameters
Adapting the 2-point feedback control
2-point feedback control represents a very simple temperature control. For this
type of feedback control, two hysteresis temperature values are set. The upper and
lower temperature hysteresis limits can be adjusted via parameters. It has to be
considered that…
– A small hysteresis will lead to smaller temperature variations but to a higher
KNX bus load.
– A large hysteresis switches less frequently but will cause uncomfortable
temperature variations.
Image38: Effects of the hysteresis on the switching behaviour of a 2-point feed-
back control command value
11.4 Operating mode switchover
Introduction - The operating modes
The room temperature controller has various operating modes. The selection of
these modes will, for example, facilitate the activation of different temperature set-
points, depending on the presence of a person, on the state of the heating or cool-
ing system, on the time of the day, or on the day of the week. The following operat-
ing modes can be distinguished…

SpaceLogic KNX Valve Drive Controller Operating mode switchover
141 | MTN6730-0002 11.08.2020
– Comfort mode 0
Comfort mode is usually activated if persons are in a room, and the room
temperature should, for this reason, be adjusted to an adequately conveni-
ent value. The switchover to this operating mode can take place either by
specifying an operating mode via the operating mode switchover or with
presence control, for example, using a PIR presence detector on the wall or
a ceiling mounted presence detector.
– Standby mode 1
If a room is not used during the day because persons are absent, you can
activate the Standby mode. Thereby, you can adjust the room temperature
on a standby value, thus to save heating or cooling energy, respectively.
– Night operation 2
During the night hours or during the absence of persons for a longer time, it
mostly makes sense to adjust the room temperature to lower values for
heating systems (e.g. in bedrooms). In this case, cooling system can be set
to higher temperature values, if air conditioning is not required (e.g. in of-
fices). For this purpose, you can activate the Night mode.
– Frost/heat protection mode ¾ / 4
Frost protection will be required if, for example, the room temperature must
not fall below critical values while the window is open. Heat protection can
be required where the temperature rises too much in an environment which
is always warm, mainly due to external influences. In such cases, you can
activate the Frost/heat protection operating mode and prescribe some tem-
perature setpoint of its own for either option, depending on whether "Heat-
ing" or "Cooling" has been selected, to prevent freezing or overheating of
the room.
– Comfort extension (temporary Comfort mode) y
You can activate the comfort extension from the night or frost/heat protec-
tion mode (not triggered by the "Window status" object) and use it to adjust
the room temperature to a comfort value for some time if, for example, there
are people in the room during the night hours. This mode can exclusively be
activated via the presence object. The comfort extension option will be auto-
matically deactivated after a definable time has elapsed, or by receiving a
presence object value = "0". You cannot retrigger this extension.
You can assign your own setpoint temperature to the "Heating" or "Cooling" operat-
ing modes for each operating mode.
Operating mode switchover
The operating modes can be switched over by means of the 1-bit communication
object available separately for each operating mode, or alternatively, by means of
the KNX operating mode objects. The "Operating mode change-over" parameter in
the "Room temperature control -> CTC general" parameter branch specifies the
switching method as follows...
– Via switching (4 x 1 bit): There is a separate 1-bit change-over object for
each operating mode. Each of these objects allows the current operating
mode to be specified, depending on the priority. Taking a specified priority
into account, a specific switchover hierarchy will result from the operating
mode switchover by the objects, a distinction being made between pres-
ence detection by the presence button (see figure 39) or the presence de-
tector (see figure 40). In addition, the status of the window in the room can
be evaluated using the "Window status" object, meaning that, when the win-
dow is open, the controller can switch to Frost/heat protection mode, irre-
spective of the set operating mode, in order to save energy .
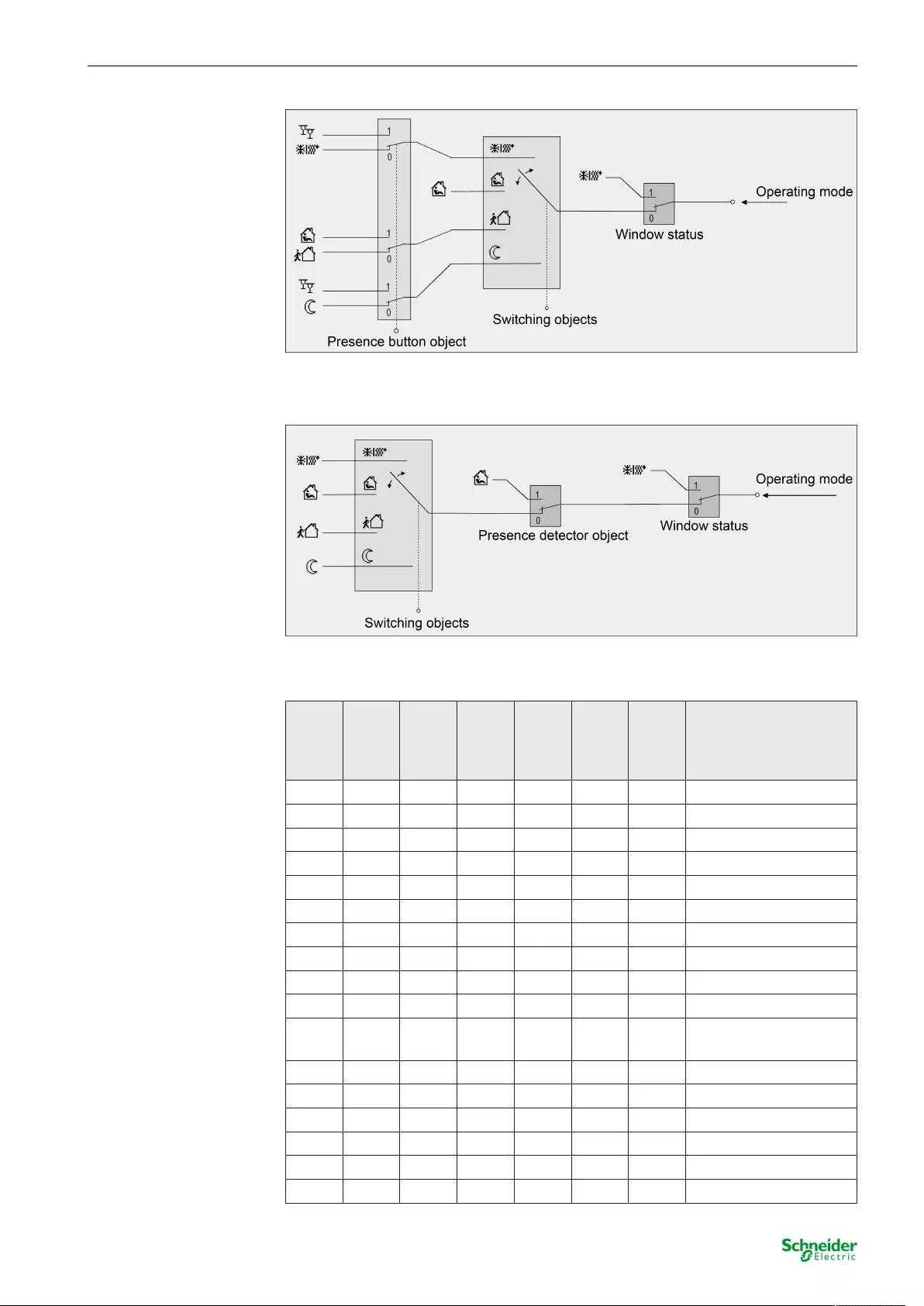
SpaceLogic KNX Valve Drive Controller Operating mode switchover
142 | MTN6730-0002 11.08.2020
Image39: Operating mode change-over through 4 x 1-bit objects with presence
button
Image40: Operating mode change-over through 4 x 1-bit objects with presence
detector
Obj.
¾| 4
Obj.
0
Obj.
1
Obj.
2
Obj.
Win-
dow
status
Pres.
button
Pres.
de-
tector
Resulting operating
mode
1 X X X 0 0 - Frost/heat protection
0 1 X X 0 0 - Comfort mode
0 0 1 X 0 0 - Standby mode
0 0 0 1 0 0 - Night operation
0 0 0 0 0 0 - no change
X X X X 1 X - Frost/heat protection
1 X X X 0 1 - Comfort extension
0 1 X X 0 1 - Comfort mode
0 0 1 X 0 1 - Comfort mode
0 0 0 1 0 1 - Comfort extension
0 0 0 0 0 1 - Comfort mode/exten-
sion *
1 X X X 0 - 0 Frost/heat protection
0 1 X X 0 - 0 Comfort mode
0 0 1 X 0 - 0 Standby mode
0 0 0 1 0 - 0 Night operation
0 0 0 0 0 - 0 no change
X X X X 1 - X Frost/heat protection
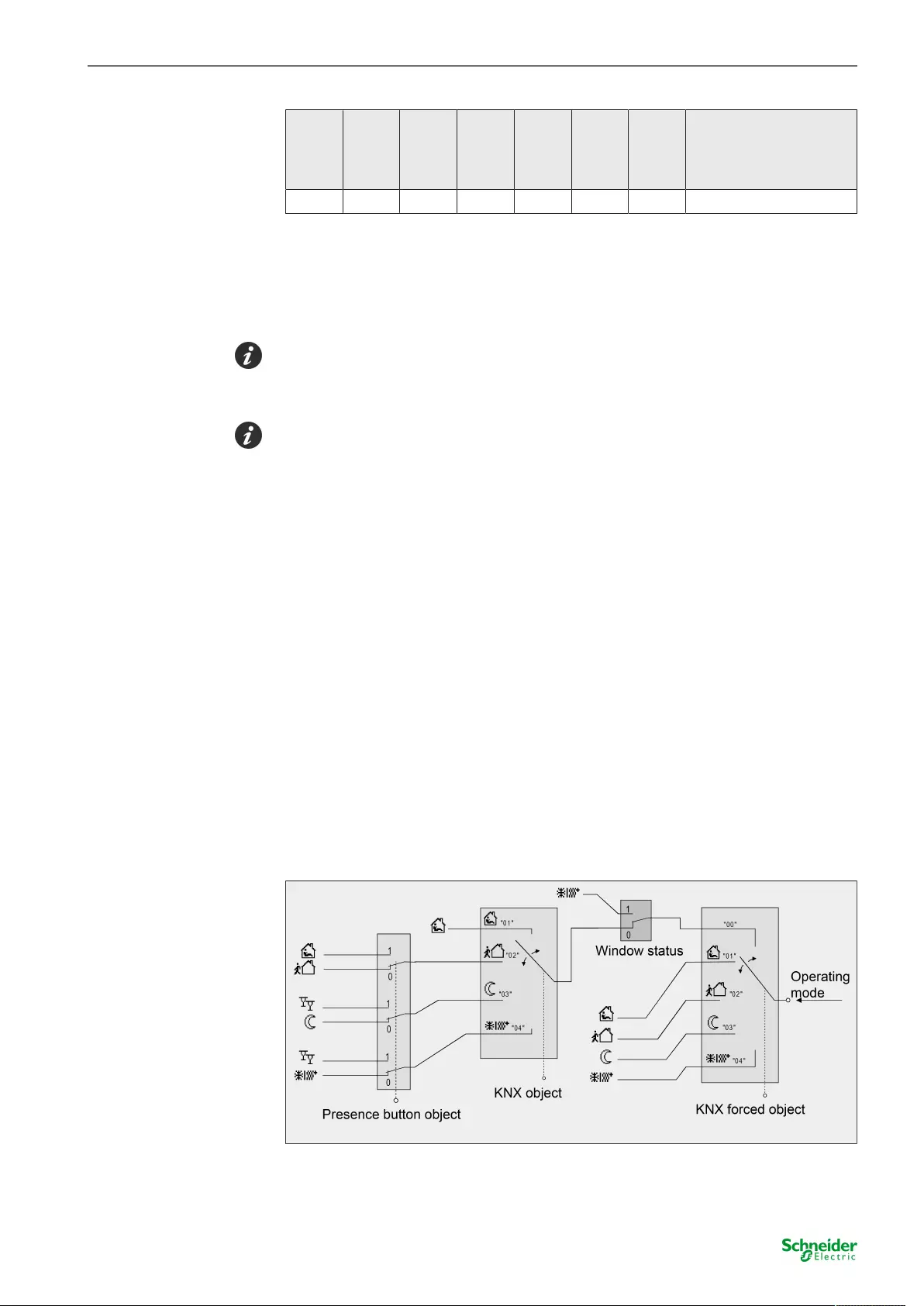
SpaceLogic KNX Valve Drive Controller Operating mode switchover
143 | MTN6730-0002 11.08.2020
Obj.
¾| 4
Obj.
0
Obj.
1
Obj.
2
Obj.
Win-
dow
status
Pres.
button
Pres.
de-
tector
Resulting operating
mode
X X X X 0 - 1 Comfort mode
Status of the communication objects and the resulting operating mode
X: Status irrelevant
-: Not possible
*: Dependent on the last active operating mode.
After bus voltage recovery or an ETS programming operation (controller reset), the
object which corresponds to the selected operating mode will be updated and its
value actively transmitted to the bus, if the "Transmit" flag has been set.
In parameterisation of a presence button: the presence object will be active ("1") for
the period of an comfort extension. The presence object will be automatically de-
leted ("0") if the comfort extension is stopped after the extension time has elapsed,
or if the operating mode was changed by the switchover objects. The controller
therefore automatically resets the status of the presence button when an object is
received via the operating mode objects.
– Operating mode change-over through "value (1 byte)"
There is a common 1-byte switchover object for all operating modes. Dur-
ing the running time, the operating mode can be changed over through this
value object immediately after the receipt of only one telegram. In this con-
nection, the value received will set the operating mode. In addition, a
second 1-byte object is available which, by forced control and through a
higher level, can set an operating mode, irrespective of any other
switchover options. Both 1-byte objects have been implemented according
to the KNX specification.
Taking the priority into account, a specific switchover hierarchy will result
from the operating mode switchover by the objects, a distinction being
made between presence detection by the presence button (see figure 41)
or the presence detector (see figure 42). In addition, the status of the win-
dow in the room can be evaluated using the "Window status" object, mean-
ing that, when the window is open, the controller can switch to Frost/heat
protection mode, irrespective of the set operating mode, in order to save
energy .
Image41: Operating mode switchover through KNX object with presence button
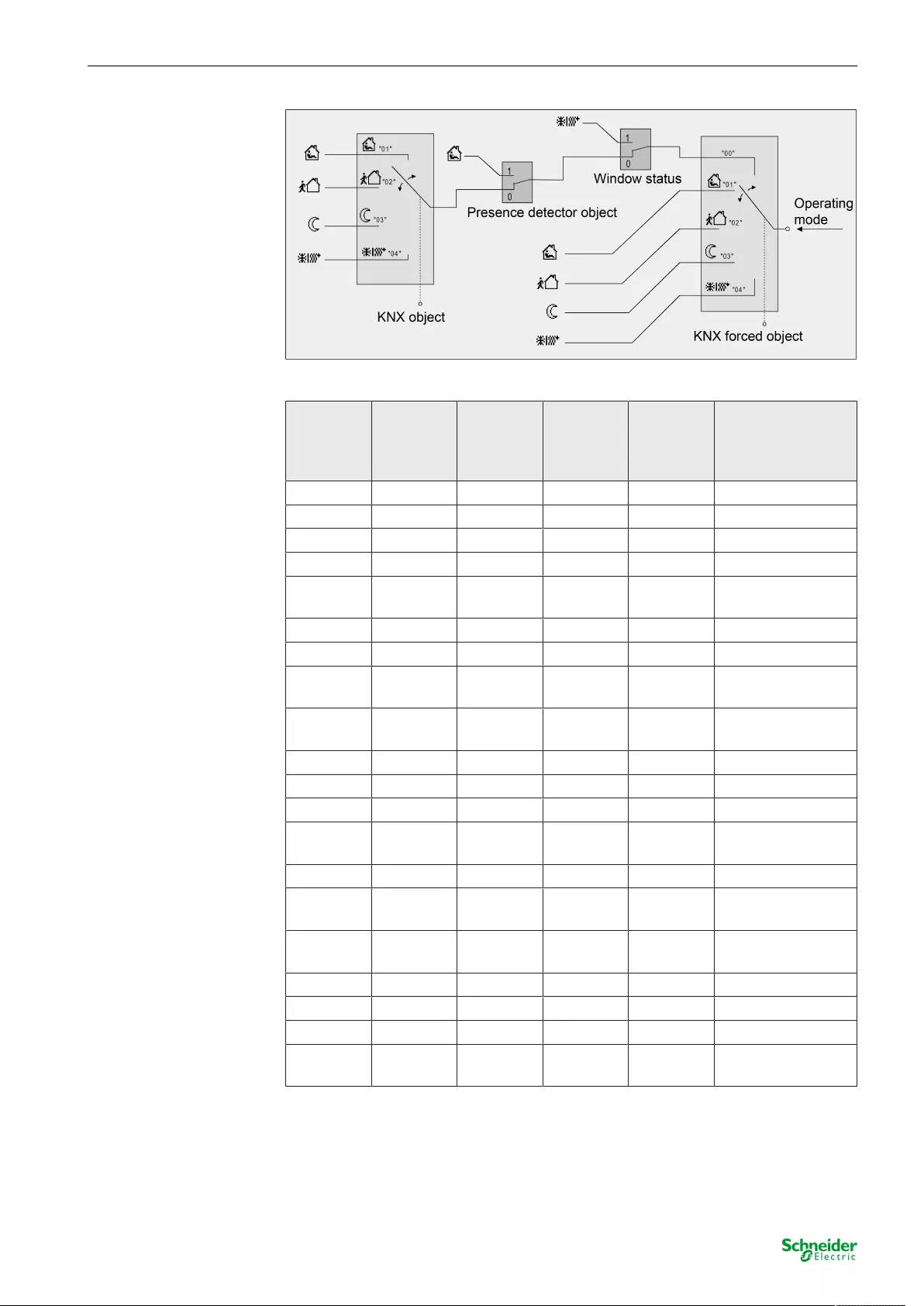
SpaceLogic KNX Valve Drive Controller Operating mode switchover
144 | MTN6730-0002 11.08.2020
Image42: Operating mode switchover through KNX object with presence detector
Object value
Operating
mode
switch-over
Object value
Forced ob-
ject
Oper.m.
object
Window
status
Pres-
ence
button
Pres-
ence
detector
Resulting operating
mode
00 00 0 X 0 No modification
01 00 0 0 - Comfort mode
02 00 0 0 - Standby mode
03 00 0 0 - Night operation
04 00 0 0 - Frost/heat protec-
tion
01 00 0 1 - Comfort mode
02 00 0 1 - Comfort mode
03 00 0 1 - Comfort ex-
tension
04 00 0 1 - Comfort ex-
tension
01 00 0 - 0 Comfort mode
02 00 0 - 0 Standby mode
03 00 0 - 0 Night operation
04 00 0 - 0 Frost/heat protec-
tion
X 00 0 - 1 Comfort mode
X 00 1 - X Frost/heat protec-
tion
X 00 1 X - Frost/heat protec-
tion
X 01 X X X Comfort mode
X 02 X X X Standby mode
X 03 X X X Night operation
X 04 X X X Frost/heat protec-
tion
Status of the communication objects and the resulting operating mode
X: Status irrelevant
-: Not possible
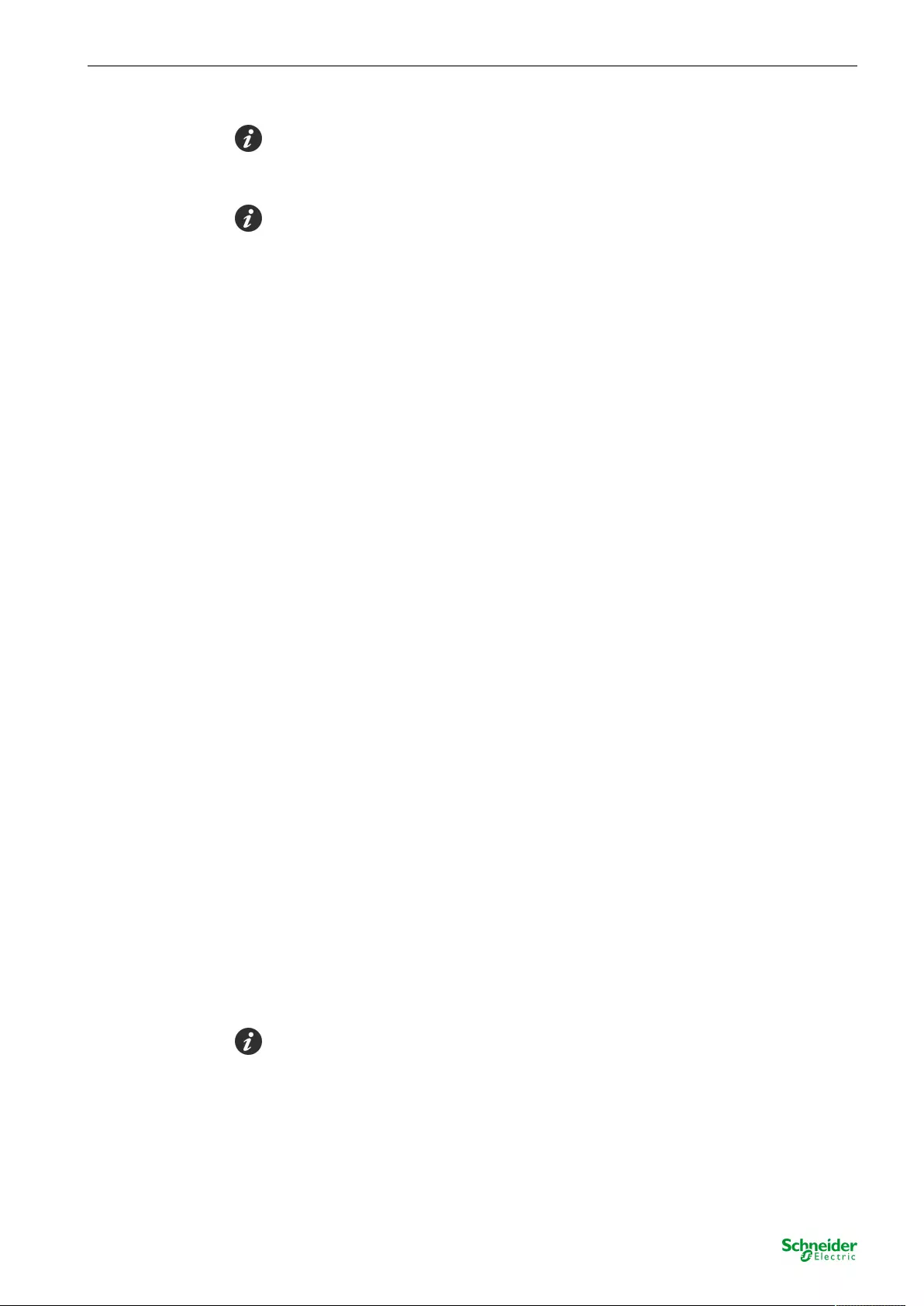
SpaceLogic KNX Valve Drive Controller Operating mode switchover
145 | MTN6730-0002 11.08.2020
After bus voltage recovery or an ETS programming operation (controller reset), the
value which corresponds to the set operating mode is actively transmitted to the
bus, if the "Transmit" flag has been set.
In parameterisation of a presence button: the presence object will be active ("1") for
the period of an active comfort extension. The presence object will be automatically
deleted ("0") if the comfort extension is stopped after the extension time has
elapsed, or if the operating mode has been changed by an operation through the
switchover objects or a forced operating mode is deactivated by the KNX forced ob-
ject (forced object -> "00"). The controller therefore automatically resets the status
of the presence button when an object value is received via the operating mode ob-
jects or the forced object is reset.
Additional information on the Presence function /
Comfort extension
With presence detection, the room temperature controller can quickly switch over
to a comfort extension upon push-button actuation using a presence button or, us-
ing a presence detector, switch to Comfort mode when movement by a person in
the room is detected. In this regard, the "Presence detection" parameter in the
"Room temperature control -> RTCx - General -> RTCx - Controller functionality"
parameter node sets whether presence detection should be movement-controlled
by a motion detector or manual through presence button actuation...
– Presence detection by the presence button
If the presence button is configured for presence detection, then the 1-bit
communication object "Presence button" is enabled. An "ON" telegram to
this object makes it possible to switch to the Comfort extension if night oper-
ation or frost/heat protection (not activated by the "Window status" object!)
is active. The extension will be automatically deactivated as soon as the
configured "Length of comfort extension" time has elapsed. A comfort exten-
sion can be deactivated in advance if an "OFF" telegram is received via the
object of the presence button. You cannot re-trigger such extension time.
If you have set the length of comfort extension to "0" in the ETS, you cannot
activate a comfort extension from the night or frost/heat protection mode. In
this case, the operating mode will not be changed, although the presence
function has been activated.
If the standby mode is active, actuation on a presence object value = "ON"
allows a switchover to the Comfort mode. This will also be the case if you
have configured the length of comfort extension to "0". Comfort mode will
remain active as long as the presence function remains active, or until an-
other operating mode is specified.
The presence function will always be deleted whenever a switchover to a
different operating mode takes place, or after a forced operating mode has
been deactivated (associated with KNX forced switchover). An active pres-
ence function is always deleted on a device reset (bus voltage failure, ETS
programming operation).
If, during an active Comfort extension and with a frost/heat protection switchover
being configured "via window status", a window is opened, then the controller will
activate frost/heat protection immediately. The Comfort extension remains active in
the background and the configured time continues to elapse. If the time elapses
and the window remains open, the presence is reset and an appropriate telegram is
sent to the bus. However, if the window is closed again before the time has
elapsed, then the Comfort extension is executed again with the remaining run time.
– Presence detection by the presence detector
If a presence detector is configured for presence detection, then the 1-bit
communication object "Presence detector" is enabled. With this object, it is

SpaceLogic KNX Valve Drive Controller Operating mode switchover
146 | MTN6730-0002 11.08.2020
possible to integrate presence detectors into room temperature control. If a
movement is detected ("ON" telegram), the controller will switch to Comfort
mode. In this connection, it is irrelevant what has been set by the switchover
objects. Only a window contact or the KNX forced object are of higher prior-
ity.
After the delay time has elapsed in the presence detector after a detected
movement ("OFF" telegram), the controller will return to the mode which
was active before presence detection, or it will compensate the telegrams of
the operating mode objects received during presence detection, respect-
ively.
E An active presence function is always deleted on a device reset (bus
voltage failure, ETS programming operation). In this case, the presence de-
tector must transmit a new "1"-telegram to the controller to activate the pres-
ence function.
Additional information on the window status and the
automatic frost protection
The room temperature controller offers various options to change over into the
Frost/heat protection mode. In addition to switching over by means of the corres-
ponding operating mode switchover object, frost/heat protection can be activated
by a window contact, or alternatively, the frost protection can be activated by an
automatic temperature function. The window contact or the automatic function has
higher priority. The "Frost/heat protection" parameter in the "Room temperature
control -> RTCx - General" parameter branch specifies the way in the switch-over
to forced frost/heat protection takes place...
– Frost/heat protection switch-over "via window status"
The 1-bit object "Window status" is enabled. A telegram having the value of
= "ON" (open window) and sent to this object will activate the frost/heat pro-
tection mode. If this is the case, the operating mode cannot be deactivated
by the switchover objects (except for the KNX forced object) or the pres-
ence function. Only a telegram with the value = "OFF" (closed window) will
reset the window status and deactivate the frost/heat protection mode. After
this, the operating mode set before the opening of the window or that mode
carried by the bus while the window was open will be activated.
You can optionally configure a delay for the evaluation of the window status.
Such delay can make sense if short ventilation of the room by opening the
window is not supposed to change the operating mode. You can use the
"window status delay" parameter to set this delay time between 1 and 255
minutes. The window status will only be changed and thus the frost/heat
protection mode activated after this parameterized time has elapsed. A set-
ting of "0" will effect the immediate activation of the frost/heat protection
mode when the window is open. The window status will be in effect in the
heating and in the cooling mode. After a bus voltage failure or ETS pro-
gramming operation, the window status is always inactive.
– Frost protection mode switch-over by "automatic frost protection"
For this setting, automatic switch-over to the frost protection mode can be
made at times, depending on the room temperature determined. If there are
no window contacts, this setting can prevent unnecessary heating up of a
room when windows or external doors are open. With this function, a quick
temperature drop can be detected by measuring the actual temperature
every minute as, for example, is the case when a window is open in the
winter months. You can use the "automatic frost protection temperature
drop" parameter to set the maximum temperature drop in K/min for switch-
ing over to the frost protection mode. If the controller detects that the room
temperature has changed by at least the configured temperature jump
within one minute, frost protection will be activated. After the time specified
by the "Frost protection period in automatic mode" parameter has elapsed,
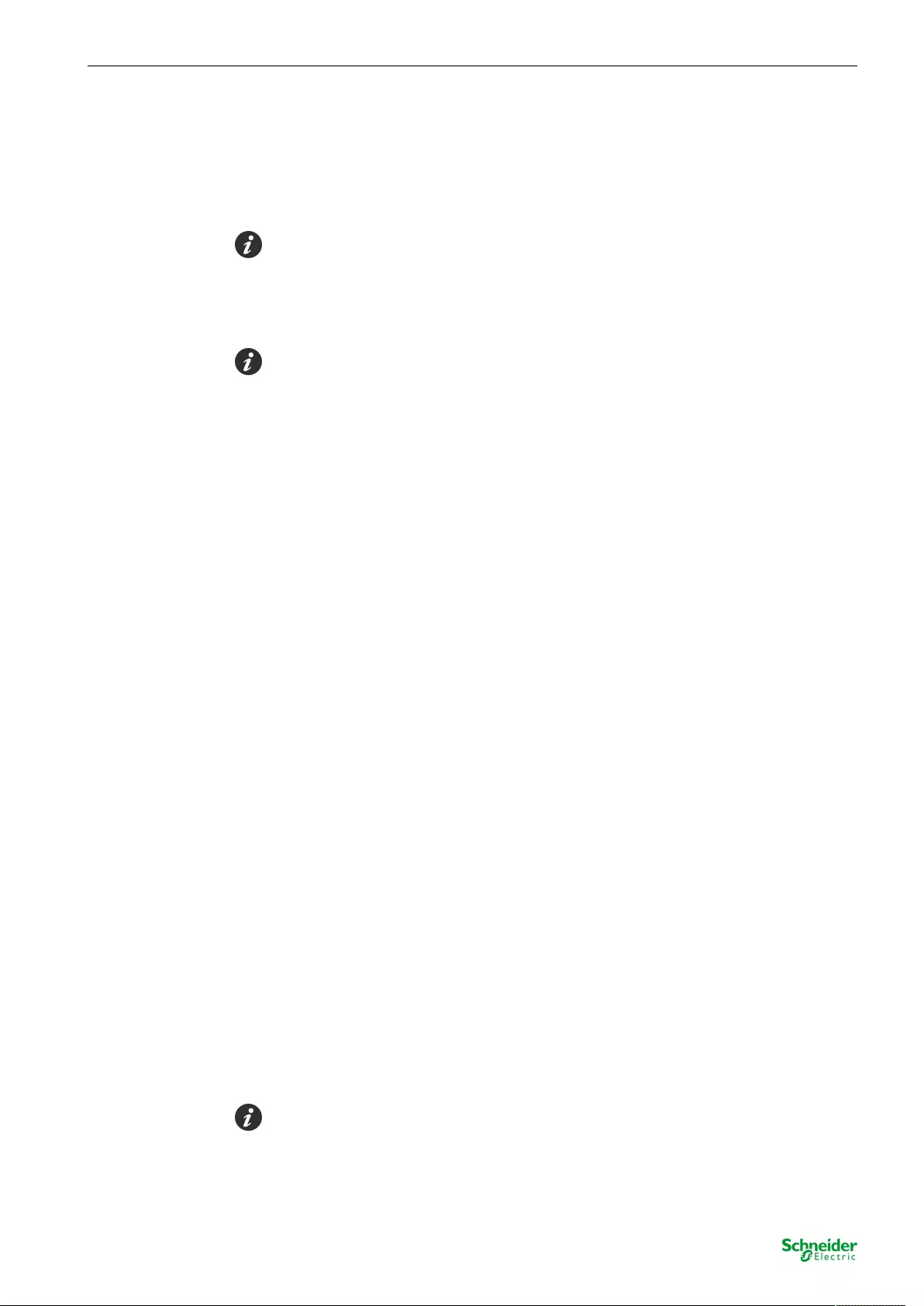
SpaceLogic KNX Valve Drive Controller Room temperature measurement
147 | MTN6730-0002 11.08.2020
the controller again automatically switches to the operating mode which was
set before frost protection or which was tracked during automatic operation.
It is not possible to retrigger an elapsing frost protection period.
The KNX forced object has a higher priority than the automatic frost protec-
tion mode and can interrupt the latter.
The automatic frost protection mode only acts on heating for temperatures below
the set value temperature of the operating mode selected. Thus, no automatic
switchover to frost protection can take place at room temperatures in the deadband
or in the active cooling mode if the "Heating and cooling" operating mode is on.
Automatic heat protection activation is not intended with this parameterization.
Frequent draughts in a room can cause unintentional activation/deactivation of frost
protection when the automatic frost protection mode is active and if the set temper-
ature decrease is too low. Therefore switching into the frost/heat protection mode
by window contacts should generally be preferred to the automatic option.
Additional information on the operating mode after a
reset
In the ETS, it is possible to use the "Operating mode after reset" parameter in the
"Room temperature control -> RTCx - General" parameter node to specify which
operating mode should be activated after bus voltage return or an ETS program-
ming operation. The following settings are possible...
– "Comfort operation" -> The comfort mode will be activated after the initial-
isation phase.
– "Standby mode" -> The standby mode will be activated after the initialisation
phase.
– "Night operation" -> The night mode will be activated after the initializing
phase.
– "Frost/heat protection operation" -> The frost/heat protection mode will be
activated after the initialisation phase.
– "Restore operating mode before reset" -> The mode set before a reset ac-
cording to the operating mode objects will be restored after the initialisation
phase of the device. Operating modes set by a function with a higher priority
before the reset (Forced, Window status, Presence status) are not effected.
11.5 Room temperature measurement
Basic principles
The controller detects the room temperatures using one or possibly two external
KNX temperature sensors (e.g. push-button sensors with temperature measure-
ment). Temperature detection is configured on the parameter page "Room temper-
ature control -> RTCx - General -> RTCx - Room temperature measurement". De-
pending on the configuration, the 2-byte objects "Received temperature 1 (temper-
ature sensor 1)" and, optionally, "Received temperature 2 (temperature sensor 2)"
are enabled.
According to KNX DPT 9.001, the temperature values must be made available to
the controller in the format "°C".
When choosing the mounting location of the external temperature sensor, the fol-
lowing points must be considered...

SpaceLogic KNX Valve Drive Controller Room temperature measurement
148 | MTN6730-0002 11.08.2020
– The temperature sensor should not be used in multiple combinations, espe-
cially together with flush-mounted dimmers.
– Do not install the temperature sensor in the area of large electrical con-
sumers (avoid heat influences).
– The push button sensor should not be installed in the vicinity of radiators or
cooling systems.
– The temperature sensor should not be exposed to direct sun.
– The installation of sensors on the inside of an outside wall might have a
negative impact on the temperature measurement.
– Temperature sensors should be installed at least 30 cm away from doors,
windows or ventilation units and at least 1.5 m above the floor.
Temperature detection and measured value formation
The "Temperature detection of the room controller by" parameter in the "Room
temperature control -> RTCx - General -> RTCx - Room temperature measure-
ment" parameter node specifies how many external KNX sensors detect the room
temperature. The following settings are possible for temperature detection
– "External temperature value 1"
The actual temperature is determined solely via an external temperature
value. In this case, the KNX temperature sensor is connected to the control-
ler via the 2-byte object "Received temperature 1 (Temperature sensor 1)".
The controller can request the current temperature value cyclically. For this
purpose, the parameter "Request time of the temperature value" must be
set to a value > "0". The request interval can be configured within the limits
of 1 minute to 255 minutes.
After a device reset, the controller will first wait for a valid temperature tele-
gram until the feedback control starts and a command value, if applicable, is
output.
– "External temperature values 1 + 2"
The actual temperature is determined using two external temperature val-
ues. The selected temperature sources are combined. In this case, the KNX
temperature sensors are connected to the controller via the two
2-byte objects "Received temperature 1 (Temperature sensor 1)" and
"Received temperature 2 (Temperature sensor 2)".
When evaluating, the real actual temperature is made up of the two temper-
ature values provided. The weighting of the temperature values is defined
by the parameter "Measured value formation, temperature value 1 to tem-
perature value 2". Depending on the different locations of the sensors or
non-uniform heat distribution inside the room, it is thus possible to adjust the
actual temperature measurement. Often, those temperature sensors that
are subject to negative external influences (for example, unfavourable loca-
tion because of exposure to sun or heater or door / window directly next to
it) are weighted less heavily.
Example: A temperature sensor has been installed next to the entrance
door. An additional temperature sensor has been mounted on an inner wall
in the middle of the room below the ceiling.
Sensor 1: 21.5 °C
Sensor 2: 22.3 °C
Determination of measured value: 30 % to 70 %
-> TResult 1 = T1 · 0,3 = 6,45 °C,
-> TResult 2 = T2 = 22,3 °C · 0,7 = 15,61 °C
-> TResult = TResult 1 + TResult 2 = 22,06 °C

SpaceLogic KNX Valve Drive Controller Room temperature measurement
149 | MTN6730-0002 11.08.2020
The controller can request both current temperature values cyclically. For
this purpose, the parameter "Polling time of the temperature values" must
be set to a value > "0". The request interval can be configured within the
limits of 1 minute to 255 minutes.
After a device reset, the controller will first wait for valid temperature tele-
grams to both objects until control starts and a command value, if applic-
able, is output.
Calibrating the measured values
In some cases during room temperature measurement, it may be necessary to ad-
just the external KNX temperature values. Adjustment becomes necessary, for ex-
ample, if the temperature measured by the sensors stays permanently below or
above the actual temperature in the vicinity of the sensor. To determine the tem-
perature deviation, the actual room temperature should be detected with a refer-
ence measurement using a calibrated temperature measuring device.
The parameters "Calibration of temperature value 1" and "Calibration of temperat-
ure value 2" can configure the positive (temperature increase, factors: 1 ... 127) or
negative (temperature decrease, factors -128... -1) temperature calibration in
levels of 0.1 K. Thus, the calibration is made only once statically and is the same
for all operating modes of the controller.
The measured value has to be increased, if the value measured by the sensor lies
below the actual room temperature. The measured value has to be decreased, if
the value measured by the sensor lies above the actual room temperature.
During room temperature control, the device always uses the adjusted temperature
value to calculate the command values. The adjusted temperature value is trans-
mitted to the bus via the "Actual temperature" object. When determining the meas-
ured value using both external sensors, the calibrated values are also used to cal-
culate the actual value.
Temperature adjustment only affects the room temperature measurement.
Transmission of the actual temperature
The determined actual temperature can be actively transmitted to the bus via the
2-byte "Actual temperature" object. The parameter "Transmission when room tem-
perature change by..." specifies the temperature value by which the actual value
has to change in order to have the actual temperature value transmitted automatic-
ally via the object. Possible temperature value changes lie within a range of
0.1 K and 25.5 K. Setting to "0" at this point will deactivate the automatic transmis-
sion of the actual temperature.
In addition, the actual value can be transmitted periodically. The "Cyclical transmis-
sion of the room temperature" parameter determines the cycle time
(1 to 255 minutes). The value "0" will deactivate the periodical transmission of the
actual temperature value. If the "Read" flag is set on the "Actual temperature" ob-
ject, this makes it possible to read out the current actual value at any time over the
bus. It has to be pointed out that with deactivated periodical transmission and de-
activated automatic transmission, no more actual-temperature telegrams will be
transmitted".
Following the return of bus voltage or after programming via the ETS, the object
value will be updated according to the current actual temperature value and trans-
mitted as soon as all the external temperature values of the KNX sensors have
been received. If no external temperature values have been received after a reset,
SpaceLogic KNX Valve Drive Controller Temperature setpoints
150 | MTN6730-0002 11.08.2020
then the value "0" will be seen in the "Actual temperature" object. For this reason,
all the external temperature sensors should always transmit their current measured
temperature value after a reset.
During room temperature control, the controller always uses the calibrated temper-
ature values to calculate the command values. The calibrated temperature values
can be actively transmitted to the bus via the "Actual temperature" object.
11.6 Temperature setpoints
Setpoint temperature presetting
Setpoint temperatures can be specified for each operating mode in the ETS as part
of configuration. It is possible to configure the setpoints for the "Comfort",
"Standby" and "Night" modes directly (absolute setpoint presetting) or relatively
(derivation from basic setpoint). The setpoint temperatures can later be adapted
during regular operation by KNX communication objects, if desired.
The "Frost/heat protection" operating mode allows the separate configuration of two
temperature setpoints for heating (frost protection) and cooling (heat protection)
solely in the ETS. These temperature values cannot be changed later during con-
troller operation.
The "Setpoint specification" parameter on the parameter page "Room temperature
control -> RTCx - General -> RTCx - Setpoints" defines the way the setpoint tem-
perature is specified...
– "Relative (setpoint temperatures from basic setpoint)" setting:
When presetting the set-temperatures for comfort, standby and night mode,
attention has to be paid to the fact that all setpoints depend on each other
as all values are derived from the basic temperature (basic setpoint). The
"Basic temperature after reset" parameter on the "Room temperature con-
trol -> RTCx - General -> RTCx - Setpoints" parameter page determines the
basic setpoint, which is loaded as the specification value when the device is
programmed via the ETS. Taking into account the "Reduce / increase the
setpoint temperature in Standby mode" or "Reduce / increase the setpoint
temperature in Night mode" parameters, the temperature setpoints for the
standby and night mode are derived from this value depending on the heat-
ing or cooling operating mode. The deadband will be additionally considered
for the "Heating and cooling" operating mode.
The 2-byte object "Basic setpoint" provides the option of changing the basic
temperature, and thus all the dependent setpoint temperatures during
device operation. A change via the object must always be enabled in the
ETS by configuring the parameter "Change the basic temperature setpoint
via bus" to "Approve". If the basic setpoint adjustment via the bus is dis-
abled, the "Basic setpoint" object will be hidden. The controller rounds the
temperature values received via the object to the specified "Step width of
the setpoint shift" (0,1 K or 0,5 K).
– "Absolute (independent setpoint temperatures)" setting
The setpoint temperatures for comfort, standby and night mode are inde-
pendent of each other. Depending on the operating mode and heating/cool-
ing mode, various temperature values can be specified in the ETS within the
range +7.0 °C to +40.0 °C. The ETS does not validate the temperature val-
ues. It is thus possible, for example, to select smaller setpoint temperatures
for cooling mode than for heating mode, or to specify lower temperatures for
comfort mode than for standby mode.
After commissioning using the ETS the setpoint temperatures can be
changed via the bus by means of temperature telegrams. This can be done
using the communication object "Setpoint active operating mode". When the

SpaceLogic KNX Valve Drive Controller Temperature setpoints
151 | MTN6730-0002 11.08.2020
controller receives a telegram via this object, it immediately sets the re-
ceived temperature as the new setpoint of the active operating mode, and
operates from then on with this setpoint. In this manner it is possible to ad-
apt the setpoint temperatures of all operating modes separately for eating
and cooling mode. The frost or heat protection temperature programmed in
using the ETS cannot be changed in this manner.
With absolute setpoint presetting there is no basic setpoint and also no deadband
in the mixed operating mode "Heating and cooling" (if necessary also with addi-
tional level). Consequently, the room temperature controller cannot control the
switchover of the operating mode automatically, which is why, in this configuration,
the setting for the parameter "Switchover between heating and cooling" is fixed in
the ETS to "Via object".
Furthermore, setpoint shifting does not exist for absolute setpoint presetting.
In two-level control mode, all set-temperatures of the additional level are derived
from the setpoint temperatures of the basic level. The setpoint temperature of the
additional level are determined by subtracting the "Difference between basic and
additional levels", which is permanently configured in the ETS, from the setpoints of
the basic level in heating mode or by adding the setpoints in cooling mode. If the
temperature setpoints of the basic level are changed, the setpoint temperatures of
the additional level will be automatically changed as well. Both levels will heat or
cool with the same command value at the same time when the level distance is "0".
The temperature setpoints programmed in the room temperature controller by the
ETS during commissioning can be changed via communication objects. In the
ETS, parameter "Overwrite setpoints in device during ETS programming opera-
tion?" on the parameter page "Room temperature control -> RTCx - General ->
RTCx - Setpoints" to define whether the setpoints present in the device, which may
have been changed subsequently, are overwritten during an ETS programming op-
eration and are thus replaced again by the values configured in the ETS. If this
parameter is "Yes", then the setpoint temperatures are deleted in the device during
a programming operation and replaced by the values of the ETS. If this parameter
is configured to "No", then setpoints present in the device remain unchanged. The
setpoint temperatures entered in the ETS then have no significance.
During initial commissioning of the device the parameter "Overwrite setpoints in
device during ETS programming operation?" must be set to "Yes" in order to per-
form valid initialisation of the memory slots in the device. The setting "Yes" is also
necessary if essential controller properties (operating mode, setpoint specification,
etc.) are changed in the ETS through new parameter configurations!
Setpoint temperatures for relative setpoint presetting
Depending on the operating mode, different cases should be distinguished when
specifying the relative setpoint temperature, which then have an impact on the tem-
perature derivation from the basic setpoint.
Setpoints for operating mode "Heating"
SpaceLogic KNX Valve Drive Controller Temperature setpoints
152 | MTN6730-0002 11.08.2020
Image43: Setpoint temperatures in the operating mode "Heating"
The setpoint temperatures for comfort, standby and night mode exist for this oper-
ating mode. The frost protection temperature can be preset (see figure 43). The fol-
lowing applies…
TStandby setpoint heating ≤ TComfort setpoint heating
or
TNight setpoint heating ≤ TComfort setpoint heating
The standby and night setpoint temperatures are derived from the reduction tem-
peratures configured in the ETS from the comfort setpoint temperature (basic set-
point). The frost protection is supposed to prevent the heating system from freez-
ing. For this reason the frost protection temperature (default: +7 °C) should be to a
set smaller value than the night temperature. In principle, however, it is possible to
select frost protection temperature values between +7.0 °C and +40.0 °C. The pos-
sible range of values for a setpoint temperature is bounded by the frost protection
temperature in the lower range.
The level offset configured in ETS will be additionally considered in a two-level
heating mode (see figure 44).
Image44: Setpoint temperatures in the operating mode "Basic and additional heat-
ing"
TComfort setpoint additional level heating ≤ TComfort setpoint basic level heating
TStandby setpoint additional level heating ≤ TStandby setpoint basic level heating
TStandby setpoint heating ≤ TComfort setpoint heating
or
TComfort setpoint additional level heating ≤ TComfort setpoint basic level heating
TNight setpoint additional level heating ≤ TNight setpoint basic level heating
TNight setpoint heating ≤ TComfort setpoint heating
Setpoints for the "cooling" operating mode
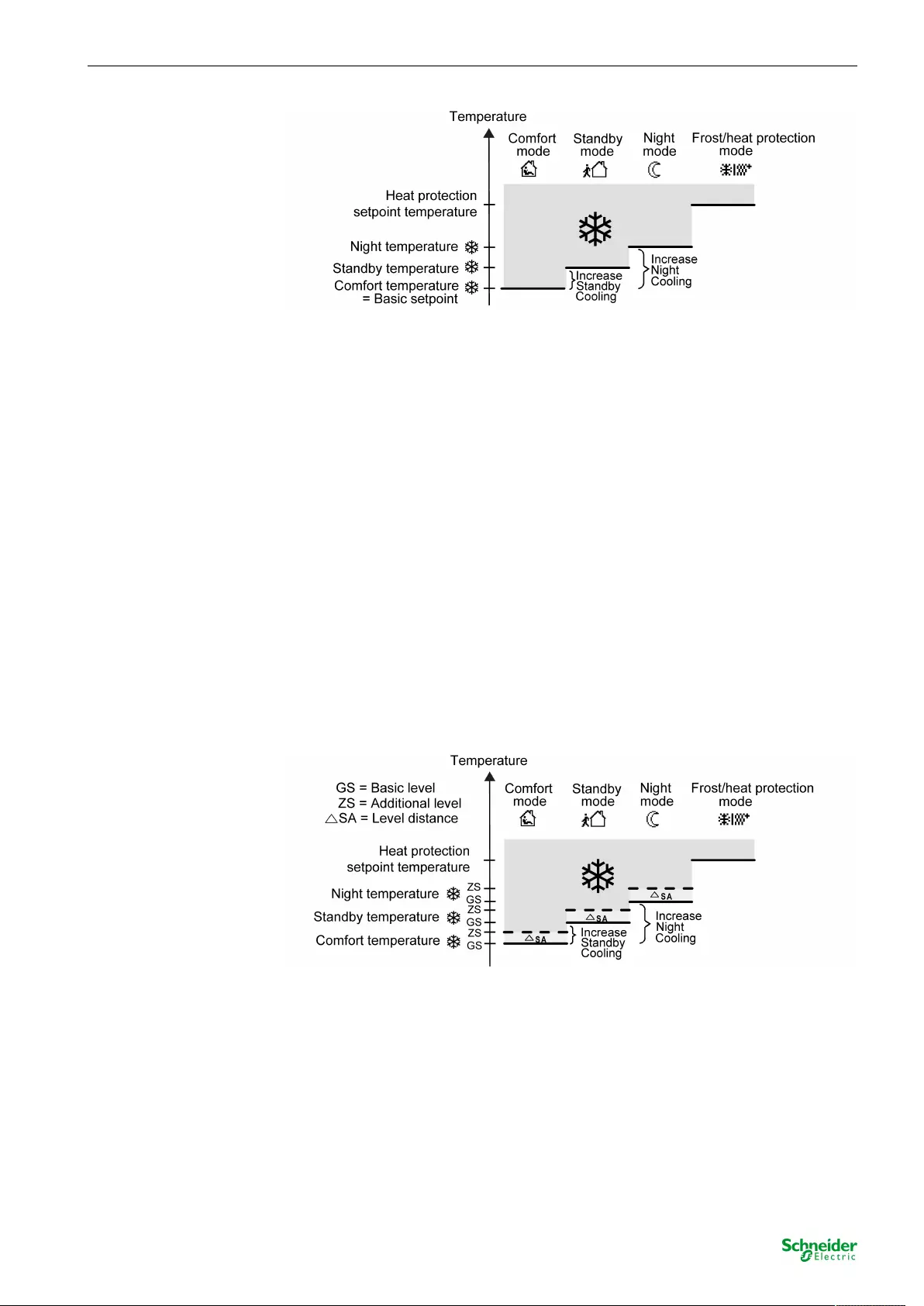
SpaceLogic KNX Valve Drive Controller Temperature setpoints
153 | MTN6730-0002 11.08.2020
Image45: Setpoint temperatures in the operating mode "Cooling"
The setpoint temperatures for Comfort, Standby and Night mode exist in this oper-
ating mode and the heat protection temperature can be preset (see figure 45).
The following applies…
TComfort setpoint cooling ≤ TStandby setpoint cooling
or
TComfort setpoint cooling ≤ TNight setpoint cooling
The standby and night set-temperatures are derived after the configured increase
temperatures from the comfort set-temperature (basic setpoint). The heat protec-
tion is supposed to ensure that the temperature does not exceed the maximum
permissible room temperature in order to protect system components. For this
reason the heat protection temperature (default: +35 °C) should be set to a larger
value than the night temperature. In principle, however, it is possible to select heat
protection temperature values between +7.0 °C and +45.0 °C. The possible range
of values for a setpoint temperature is bounded by the heat protection temperature
in the upper range.
The level offset configured in ETS will be additionally considered in a two-level
cooling mode (see figure 46).
Image46: Setpoint temperatures in the operating mode "Basic and additional cool-
ing"
TComfort setpoint basic level cooling ≤ TComfort setpoint additional level cooling
TStandby setpoint basic level cooling ≤ TStandby setpoint additional level cooling
TComfort setpoint cooling ≤ TStandby setpoint cooling
or
TComfort setpoint basic level cooling ≤ TComfort setpoint additional level cooling
TNight setpoint basic level cooling ≤ TNight setpoint additional level cooling
TComfort setpoint cooling ≤ TNight setpoint cooling
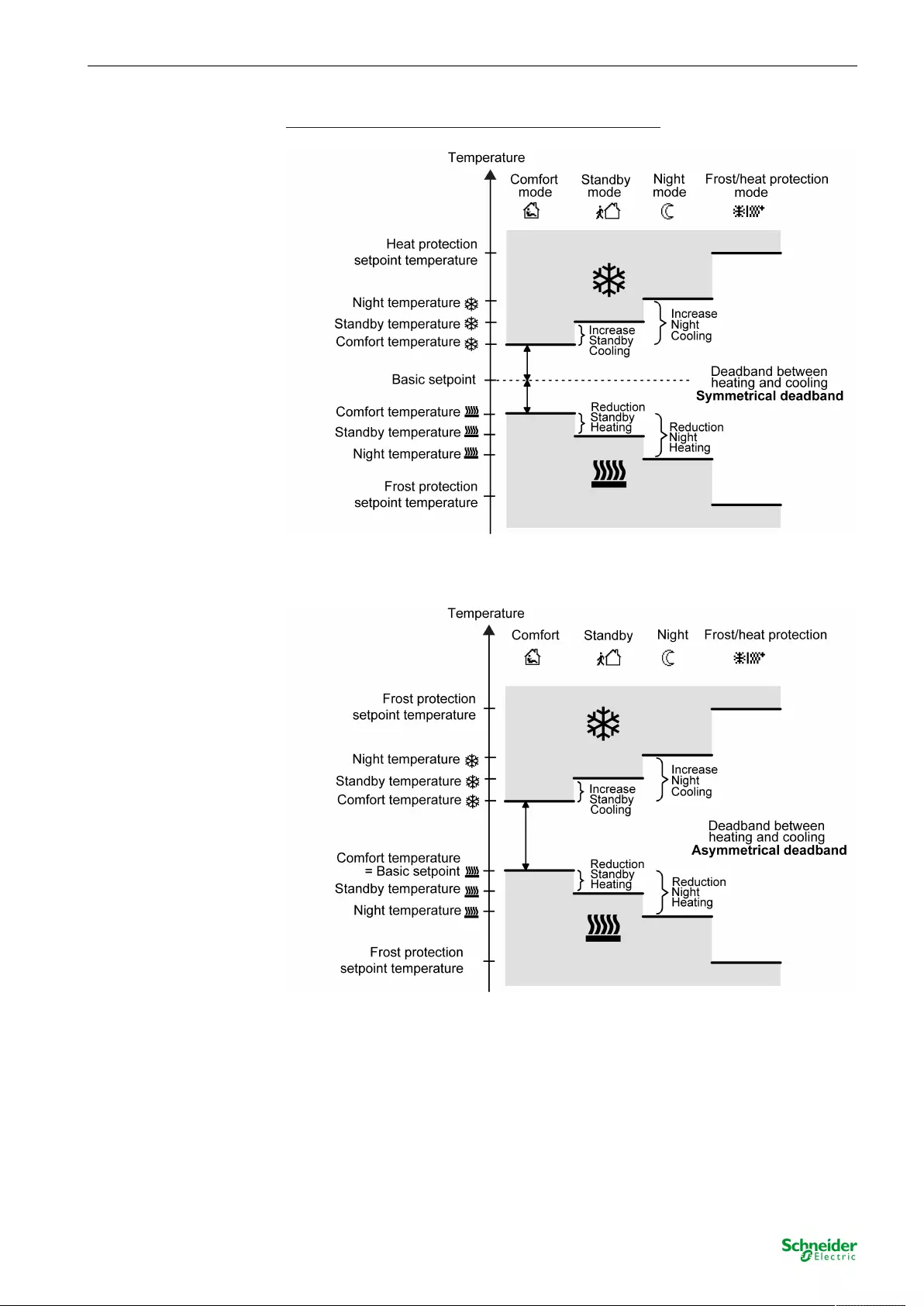
SpaceLogic KNX Valve Drive Controller Temperature setpoints
154 | MTN6730-0002 11.08.2020
Setpoints for the "heating and cooling" operating mode
Image47: Setpoint temperatures in the operating mode "Heating and cooling" with
symmetrical deadband
Image48: Setpoint temperatures in the operating mode "Heating and cooling" with
asymmetrical deadband
For this heating/cooling operating mode, the setpoint temperatures of both heating/
cooling modes exist for the Comfort, Standby and Night operating modes as well
as the deadband. A distinction is made in the deadband position with combined
heating and cooling. A symmetrical (see figure 47) or an asymmetrical
(see figure 48) deadband position can be configured. In addition, the frost protec-
tion and the heat protection temperatures can be preset.
The following applies…
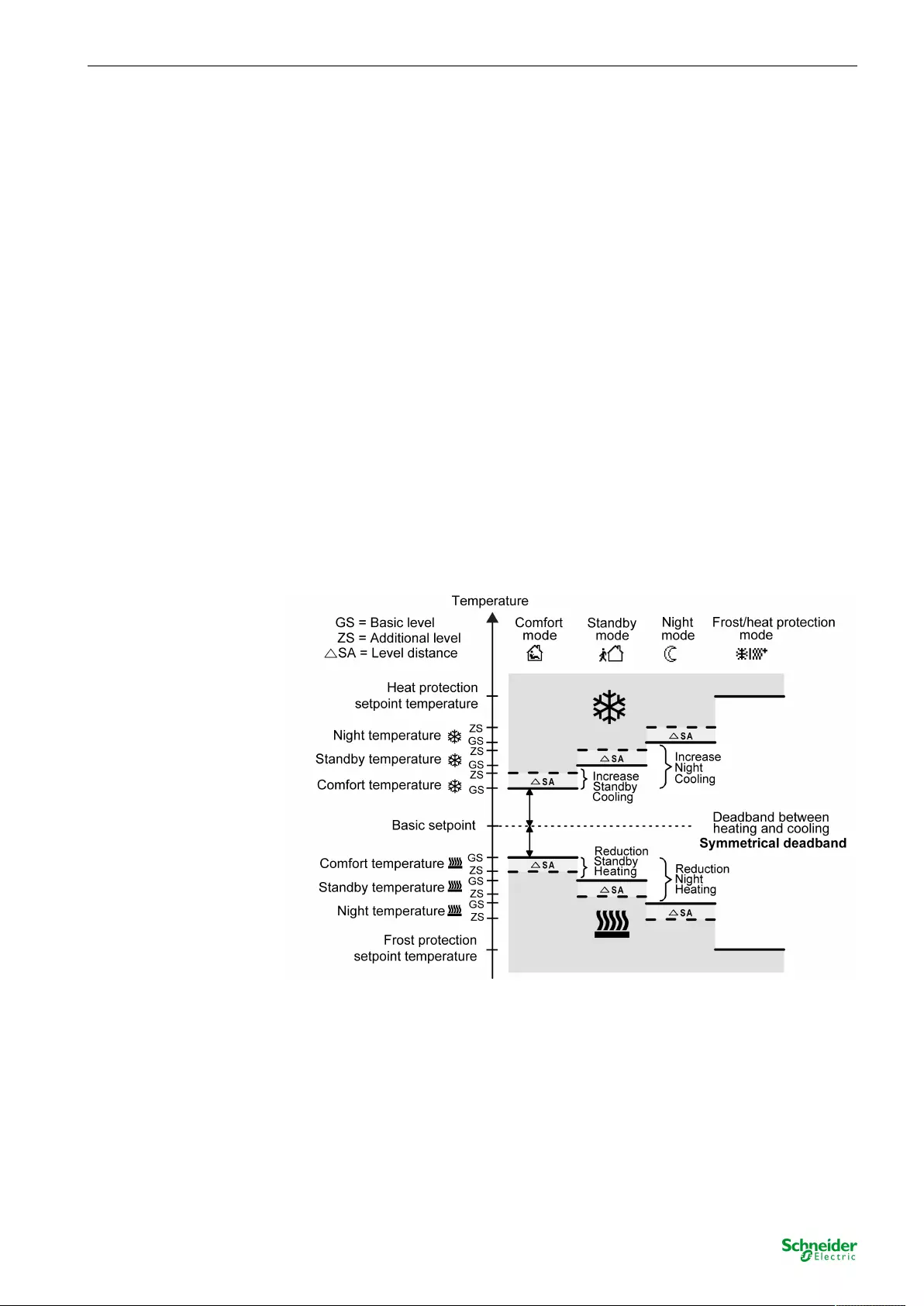
SpaceLogic KNX Valve Drive Controller Temperature setpoints
155 | MTN6730-0002 11.08.2020
TStandby setpoint heating ≤ TComfort setpoint heating ≤ TComfort setpoint cooling ≤ TStandby setpoint cooling
or
TNight setpoint heating ≤ TComfort setpoint heating ≤ TComfort setpoint cooling ≤ TNight setpoint cooling
The set-temperatures for "Standby" and "Night" are derived from the comfort set-
point temperatures for heating or cooling. The temperature increase (for cooling)
and the temperature decrease (for heating) of both operating modes can be preset
in ETS. The comfort temperatures itself are derived from the deadband and the ba-
sic setpoint. The frost protection is supposed to prevent the heating system from
freezing. For this reason the frost protection temperature (default: +7 °C) should be
set to a smaller value than the night temperature for heating. In principle, however,
it is possible to select frost protection temperature values between +7.0 °C and
+40.0 °C. The heat protection is supposed to ensure that the temperature does not
exceed the maximum permissible room temperature in order to protect system
components. For this reason the heat protection temperature (default: +35 °C)
should be set to a larger value than the night temperature for cooling. In principle,
however, it is possible to select heat protection temperature values between +7.0
°C and +45.0 °C. The possible range of values for a setpoint temperature ("heating
and cooling") lies between +7.0 °C and +45.0 °C and is bounded by the frost pro-
tection temperature in the lower range and by the heat protection temperature in
the upper range.
The level offset configured in ETS will be additionally considered in a two-level
heating or cooling mode.
Image49: Setpoint temperatures in the operating mode "Basic and additional heat-
ing and cooling" with symmetrical deadband
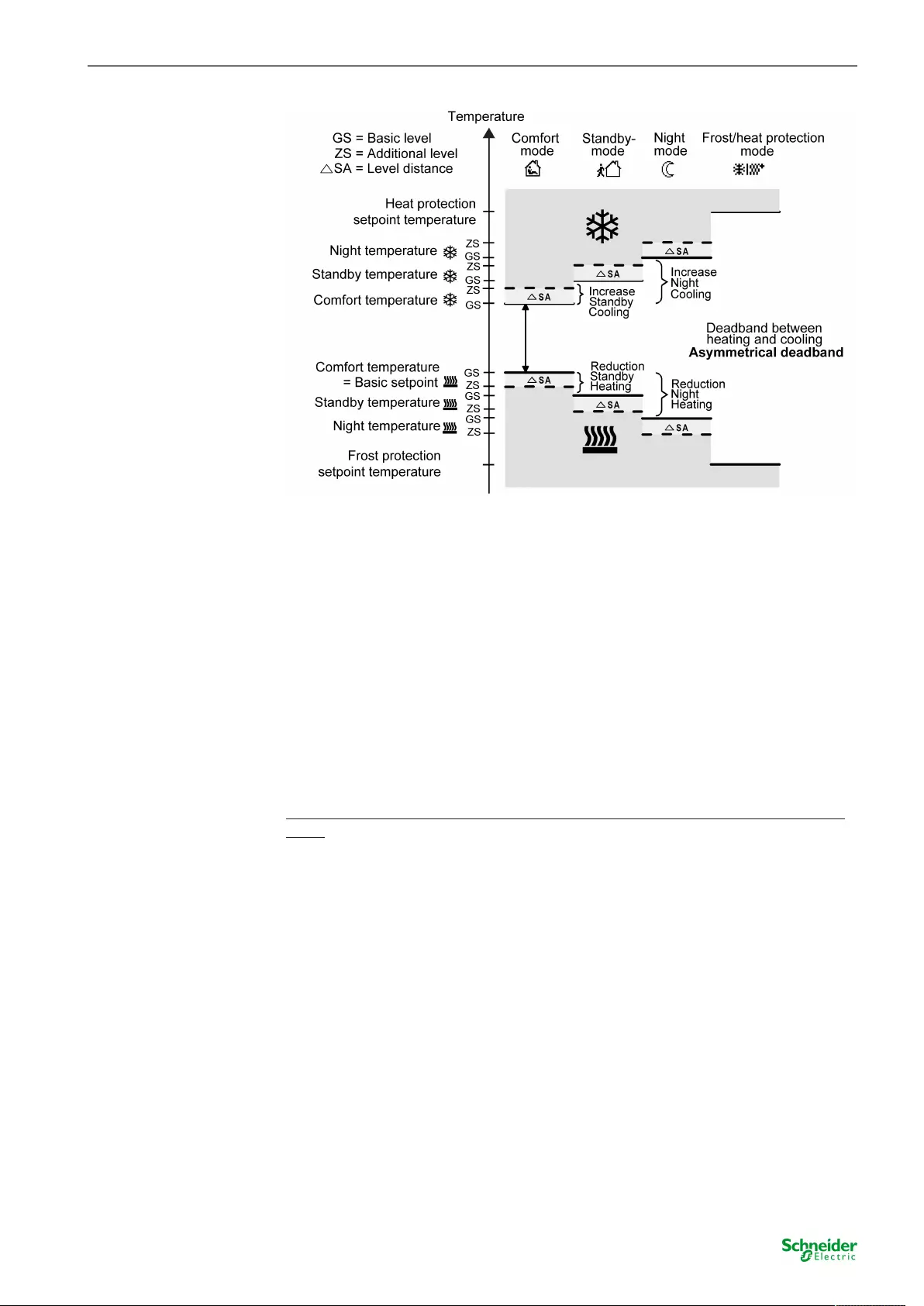
SpaceLogic KNX Valve Drive Controller Temperature setpoints
156 | MTN6730-0002 11.08.2020
Image50: Setpoint temperatures in the operating mode "Basic and additional heat-
ing and cooling" with asymmetrical deadband
TComfort setpoint add. level Heating ≤ TComfort setpoint basic level Heating ≤ TComfort setpoint basic level Cooling ≤ TComfort set-
point add. level Cooling
TStandby setpoint add. level Heating ≤ TStandby setpoint basic level Heating ≤ TStandby setpoint basic level Cooling ≤ TStandby
setpoint add. level Cooling
TStandby setpoint heating ≤ TComfort setpoint heating ≤ TComfort setpoint cooling ≤ TStandby setpoint cooling
or
TComfort setpoint add. level Heating ≤ TComfort setpoint basic level Heating ≤ TComfort setpoint basic level Cooling ≤ TComfort set-
point add. level Cooling
TNight setpoint add. level Heating ≤ TNight setpoint basic level Heating ≤ TNight setpoint basic level Cooling ≤ TNight setpoint add.
level Cooling
TNight setpoint heating ≤ TComfort setpoint heating ≤ TComfort setpoint cooling ≤ TNight setpoint cooling
deadband and deadband positions in the combined heating and cooling operating
mode
With relative setpoint presetting, the comfort setpoint temperatures for heating and
cooling are derived from the basic setpoint in consideration of the adjusted Dead
band. The deadband (temperature zone for which there is neither heating nor cool-
ing) is the difference between the comfort setpoint temperatures. This deadband
does not exist for absolute setpoint presetting.
The "deadband between heating and cooling", "deadband position" parameters as
well as the "Basic temperature after reset" parameter are preset in the ETS config-
uration. One distinguishes between the following settings...
– deadband = "symmetrical"
The deadband preset in the ETS is divided into two parts at the basic set-
point. The comfort setpoint temperatures are derived directly from the basic
setpoint resulting from the half deadband.
The following applies...
TBasic setpoint – ½TDeadband = TComfort setpoint heating
and

SpaceLogic KNX Valve Drive Controller Command value and status output
157 | MTN6730-0002 11.08.2020
TBasic setpoint + ½TDeadband = TComfort setpoint cooling
-> TComfort setpoint cooling – TComfort setpoint heating = TDeadband
-> TComfort setpoint cooling ≥ TComfort setpoint heating
– deadband position = "Asymmetrical"
With this setting the comfort setpoint temperature for heating equals the ba-
sic setpoint. The deadband preset in the ETS is effective only from the basic
setpoint in the direction of comfort temperature for cooling. Thus the comfort
set-temperature for cooling is derived directly from the comfort setpoint for
heating.
The following applies...
TBasic setpoint = TComfort setpoint heating
-> TBasic setpoint + TDeadband = TComfort setpoint cooling
-> TComfort setpoint cooling – TComfort setpoint heating = TDeadband
-> TComfort setpoint cooling ≥ TComfort setpoint heating
11.7 Command value and status output
Command value objects
The format of the command value objects are determined depending on the control
algorithm selected for heating and / or cooling and, if applicable, also for the addi-
tional levels. 1 bit or 1 byte command value objects can be created in the ETS. The
control algorithm calculates the command values in intervals of 30 seconds and
outputs them via the objects. With the pulse width-modulated PI control (PWM) the
command value is updated, if required, solely at the end of a PWM cycle.
Possible object data formats for the command values separately for both heating/
cooling operating modes, for the basic and the additional level or for both control
circuits are…
– continuous PI control: 1 byte
– Switching PI control: 1 bit + additionally 1 byte (for example for the status in-
dication with visualisations),
– switching 2-point feedback control: 1 bit.
Depending on the set heating/cooling operating mode, the controller is able to ad-
dress heating and / or cooling systems, to determine command values and to out-
put them via separate objects. One distinguishes between two cases for the "Heat-
ing and cooling" mixed operating mode...
– Case 1: Heating and cooling system are two separate systems
In this case, the "Transmit heating and cooling command value to one com-
mon object" parameter should be set to "no" in the "Room temperature con-
trol -> RTCx - General" parameter node. Thus, there are separate objects
available for each command value, which can be separately addressed via
the individual systems.
This setting allows to define separate types of control for heating and cool-
ing.
– Case 2: Heating and cooling system are a combined system
In this case, the "Transmit heating and cooling command value to one com-
mon object" parameter may be set, if required, to "yes". This will transmit
the command values for heating and cooling to the same object. In case of
a two-level feedback control, another shared object will be enabled for the
additional levels for heating and cooling.
With this setting it is only possible to define the same type of feedback con-
trol for heating and for cooling as the feedback control and the data format
must be identical. The ("Type of heating / cooling") control parameter for
cooling and heating still has to be defined separately.
A combined command value object may be required, for example, if heating

SpaceLogic KNX Valve Drive Controller Command value and status output
158 | MTN6730-0002 11.08.2020
as well as cooling shall take place via a single-pipe system (combined heat-
ing and cooling system). For this, the temperature of the medium in the
single-pipe system must be changed via the system control. Afterwards the
heating/cooling operating mode is set via the object (often the single-pipe
system uses cold water for cooling during the summer, hot water for heating
during the winter).
If required, the actuating variable can be inverted before output. With output via a
combined object, the parameters "Output of heating command value", "Output of
cooling command value" or "Output of command values..." output the command
value in inverted fashion according to the object data format. The parameters for
inverting the additional level(s) are additionally available in the two-level control.
The following applies…
For continuous command values:
-> not inverted: Command value 0 % ... 100 %, value 0 ... 255
-> inverted: Command value 0 % ... 100 %, value 255 ... 0
For switching command values:
-> not inverted: Command value off / on, value 0 / 1
-> inverted: Command value off / on, value 1 / 0
Automatic transmission
On automatic transmission of the command value telegrams, a distinction is made
with regard to the type of control...
– Continuous PI control:
In case of a continuous PI control, the room temperature controller calcu-
lates a new command value periodically every 30 seconds and outputs it to
the bus via a 1-byte value object. The change interval of the command
value can be determined in percent according to which a new command
value is to be output on the bus via the "Automatic transmission on change
by..." parameter in the "Room temperature control -> RTCx - General ->
RTCx - Command values and status output" parameter node. The change
interval can be configured to "0" so that a change in the command value will
not result in an automatic transmission.
In addition to the command value output following a change, the current
command value value may be periodically transmitted. In addition to the
times when changes are to be expected, other command value telegrams
will be output according to the active value after a configurable cycle time.
This ensures that, during cyclical security monitoring of the command value
in valve drive or in the addressed switch actuator, telegrams are received
within the monitoring time. The time interval predetermined by the "Cycle
time for automatic transmission..." parameter should correspond to the con-
trol interval in the actuator (cycle time in the controller is preferably to be
configured smaller). The "0" setting will deactivate the periodic transmission
of the command value.
With continuous PI control it must be noted that if the cyclical and the auto-
matic transmission are both deactivated, no command value telegrams will
be transmitted in case of a change!
– Switching PI control (PWM):
In case of a switching PI control (PWM), the room temperature controller
calculates a new command value internally every 30 seconds. With this
control, however, the update of the command value takes place, if required,
solely at the end of a PWM cycle. The parameters "automatic transmission
on change by..." and "Cycle time for automatic transmission..." are not en-
abled with this control algorithm. The parameter "Cycle time of the switching
command value..." defines the cycle time of the PWM command value sig-
nal.

SpaceLogic KNX Valve Drive Controller Command value and status output
159 | MTN6730-0002 11.08.2020
– 2-point feedback control:
In case of a 2-point feedback control, the room temperature and thus the
hysteresis values are evaluated periodically every 30 seconds, so that the
command values, if required, will change solely during these times. The
"Automatic transmission on change by..." parameter is not enabled as this
control algorithm does not calculate continuous command values.
In addition to the command value output following a change, the current
command value value may be periodically transmitted on the bus. In addi-
tion to the times when changes are to be expected, other command value
telegrams will be output according to the active value after a configurable
cycle time. This ensures that, during cyclical security monitoring of the com-
mand value in valve drive or in the addressed switch actuator, telegrams
are received within the monitoring time. The time interval predetermined by
the "Cycle time for automatic transmission..." parameter should correspond
to the control interval in the actuator (cycle time in the controller is prefer-
ably to be configured smaller). The "0" setting will deactivate the periodic
transmission of the command value.
Command value limit
Optionally a command value limit can configured in the ETS. The command value
limit allows the restriction of calculated command values to the range limits "min-
imum" and "maximum". The limits are permanently set in the ETS and, if command
value limitation is active, can be neither undershot or exceeded during device oper-
ation. It is possible, if available, to specify various limiting values for the basic and
additional stages and for heating and cooling.
It should be noted that the command value limit has no effect with "2-point feed-
back control" and with "Transmitting of command values for heating and cooling via
a common object"! In that case it is still possible to configure the command value
limit in the ETS, but it will have no function.
The "Command value limit" parameter on the parameter page "Room temperature
control -> RTCx - General -> RTCx command values and status output" defines the
mode of action of the limiting function. The command value limit can either be ac-
tivated or deactivated using the 1-bit communication object "Command value limit",
or be permanently active. When controlling via the object, it is possible to have the
controller activate the command value limit automatically after bus voltage return or
an ETS programming operation. Here the "Command value limit after reset" para-
meter defines the initialisation behaviour. In the "Deactivated" setting, the com-
mand value limit is not automatically activated after a device reset. A "1" telegram
must first be received via the "Command value limit" object for the limit to be activ-
ated. In the "Activated" setting, the controller activates the command value limit
automatically after a device reset. To deactivate the limit a "0" telegram must be re-
ceived via the "Command value limit" object. The limit can be switched on or off at
any time using the object.
With a permanently active command value limit, the initialisation behaviour cannot
be configured separately after a device reset, as the limit is always active. In this
case it is also not possible to configure any object.
As soon as the command value limit is active, calculated command values are lim-
ited according to the limiting values from the ETS. The behaviour with regard to the
minimum or maximum command value is then as follows...
– Minimum command value:
The "Minimum command value" parameter specifies the lower command
value limiting value. The setting can be made in 5 % increments in the
range 5 % ... 50 %. With an active command value limit, the set minimum
command value is not undershot by command values. If the controller cal-

SpaceLogic KNX Valve Drive Controller Command value and status output
160 | MTN6730-0002 11.08.2020
culates smaller command values, it sets the configured minimum command
value. The controller transmits a 0% command value if no more heating or
cooling energy has to be demanded.
– Maximum command value:
The "Maximum command value" parameter specifies the upper command
value limiting value. The setting can be made in 5 % increments in the
range 55 % ... 100 %. With an active command value limit, the set max-
imum command value is not exceeded. If the controller calculates larger
command values, it sets the configured maximum command value.
If the limit is removed, the device automatically repositions the most recently calcu-
lated command value to the unlimited values when the next calculation interval for
the command values (30 seconds) has elapsed.
An active command value limit has a negative effect on the control result when the
command value range is very restricted. A control deviation must be expected.
Controller status
The room temperature controller can transmit its current status to the KNX. A
choice of data formats is available for this. The "Controller status" parameter in the
"Room temperature control -> RTCx - General -> RTCx - Command value and
status output" parameter branch will enable the status signal and set the status
format...
– "KNX compliant"
The KNX compliant controller status feedback is harmonised on a manufac-
turer-specific basis, and consists of 3 communication objects. The 2-byte
object "KNX status" (DPT 22.101) indicates elementary functions of the con-
troller. This object is supplemented by the two 1-byte objects "KNX status
operating mode" and "KNX status forced operating mode" (DPT 20.102),
which report back the operating mode actually set on the controller . The
last two objects mentioned above are generally used to enable controller
extensions to display the controller operating mode correctly in the KNX
compliant status display. Therefore, these objects should be connected with
controller extensions if the KNX-compliant status feedback is not con-
figured.
Bit of
the
status
tele-
gram
Meaning
0 Controller error status ("0" = no error / "1" = error)
1 not used (permanent "0")
2 not used (permanent "0")
3 not used (permanent "0")
4 not used (permanent "0")
5 not used (permanent "0")
6 not used (permanent "0")
7 not used (permanent "0")
8 Operating mode ("0" = Cooling / "1" = Heating)
9 not used (permanent "0")
10 not used (permanent "0")
11 not used (permanent "0")
SpaceLogic KNX Valve Drive Controller Command value and status output
161 | MTN6730-0002 11.08.2020
Bit of
the
status
tele-
gram
Meaning
12 Controller disabled (dew point operation) ("0" = Controller enabled /
"1" = Controller disabled)
13 Frost alarm ("0" = Frost protection temperature exceeded /
"1" = frost protection temperature undershot)
14 Heat alarm ("0" = heat protection temperature exceeded /
"1" = Heat protection temperature exceeded)
15 not used (permanent "0")
Bit encoding of the 2-byte KNX-compliant status telegram
– "Controller general":
The general controller status collects essential status information of the con-
troller in two 1-byte communication objects. The "Controller status" object
contains fundamental status information. The "Status signal addition" object
collects in a bit-orientated manner further information that is not available
via the "Controller status" object. For example, controller extensions can
evaluate the additional status information, in order to be able to display all
the necessary controller status information on the extension display.
Bit of the status
telegram
Meaning
0 On "1": Comfort operation activated
1 On "1": Standby mode active
2 On "1": Night mode active
3 On "1": Frost/heat protection mode active
4 On "1": Controller disabled
5 On "1": Heating, on "0": Cooling
6 On "1": Controller inactive (deadband)
7 On "1": Frost alarm (TRoom ≤ +5 °C)
Bit encoding of the 1 byte status telegram
Bit of the
status telegram
Meaning on "1" Meaning on "0"
0 Normal operating mode Forced operating mode
1 Comfort extension active No comfort extension
2 Presence (Presence detector) No presence
(Presence detector)
3 Presence (Presence button) No presence (Presence button)
4 Window opened No window opened
5 Additional level active Additional level inactive
6 Heat protection active Heat protection inactive
7 Controller disabled
(dew point operation)
Controller not disabled
Bit encoding of the 1 byte additional status telegram
– "Transmit individual state"
The 1 bit status object "Controller status, ..." contains the status information
selected by the "Single status" parameter. Meaning of the status signals:
SpaceLogic KNX Valve Drive Controller Command value and status output
162 | MTN6730-0002 11.08.2020
"Comfort mode active": Is "ON" if the "Comfort" operating mode or a Com-
fort extension is activated.
"Standby mode active": Is "ON" if the "Standby" operating mode is activ-
ated.
"Night mode active": Is "ON" if the "Night" operating mode is activated.
"Frost/heat protection active": Is "ON" if the "Frost/heat protection" operating
mode is activated.
"Controller disabled": In "ON" if controller disable is activated (dew point
mode).
"Heating/cooling": Is "ON" if heating is activated and "OFF" if cooling is ac-
tivated. Is "OFF" if controller is disabled.
"Controller inactive" -> Is "ON" in the "Heating and cooling" operating mode
when the detected room temperature lies within the deadband. This status
information is always "OFF" for the individual "Heating" or "Cooling" operat-
ing modes. Is "OFF" if controller is disabled.
"Frost alarm" -> Is "ON" if the detected room temperature reaches or falls
below +5 °C. This status signal will have no special influence on the control
behaviour.
Upon a reset, the status objects will be updated after the initialisation phase. After
this, updating is performed cyclically every 30 seconds in parallel with the com-
mand value calculation of the controller command values. Telegrams are only
transmitted to the bus when the status changes.
Special case for command value 100% (Clipping
mode)
If with a PI control the calculated command value of the controller exceeds the
physical limits of the actuator, in other words if the calculated command value is
greater than 100%, then the command value is set to the maximum value (100%)
and thus limited. This special, necessary control behaviour is also called "clipping".
With PI control the command value can reach the value "100%" if there is a large
deviation of the room temperature from the setpoint temperature or the controller
requires a long time to adjust to the setpoint with the heating or cooling energy that
is being applied. The controller evaluates this state in a particular manner.
The controller maintains the maximum command value only as long as it is neces-
sary. After that it adjusts the command value downwards according to the PI al-
gorithm. The advantage of this control characteristic is the fact that the room tem-
perature does not exceed the setpoint temperature at all, or only slightly. It should
be mentioned that this necessary control principle increases the tendency to oscil-
late about the setpoint.
Clipping may also occur when a command value limit is active (maximum com-
mand value). In this case, if the internally calculated command value reaches
100%, then the controller only transmits to the bus the maximum command value
according to the ETS configuration.
SpaceLogic KNX Valve Drive Controller Disabling functions
163 | MTN6730-0002 11.08.2020
11.8 Disabling functions
Disable controller
Certain operation conditions may require the deactivation of the room temperature
control. For example, the controller can be switched-off during the dew point mode
of a cooling system or during maintenance work on the heating or cooling system.
The parameter "Switch off controller (dew point operation)" in the parameter node
"Room temperature control -> RTCx - General -> RTCx - Controller functionality"
enables the 1-bit object "Disable controller" when set to "Via bus". In addition, the
controller disable function can be switched off when set to "No".
In case a "1" telegram is received via the enabled disable object, the room temper-
ature control will be completely deactivated. In this case, all the command values
are equal to "0"/"OFF" (wait 30 s for update interval of the command values). The
controller, however, can be operated in this case via the communication objects.
Disable additional level
The additional stage can be separately disabled when in two-stage heating or cool-
ing mode. When set to "Yes", the "Additional level disabling object" parameter in
the "Room temperature control -> RTCx - General" parameter node will enable the
1-bit "Disable additional level" object. In addition, the disable function of the addi-
tional level can be switched off when set to "No". In case a "1" telegram is received
via the enabled disable object, the room temperature control is completely deactiv-
ated by the additional level. The command value of the additional level is "0" while
the basic level continues to operate.
Disabling operation is always inactive after a device reset (bus voltage return, ETS
programming operation).
11.9 Underfloor heating temperature limit
The temperature limit can be activated in the controller in order to influence the
maximum temperature of an underfloor heating system. If the temperature limit is
enabled in the ETS, the controller continuously monitors the floor temperature.
Should the floor temperature exceed a specific limiting value on heating, the con-
troller switches the command value off, thus switching the heating off and cooling
the system. Only when the temperature falls below the limiting value, minus a hys-
teresis of 1 K, will the controller add the most recently calculated command value.
In the ETS, the temperature limit can be activated by setting the "Underfloor heat-
ing temperature limit available" parameter in the "Room temperature control ->
RTCx - General -> RTCx - Controller functionality" parameter node to "Present".
The temperature limit is used to increase the comfort behaviour of the heating sys-
tem and may not be used as a safety-relevant protection function (immediate
forced switch-off of the heating power).
It should be noted that the temperature limit only affects command values for heat-
ing. Thus, the temperature limit requires the controller operating modes "Heating"
or "Heating and cooling". The temperature limit cannot be configured in the operat-
ing mode "Cooling".
SpaceLogic KNX Valve Drive Controller Response after a device reset
164 | MTN6730-0002 11.08.2020
The temperature limit can also be used in a two-level feedback control with basic
and additional levels. However, it must then be specified in the ETS to which level
the limit shall apply. The limit can then either apply to the basic level or to the addi-
tional level for heating using the "Affects" parameter.
The underfloor heating temperature to be monitored is fed into the controller via the
KNX communication object "Floor temperature". This object can be used to inform
the controller of the current floor temperature using suitable temperature value tele-
grams from other bus devices (e.g. analogue input with temperature sensor, etc.).
The maximum limit temperature, which the underfloor heating system may reach, is
specified in the ETS using the "Maximum underfloor heating system temperature"
parameter. The temperature can be set to a value between 20 70 °C. If this tem-
perature is exceeded, the controller switches the underfloor heating system off us-
ing the command value. As soon as the floor temperature has fallen 1 K under the
limit temperature, the controller switches the command value on again, assuming
that this is intended in the control algorithm. The 1 K hysteresis is fixed and cannot
be changed.
The floor temperature limit does not influence the "Heating" message telegram. If
the floor temperature exceeds the limiting value, only the command value is
switched off. In this case, the "Heating" message remains active.
With a pulse width-modulated command value, the temperature limit only switches
off the command value when the current PWM time cycle has elapsed.
Depending on the configuration, the temperature may have a strong impact on the
controller behaviour. Poor parameterisation of the limit temperature (limit temperat-
ure near to the room/setpoint temperature) means that it is possible that the spe-
cified setpoint temperature for the room can never be reached!
11.10 Response after a device reset
Behaviour after bus voltage return and ETS
programming operation
After the bus voltage supply is switched on or after an ETS programming opera-
tion, all the controllers of the device restart and perform an initialisation (controller
reset). In this context, various communication objects are updated (e.g. controller
status, operating mode). Refer to the appropriate chapters of the function descrip-
tion and the description of the object tables for details on the reset behaviour of in-
dividual functions and communication objects.
After a device reset, the controller will first wait for valid temperature telegrams to
the input objects of the external KNX temperature sensor until control starts and a
command value, if applicable, is output.
11.11 Parameters for room temperature
controllers
Name of the controller 20-character free text
The text entered in this parameter is used to label the controller in the ETS para-
meter window (e.g. "Kitchen control", "Bathroom temperature"). The text is not
programmed in the device.
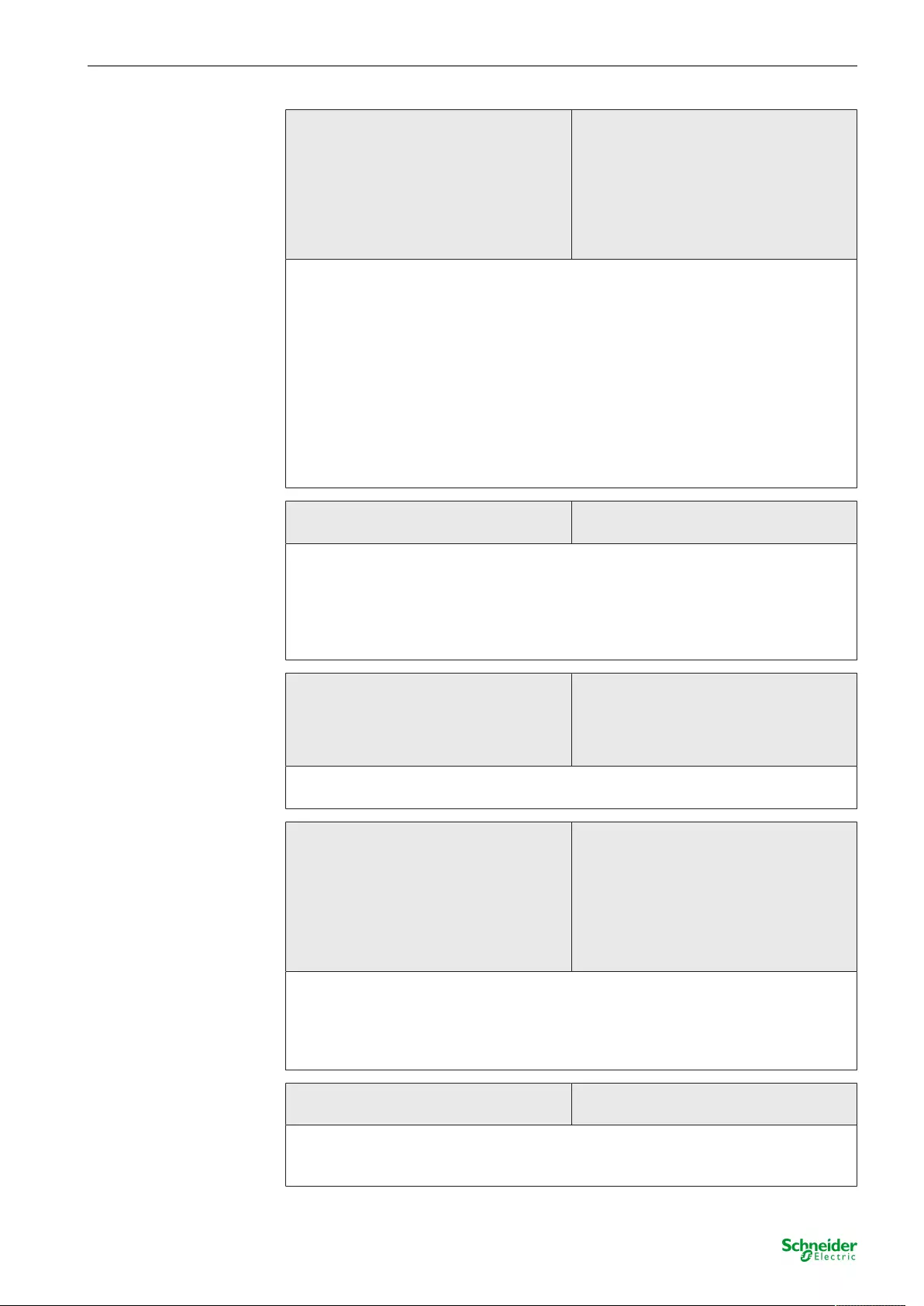
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
165 | MTN6730-0002 11.08.2020
Operating mode Heating
Cooling
Heating and cooling
Basic and additional heating
Basic and additional cooling
Basic and additional heating and cooling
The room temperature controller distinguishes between two different operating
modes. The operating modes specify whether you want the controller to use its
variable to trigger heating systems ("heating" single operating mode) or cooling
systems ("cooling" single operating mode). You can also activate mixed operation,
with the controller being capable of changing over between "Heating" and "Cool-
ing" either automatically or, alternatively, controlled by a communication object.
In addition, you can establish two-level control operation to control an additional
heating or cooling unit. For two-level feedback control, separate command values
will be calculated as a function of the temperature deviation between the setpoint
and the actual value and transmitted to the bus for the basic and additional levels.
This parameter specifies the operating mode and, if necessary, enables the addi-
tional level(s).
Transmit heating and cooling command
values to one common object
yes
no
If the parameter is set to "Yes", the command value will be transmitted on a
shared object during heating or cooling. This function is used, if the same heating
system is used to cool the room in the summer and used to heat the room in the
winter.
This parameter is only visible with "heating and cooling" mixed operating mode, if
applicable, with additional levels.
Type of heating control (if applicable, for
basic and additional level)
continuous PI control
switching PI control (PWM)
Switching 2-point feedback control (ON/
OFF)
Selecting a feedback control algorithm (PI or 2-point) with data format (1-byte or 1-
bit) for the heating system.
Type of heating (if applicable, for basic
and additional level)
Hot water heater (5 K / 150 min)
Underfloor heating (5 K / 240 min)
Electric heating (4 K / 100 min)
Fan coil unit (4 K / 90 min)
Split unit (4 K / 90 min)
via control parameter
Adapting the PI algorithm to different heating systems using predefined values for
the proportional range and reset time control parameters.
With the "Using control parameters" setting, it is possible to set the control para-
meters in a manner deviating from the predefined values within specific limits.
This parameter is only visible if "Type of heating control = Continuous PI control".
Proportional range heating (10 ... 127 x
0.1 K)
10...50...127
Separate setting of the "Proportional range" control parameter.
This parameter is only visible if "Type of heating = via control parameter" and the
heating control type "PI control".
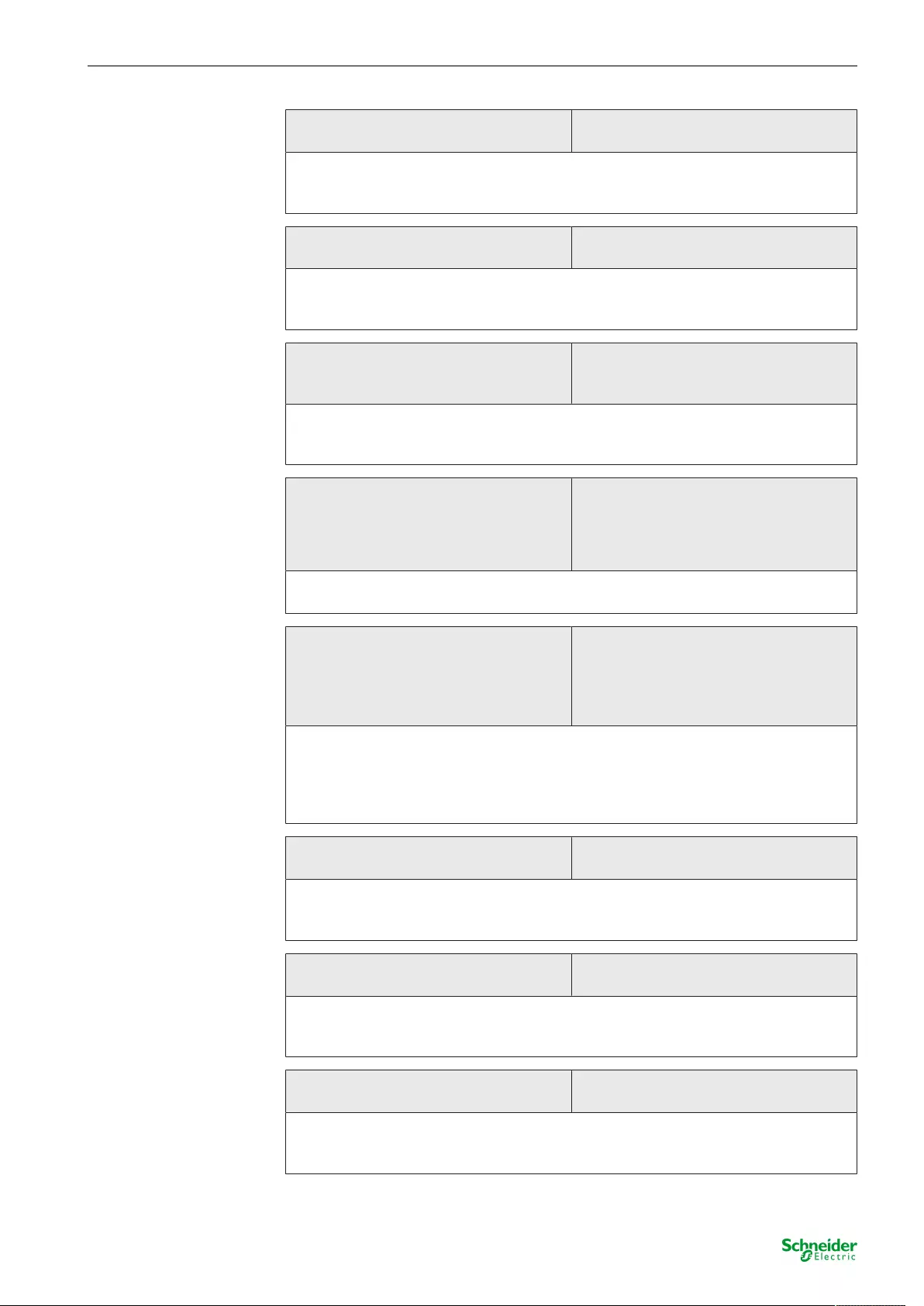
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
166 | MTN6730-0002 11.08.2020
Reset time heating, minutes (0 = inact-
ive) (0 ... 255)
0...150...255
Separate setting of the "Reset time" control parameter.
This parameter is only visible if "Type of heating = via control parameter" and the
heating control type "PI control".
Top hysteresis of the 2-point controller
heating (5 ... 127 x 0.1 K)
5...127
Definition of top hysteresis (switch-off temperatures) of the heating.
This parameter is only visible if "Type of heating control = Switching 2-point feed-
back control (ON/OFF)".
Bottom hysteresis of the
2-point controller heating (-128 ... –5 x
0.1 K)
-128...-5
Definition of bottom hysteresis (switch-on temperatures) of the heating.
This parameter is only visible if "Type of heating control = Switching 2-point feed-
back control (ON/OFF)".
Type of cooling control (if applicable, for
basic and additional level)
continuous PI control
switching PI control (PWM)
Switching 2-point feedback control (ON/
OFF)
Selecting a feedback control algorithm (PI or 2-point) with data format (1 byte or 1
bit) for the cooling system
Type of cooling (if applicable, for basic
and additional level)
Cooling ceiling (5 K / 240 min)
Fan coil unit (4 K / 90 min)
Split unit (4 K / 90 min)
via control parameter
Adapting the PI algorithm to different cooling systems using predefined values for
the proportional range and reset time control parameters.
With the "Using control parameters" setting, it is possible to set the control para-
meters in a manner deviating from the predefined values within specific limits.
This parameter is only visible if "Type of cooling control = PI control".
Proportional range cooling (10 ... 127 x
0.1 K)
10...50...127
Separate setting of the "Proportional range" control parameter.
This parameter is only visible if "Type of cooling = via control parameter" and the
cooling control type "PI control".
Reset time cooling, minutes (0 = inact-
ive) (0 ... 255)
0...150...255
Separate setting of the "Reset time" control parameter.
This parameter is only visible if "Type of cooling = via control parameter" and the
cooling control type "PI control".
Top hysteresis of the 2-point controller
cooling (5 ... 127 x 0.1 K)
5...127
Definition of top hysteresis (switch-on temperatures) of the cooling.
This parameter is only visible if "Type of cooling control = Switching 2-point feed-
back control (ON/OFF)".
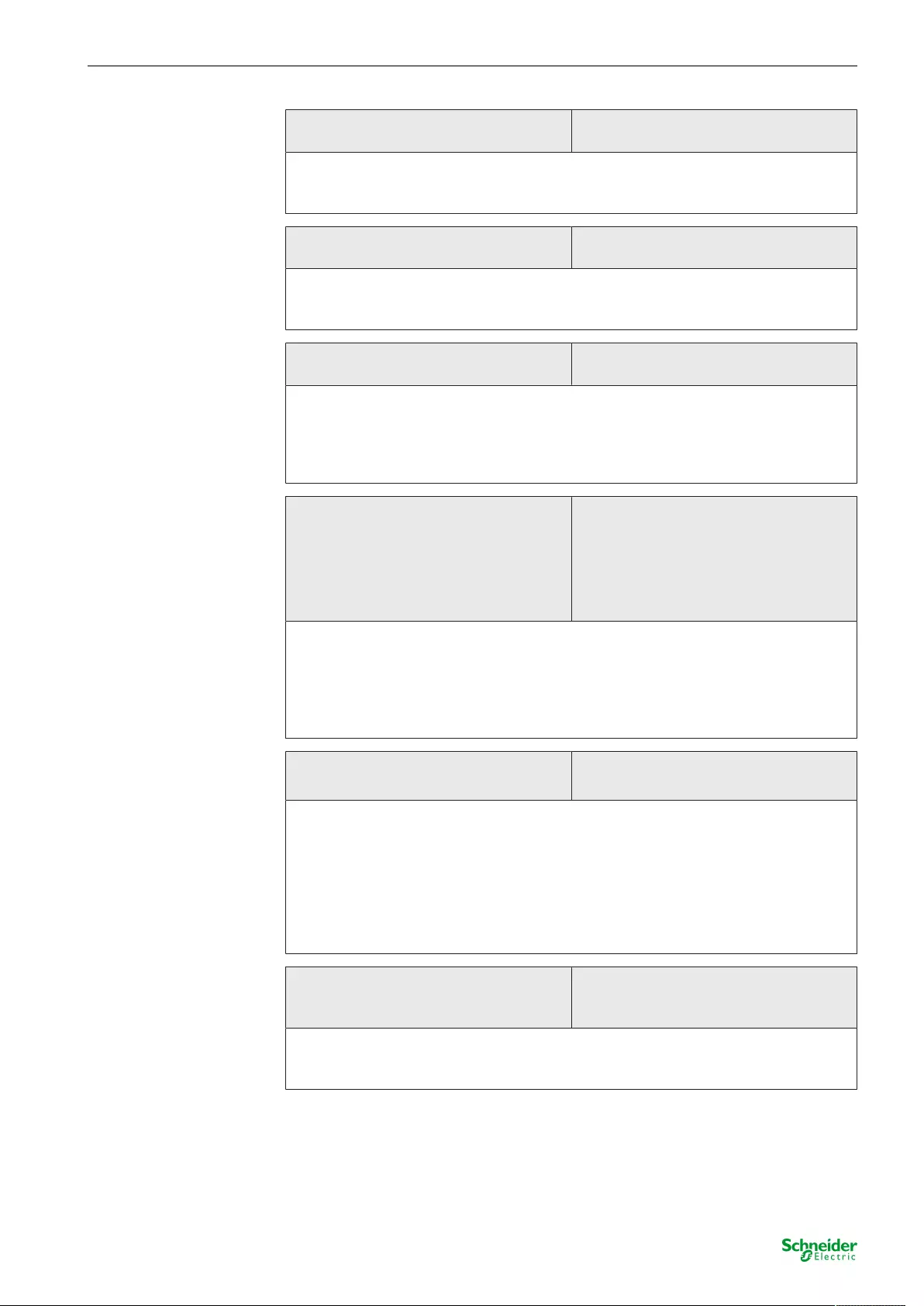
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
167 | MTN6730-0002 11.08.2020
Lower hysteresis of the 2-point controller
cooling (-128 ... –5 x 0.1 K)
-128...-5
Definition of bottom hysteresis (switch-off temperatures) of the cooling.
This parameter is only visible if "Type of cooling control = Switching 2-point feed-
back control (ON/OFF)".
Additional stage inhibit object yes
no
The additional stages can be separately disabled via the bus. The parameter en-
ables the disable object as necessary.
This parameter is only visible in two-level heating and cooling operation.
Operating mode switch-over via value (1 byte)
via switching (4 x 1 bit)
In the setting "via value (1-byte) the change-over of the operating modes via the
bus takes place according to the KNX specification via a 1-byte value object. In
addition, a higher-ranking forced object is available for this setting.
In the setting "via switching (4 x 1 bit)" the ‘classic’ change-over of the operating
modes via the bus is via four separate 1-bit objects.
Operation mode after reset Restore operating mode before reset
Comfort mode
Standby mode
Night operation
Frost/heat protection mode
This parameter specifies which operating mode is set immediately after a device
reset.
With "Restore operation mode before reset": The mode set before a reset accord-
ing to the operating mode object will be restored after the initializing phase of the
device. Operating modes set by a function with a higher priority before the reset
(Forced, Window status, Presence status) are not effected.
Change-over between heating and cool-
ing
automatic
via object (heating/cooling change-over)
In a configured mixed mode it is possible to switch over between heating and cool-
ing.
With "Automatic": Depending on the operating mode and the room temperature,
the change-over takes place automatically.
With "via object (heating/cooling change-over)": The change-over takes place only
via the object "Heating/cooling change-over".
With automatic setpoint presetting this parameter is permanently set to "Via object
(heating/cooling change-over)"!
Heating / cooling mode after a reset Heating
Cooling
Operating mode before reset
The preset operating mode for after a bus voltage return or an ETS programming
operation is specified here.
Only visible if "Switchover between heating and cooling = via object"!
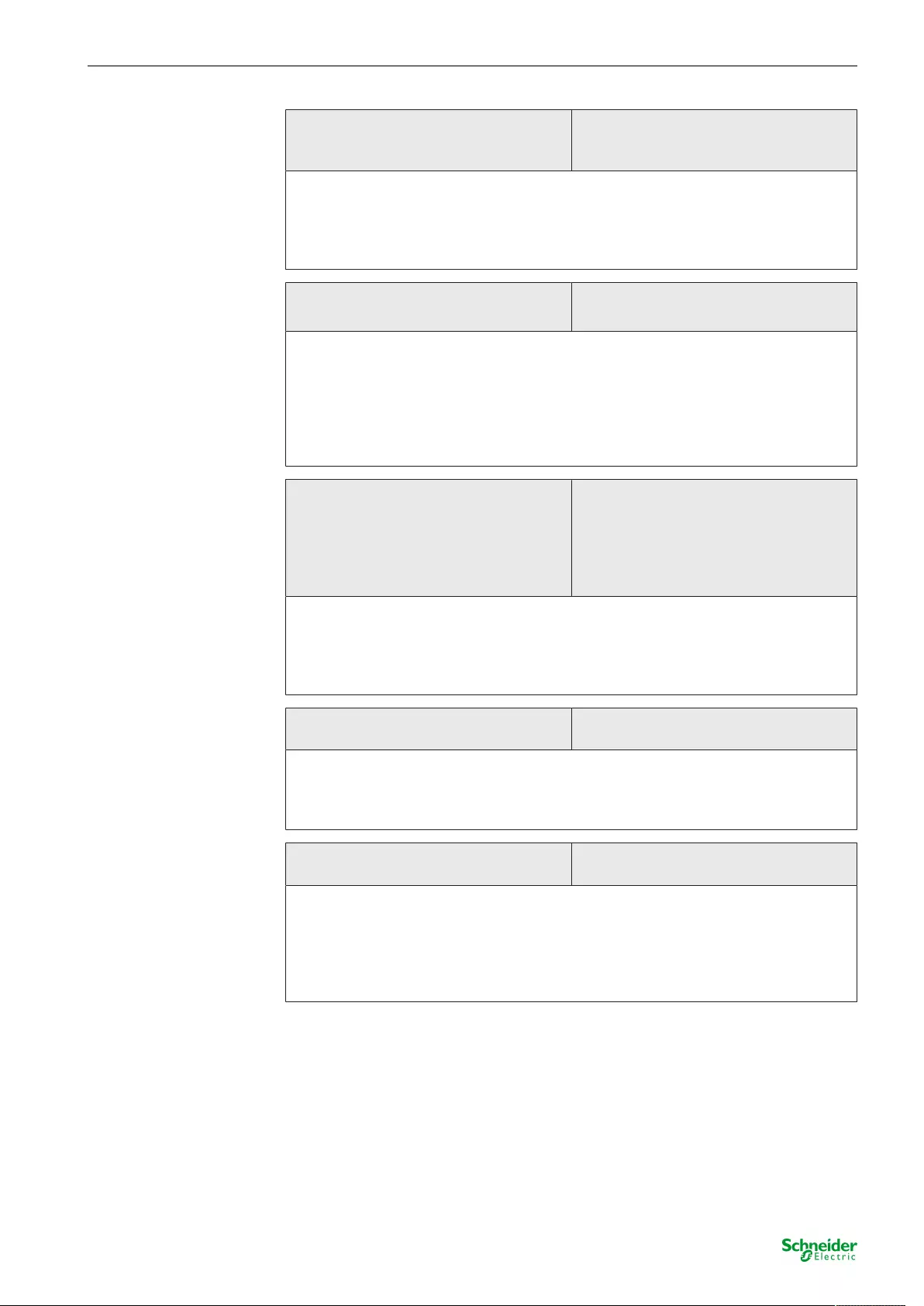
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
168 | MTN6730-0002 11.08.2020
Cyclical heating/cooling transmission
switchover minutes (0 = inactive)
(0...255)
0...255
This parameter specifies whether the current object status of the "Heating / cool-
ing change-over" object should be output cyclically to the bus on an automatic
change-over. The cycle time can be set here. The "0" setting deactivates the peri-
odic transmission of the object value.
Only visible if "Change-over between heating and cooling = automatic".
Frost/heat protection Automatic frost protection
via window status
Here it is possible to determine how the room temperature regulator switches into
the frost/heat protection.
With "automatic frost protection": the automatic frost protection is activated. De-
pending on the room temperature this allows an automatic switch-over into the
frost protection mode.
With "Via window status": switch-over into the frost/heat protection takes place via
the "window status" object.
Automatic frost protection temperature
drop
Off
0.2 K / min.
0.3 K / min.
0.4 K / min.
0.5 K / min.
0.6 K / min.
This parameter determines the decrease temperature by which the room temper-
ature has to decrease within one minute in order for the controller to switch into
the frost protection mode. The "OFF" setting will deactivate the frost protection
automatic.
Only visible if "frost/heat protection = Automatic frost protection"!
Frost protection period in autom.
mode(1...255) *1 min
1...20...255
The length of the automatic frost protection is defined here. After the preset time
has elapsed, the controller will return to the operating mode which was set before
frost protection. Re-triggering will not be possible.
Only visible if "frost/heat protection = Automatic frost protection"!
Window status delay, minutes, (0 = in-
active) (0...255)
0...255
This parameter defines the delay time for the window status. After the paramet-
erised time has elapsed after the window is opened the window status will be
changed and thus the frost/heat protection mode activated. Such delay can make
sense if short ventilation of the room by opening the window is not supposed to
change the operating mode.
Only visible if "Frost/heat protection = via window status"!
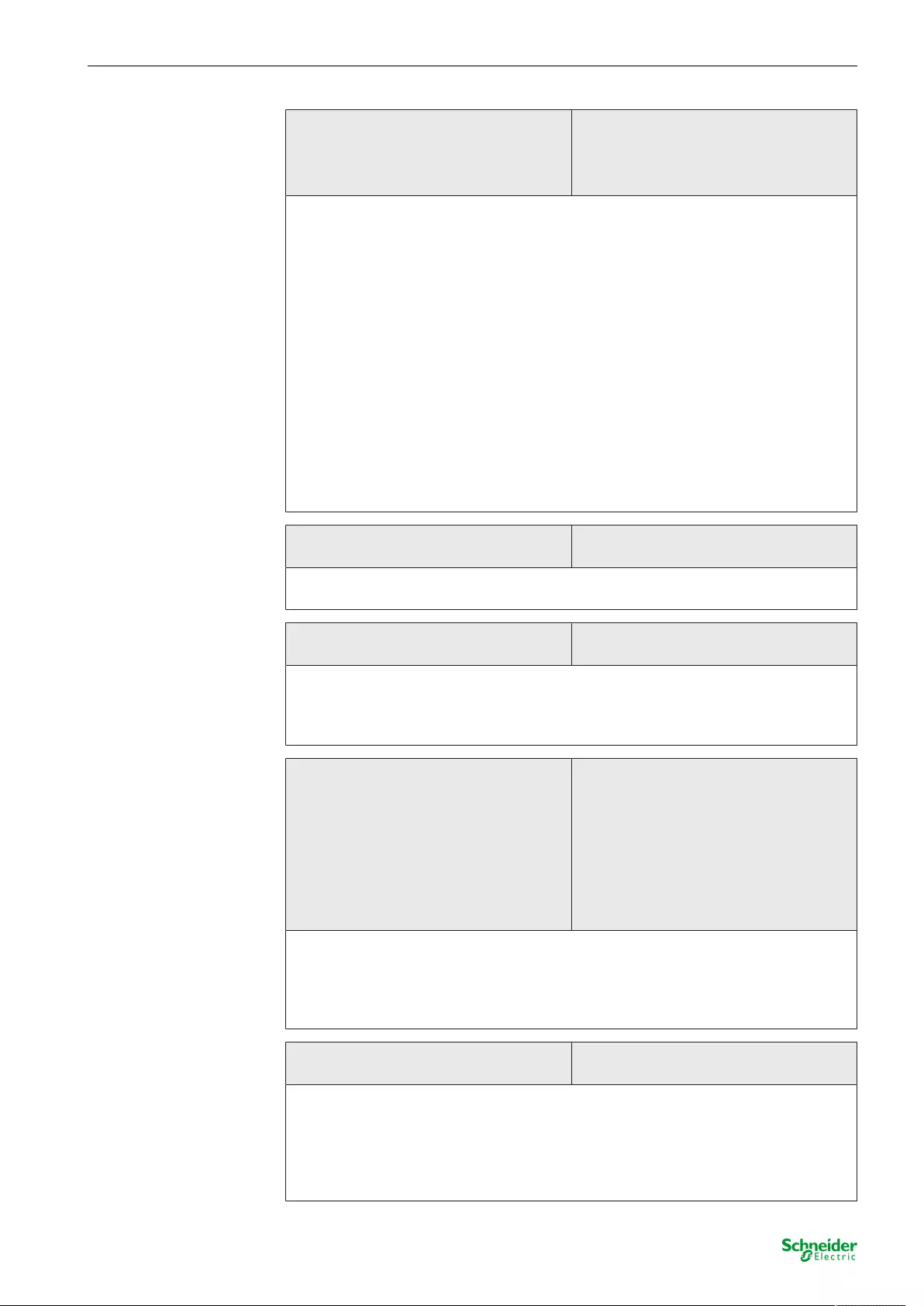
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
169 | MTN6730-0002 11.08.2020
Temperature detection of the room tem-
perature controller through
External
temperature value 1
External
temperature values 1 + 2
The controller detects the room temperatures using one or possibly two external
KNX temperature sensors (e.g. push-button sensors with temperature measure-
ment). Depending on the configuration, the 2-byte objects "Received temperature
1 (temperature sensor 1)" and, optionally, "Received temperature 2 (temperature
sensor 2)" are enabled. After a device reset, the controller will first wait for valid
temperature telegrams to both objects until control starts and a command value, if
applicable, is output.
Setting "External temperature value 1": The actual temperature is determined
solely via an external temperature value. In this case, the KNX temperature
sensor is connected to the controller via the 2-byte object "Received temperature
1 (Temperature sensor 1)".
Setting "External temperature values 1 + 2": The actual temperature is determined
using two external temperature values. The selected temperature sources are
combined. In this case, the KNX temperature sensors are connected to the con-
troller via the two 2-byte objects "Received temperature 1 (Temperature sensor 1)"
and "Received temperature 2 (Temperature sensor 2)".
Calibration of temperature value 1
(-128...127 x 0.1 K)
-128...0...127
Specifies the value by which the room temperature measured value of the first ex-
ternal KNX temperature sensor is calibrated.
Calibration of received temperat. value
(-128...127 x 0,1 K)
-128...0...12
Specifies the value by which the room temperature measured value of the second
external KNX temperature sensor is calibrated.
This parameter is only visible when the temperature detection system requires two
external temperature sensors.
Measured value formation temperature
value 1 to temperature value 2
10% to 90%
20% to 80%
30% to 70%
40% to 60%
50% to 50%
60% to 40%
70% to 30%
80% to 20%
90% to 10%
The weighting of the temperature values of the two external KNX temperature
sensors is specified here. That results in an overall value, which will be used for
the further interpretation of the room temperature.
This parameter is only visible when the temperature detection system requires two
external temperature sensors.
Request time temperature value minutes
(0 = inactive) (0...255)
0...255
The polling time for the external temperature value is specified here. In the "0" set-
ting, the temperature value is not automatically polled by the controller. In this
case the communication partner (e.g. controller extension) must transmit its tem-
perature value itself.
This parameter is only visible when the temperature detection system requires
only one temperature sensor.

SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
170 | MTN6730-0002 11.08.2020
Request time temperature values
minutes (0 = inactive) (0...255)
0...255
The polling time for both external temperature values is specified here. In the "0"
setting, the temperature values are not automatically polled by the controller. In
this case, the communication partners (e.g. controller extensions) must transmit
their temperature value themselves.
This parameter is only visible when the temperature detection system requires two
external temperature sensors.
Transmission on room temperature
change by (0 = inactive) (0..255 x 0,1 K)
0...3...255
This parameter specifies the temperature value by which the actual value has to
change in order to have the actual temperature value transmitted automatically via
the object. The "0" setting deactivates the automatic transmission of the actual
temperature.
Cyclical transmission of room temperat-
ure, minutes (0 = inactive) (0...255)
0...15...255
This parameter specifies whether and when the determined room temperature is
output cyclically via the "Actual temperature" object.
Overwrite setpoint in device during ETS
programming operation?
yes
no
The setpoint temperatures programmed in the room temperature controller by the
ETS during commissioning can be changed via communication objects. This para-
meter can be used to define whether the setpoints present in the device, which
may have been changed subsequently, are overwritten during an ETS program-
ming operation and thus replaced again by the values parameterised in the ETS. If
this parameter is "Yes", then the setpoint temperatures are deleted in the device
during a programming operation and replaced by the values of the ETS. If this
parameter is configured to "No", then setpoints present in the device remain un-
changed. The setpoint temperatures entered in the ETS then have no signific-
ance.
Setpoint presetting relative (setpoint temperatures from ba-
sic setpoint)
absolute (independent setpoint temper-
atures)
It is possible to configure the setpoints for the "Comfort", "Standby" and "Night"
modes directly (absolute setpoint presetting) or relatively (derivation from basic
setpoint). This parameter defines the way the setpoint temperature is preset.
With "Relative": All temperature setpoints are derived from the basic temperature
(basic setpoint).
With "Absolute": The setpoint temperatures are independent of each other. Differ-
ent temperature values can be specified for each operating mode and heating/
cooling mode.
Basic temperature after reset (7,0 ...
40.0 °C)
21.0
This parameter defines the temperature value to be applies as the basic setpoint
after commissioning by the ETS. All the temperature setpoints are derived from
the basic setpoint.
This parameter is only visible with relative setpoint presetting!

SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
171 | MTN6730-0002 11.08.2020
Permanently apply change to basic set-
point shift
yes
no
In addition to specifying individual setpoint temperatures by the ETS or basic set-
point object, the user can shift the basic setpoint in a specific range via a commu-
nication object. Whether a basic setpoint shifting only affects the currently active
operating mode or whether it influences all other setpoint temperatures of the re-
maining operating modes is determined by this parameter.
In the "yes" setting, the shift of the basic setpoint carried out affects all operating
modes. The shift is maintained even after a switchover of the operating mode or
the heating/cooling mode or adjusting the basic setpoint.
In the "no" setting, the basic setpoint shift carried out is in effect for only as long as
the operating mode or heating/cooling mode has not changed or the basic setpoint
is maintained. Otherwise the setpoint shift will be reset to "0".
This parameter is only visible with relative setpoint presetting!
Changing the setpoint of the basic tem-
perature
deactivated
approve via bus
Here, it is possible to specify if it is possible to change the basic setpoint via the
bus.
This parameter is only visible with relative setpoint presetting!
Permanently apply change to basic tem-
perature setpoint?
yes
no
One has to distinguish between two cases, defined by this parameter, if the basic
setpoint has been modified via the object. This parameter is only visible with relat-
ive setpoint presetting!
When "Yes": If, with this setting, the setpoint temperature is adjusted, the control-
ler saves the value permanently to the permanent storage. The newly adjusted
value will overwrite the initial value, i.e. the basic temperature originally configured
via the ETS after a reset! The changed values are also retained after a device re-
set, after a switchover of the operating mode or after a switchover of the heating/
cooling mode.
When "no": The setpoints set on the room temperature controller or received via
the objects remain active only temporarily. In case of a bus voltage failure, after a
switchover to another operating mode (e.g. Comfort to Standby, or also Comfort to
Comfort), or after a switchover of the operating mode (e.g. Heating to Cooling),
the last setpoint changed will be discarded and replaced by the initial value.
Dead band position symmetrical
asymmetrical
With relative setpoint presetting, the comfort setpoint temperatures for the operat-
ing mode "Heating and cooling" are derived from the basic setpoint in considera-
tion of the adjusted Dead band. The deadband (temperature zone for which there
is neither heating nor cooling) is the difference between the comfort setpoint tem-
peratures.
Symmetrical setting: the deadband preset in the ETS plug-in is divided in two
parts at the basic setpoint. The comfort setpoint temperatures are derived directly
from the basic setpoint resulting from the half deadband (Basic setpoint - 1/2
deadband = Heating comfort temperature or Basic setpoint + 1/2 deadband =
Cooling comfort temperature).
Asymmetrical setting: with this setting the comfort setpoint temperature for heating
equals the basic setpoint! The preset deadband is effective only from the basic
setpoint in the direction of comfort temperature for cooling. Thus the comfort set-
temperature for cooling is derived directly from the comfort setpoint for heating.
The parameter is only visible in the "Heating and cooling" operating mode (if ne-
cessary with additional levels) and only with relative setpoint presetting!

SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
172 | MTN6730-0002 11.08.2020
Deadband between heating and cooling
(0...127) x 0.1 K
0...20...127
With relative setpoint presetting, the comfort setpoint temperatures for heating and
cooling are derived from the basic setpoint in consideration of the adjusted Dead
band. The deadband (temperature zone for which there is neither heating nor
cooling) is the difference between the comfort setpoint temperatures. It is set us-
ing this parameter.
The parameter is only visible in the "Heating and cooling" operating mode (if ne-
cessary with additional levels) and only with relative setpoint presetting!
Setpoint temperature comfort mode
(heating) (7,0 °C...40,0 °C)
21.0
With absolute setpoint presetting the setpoint temperatures for comfort, standby
and night mode are independent of each other. Depending on the operating mode
and heating/cooling mode, various temperature values can be specified in the
ETS within the range +7.0 °C to +40.0 °C. The ETS does not validate the temper-
ature values. It is thus possible, for example, to select smaller setpoint temperat-
ures for cooling mode than for heating mode, or to specify lower temperatures for
comfort mode than for standby mode. After commissioning using the ETS the set-
point temperatures can be changed via the bus by means of temperature tele-
grams. This can be done using the communication object "Setpoint active operat-
ing mode".
Presetting of the setpoint temperature for the comfort heating mode.
These parameters are only visible with absolute setpoint presetting!
Setpoint temperature standby mode
(heating) (7,0 °C...40,0 °C)
19.0
Presetting of the setpoint temperature for standby mode (heating).
Setpoint temperature night mode (heat-
ing) (7,0 °C...40,0 °C)
17.0
Presetting of the setpoint temperature for night mode (heating).
Setpoint temperature comfort mode
(cooling) (7,0 °C...40,0 °C)
23.0
Presetting of the setpoint temperature for standby mode (cooling).
Setpoint temperature standby mode
(cooling) (7,0 °C...40,0 °C)
25.0
Presetting of the setpoint temperature for standby mode (cooling).
Setpoint temperature night mode (cool-
ing) (7,0 °C...40,0 °C)
27.0
Presetting of the setpoint temperature for night mode (cooling).
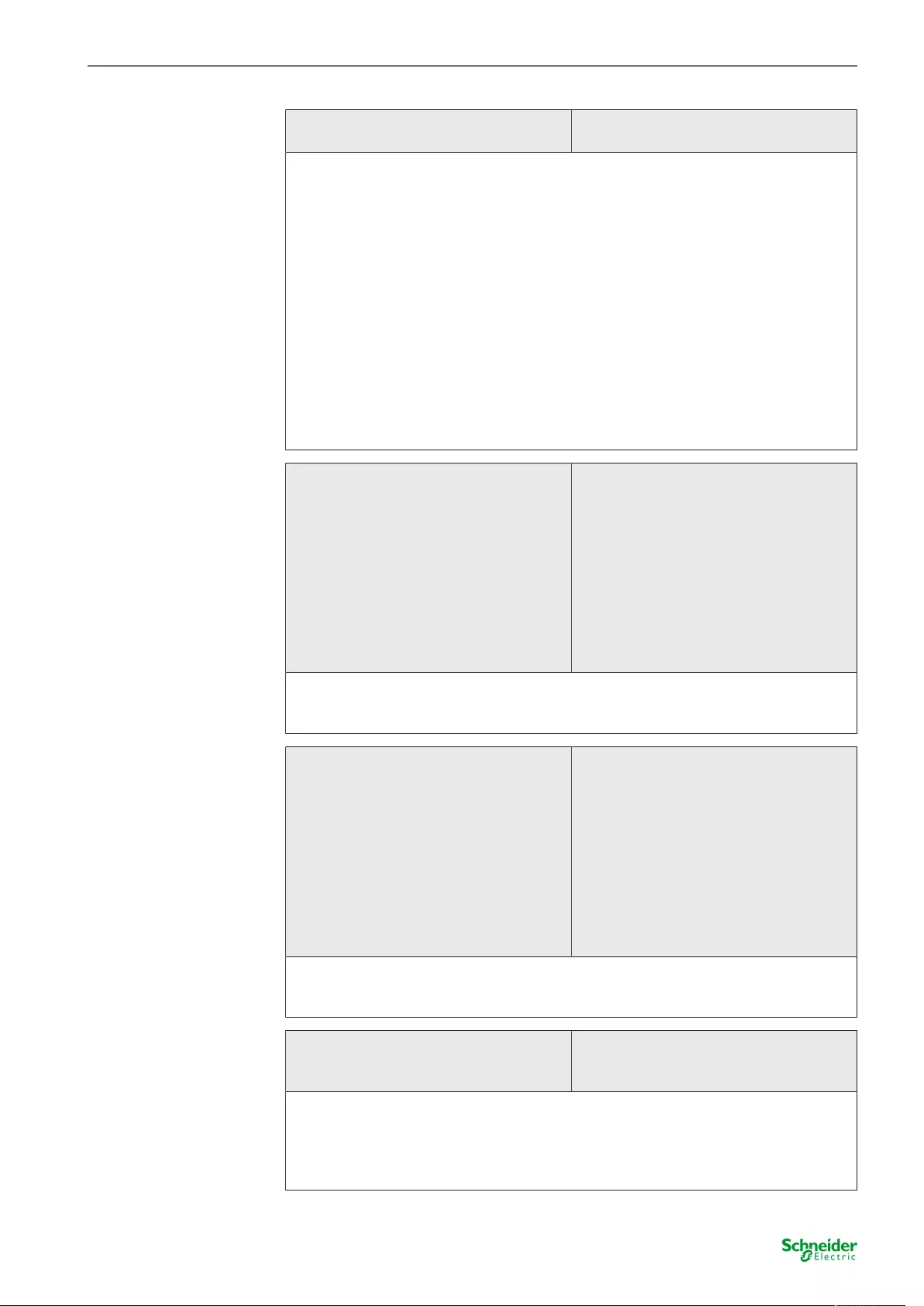
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
173 | MTN6730-0002 11.08.2020
Accept modification of the setpoint per-
manently?
yes
no
One has to distinguish between two cases, defined by this parameter, if the set-
point has been modified via the object. This parameter is only visible with absolute
setpoint presetting!
When "Yes": If, with this setting, the setpoint temperature is adjusted, the control-
ler saves the value permanently to the permanent storage. The newly adjusted
value will overwrite the initial value, i.e. the absolute setpoint temperature origin-
ally loaded using the ETS. The changed values are also retained after a device re-
set, after a switchover of the operating mode or after a switchover of the heating/
cooling mode (with absolute setpoint specification individually for each operating
mode for heating and cooling).
When "No": The setpoints received via the object remain active only temporarily.
In case of a bus voltage failure, after a switchover to another operating mode (e.g.
Comfort to Standby, or also Comfort to Comfort), or after a switchover of the oper-
ating mode (e.g. Heating to Cooling), the last setpoint changed will be discarded
and replaced by the initial value.
Upward adjustment of the basic setpoint
temperature (0...10 x 1 K)
0 K
+ 1 K
+ 2 K
+ 3 K
+ 4 K
+ 5 K
+ 6 K
+ 7 K
+ 8 K
+ 9 K
+ 10 K
This is used to define the maximum range in which the basic setpoint temperature
can be adjusted upwards.
This parameter is only visible with relative setpoint presetting!
Downward adjustment of the basic set-
point temperature (0...10 x 1 K)
0 K
- 1 K
- 2 K
- 3 K
- 4 K
- 5 K
- 6 K
- 7 K
- 8 K
- 9 K
- 10 K
This is used to define the maximum range in which the basic setpoint temperature
can be adjusted downwards.
This parameter is only visible with relative setpoint presetting!
Lower the setpoint temperature during
Standby operating mode (heating)
(-128...0 x 0.1 K)
-128...-20...0
The value by which the standby setpoint temperature for heating is lowered com-
pared to the heating comfort temperature.
The parameter is only visible in the "Heating" or "Heating and cooling" operating
mode (if necessary with additional levels) and only with relative setpoint preset-
ting.
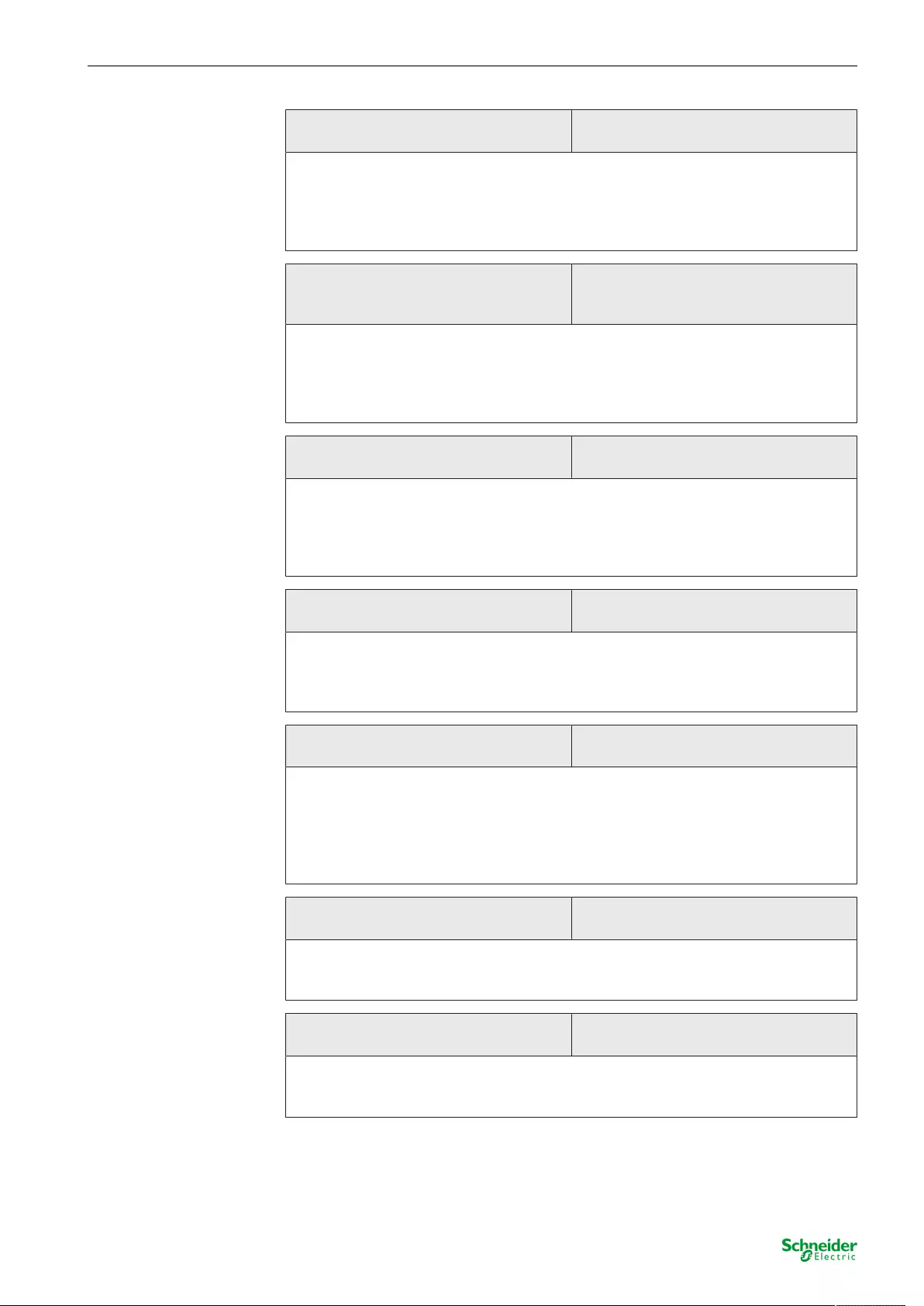
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
174 | MTN6730-0002 11.08.2020
Lower the setpoint temperature during
Night mode (heating) (-128...0 x 0,1 K)
-128...-40...0
The value by which the night setpoint temperature for heating is lowered com-
pared to the heating comfort temperature.
The parameter is only visible in the "Heating" or "Heating and cooling" operating
mode (if necessary with additional levels) and only with relative setpoint preset-
ting.
Raise the setpoint temperature during
Standby operating mode (cooling)
(0...127 x 0,1 K)
0...20...127
The value by which the standby setpoint temperature for cooling is lowered com-
pared to the cooling comfort temperature.
The parameter is only visible in the "Heating" or "Heating and cooling" operating
mode (if necessary with additional levels) and only with relative setpoint preset-
ting.
Raise the setpoint temperature during
Night mode (cooling) (0...127 x 0,1 K)
0...40...127
The value by which the night temperature for cooling is lowered compared to the
cooling comfort temperature.
The parameter is only visible in the "Heating" or "Heating and cooling" operating
mode (if necessary with additional levels) and only with relative setpoint preset-
ting.
Difference between basic and additional
stages (0...127 x 0.,1 K)
0...20...127
In a two stage control mode it is necessary to determine the temperature differ-
ence to the basic stage with which the additional stage is to be incorporated into
the control This parameter defines the level spacing.
The parameter can only be seen in two-level control operation.
Step width of the setpoint shift 0.1 K
0.5 K
This parameter defines the value of a level of the setpoint shift. With a setpoint
shift, the basic setpoint (with relative setpoint specification) is changed by the tem-
perature value configured here when there is an adjustment by one step in a posit-
ive or negative direction. The controller module rounds the temperature values re-
ceived via the "Basic Setpoint" object and matches the values to the step width
configured here.
Setpoint temperature frost protection
(7,0...40,0 °C)
7.0
This parameter specifies the setpoint temperature for frost protection. The para-
meter is only visible in "Heating" or "Heating and cooling" operating modes (if ne-
cessary with additional levels).
Setpoint temperature heat protection
(7,0...45,0 °C)
35.0
This parameter specifies the setpoint temperature for heat protection. The para-
meter is only visible in "Cooling" or "Heating and cooling" operating modes (if ne-
cessary with additional levels).
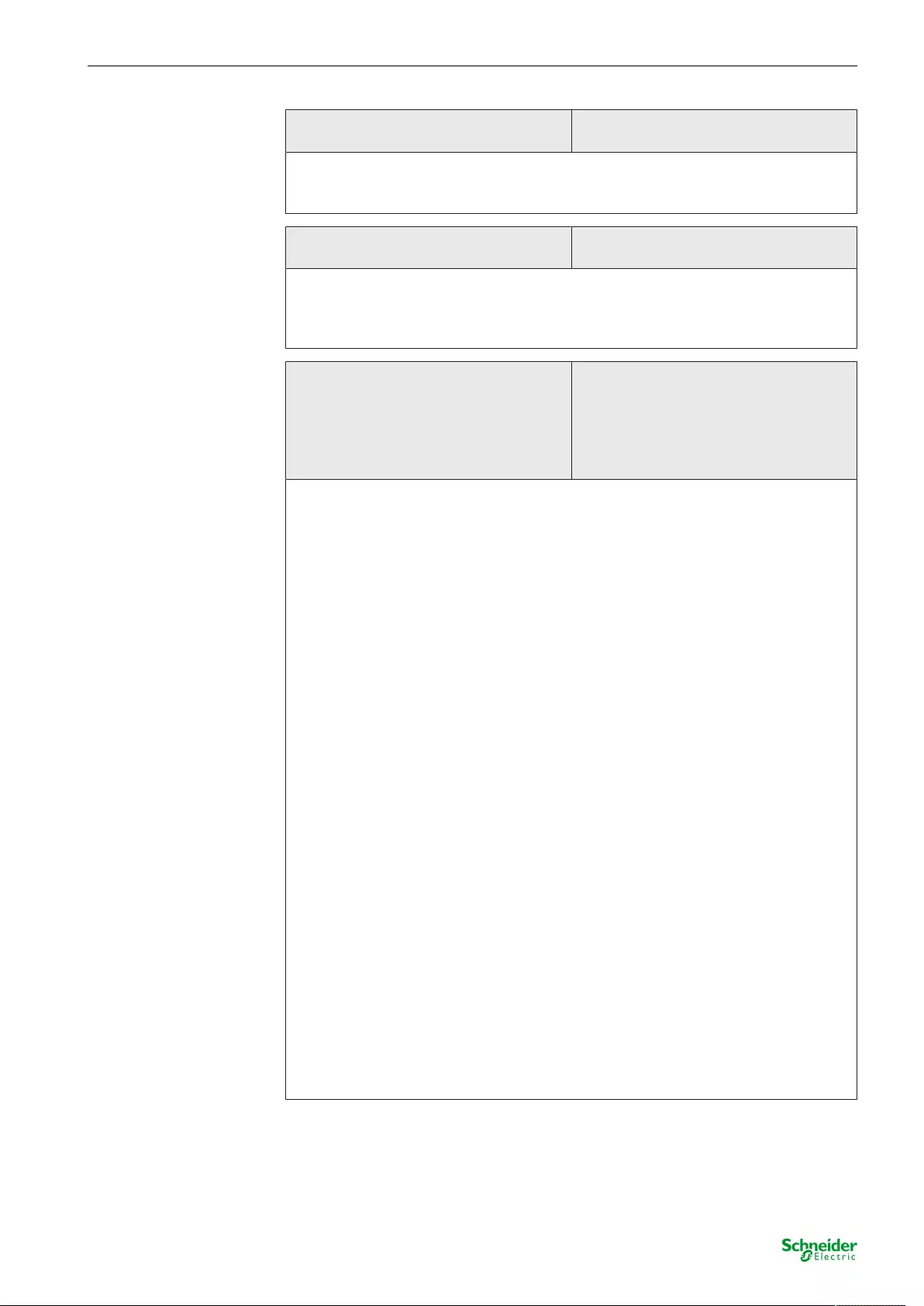
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
175 | MTN6730-0002 11.08.2020
Transmission at setpoint temperature
change by (0...255 x 0,1 K)
0...1...255
Determines the size of the value change required to automatically transmit the
current value via the "Setpoint temperature" object. In the "0" setting, the setpoint
temperature is not transmitted automatically when there is a change.
Cyclical transmission of setpoint temper-
ature, minutes (0 = inactive) (0...255)
0...255
This parameter determines whether the setpoint temperature is to be transmitted
periodically via the "Setpoint temperature" object. Definition of the cycle time by
this parameter In the "0" setting, the setpoint temperature is not transmitted auto-
matically cyclically.
Setpoint temperature limit in cooling op-
eration
no limit
Only difference to outdoor temperature
Only max. setpoint temperature
Max. setpoint and difference to outdoor
temperature
Optionally, the setpoint temperature limit can be enabled here, which is only ef-
fective in cooling operation. If necessary, the controller limits the setpoint temper-
ature to specific values and prevents an adjustment beyond the limits.
"Only difference to outdoor temperature" setting, the outdoor temperature is mon-
itored and compared to the active setpoint temperature in this setting. The spe-
cification of the maximum temperature difference to the outdoor temperature is
made using the "Difference to outdoor temperature in cooling mode" parameter. If
the outdoor temperature rises above 32 °C, then the controller activates the set-
point temperature limit. It then permanently monitors the outdoor temperature and
raises the setpoint temperature so that is beneath the outdoor temperature by the
amount configured. Should the outdoor temperature continue rise, the controller
raises the setpoint temperature until the required difference to the outdoor temper-
ature is achieved, or, at most, the heat protection temperature. It is then not pos-
sible to undershoot the raised setpoint, e.g. by changing the basic setpoint
change. The change to the setpoint temperature limit is temporary. It only applies
for as long as the outdoor temperature exceeds 32 °C.
"Only max. setpoint temperature" setting: In this setting, no setpoint temperatures
are permitted in Cooling mode related to the Comfort, Standby and Night modes,
which are greater than the maximum setpoints configured in the ETS. The max-
imum temperature setpoint is specified by the "Max. setpoint temperature in cool-
ing operation" parameter. With an active limit, no larger setpoint can be set in
cooling operation, e.g. by a basic setpoint change or a setpoint shift. However,
heat protection is not influenced by the setpoint temperature limit.
"Max. setpoint temperature and difference to outdoor temperature" setting: This
setting is a combination of the two above-mentioned settings. In the downward dir-
ection, the setpoint temperature is limited by the maximum outdoor temperature
difference, whilst in the upward direction, the limit is made by the maximum set-
point. The maximum setpoint temperature has priority over the outdoor temperat-
ure difference. This means that the controller keeps on raising the setpoint tem-
perature upwards according to the difference to the outdoor temperature con-
figured in the ETS until the maximum setpoint temperature or the heat protection
temperature is exceeded. Then the setpoint is limited to the maximum value.
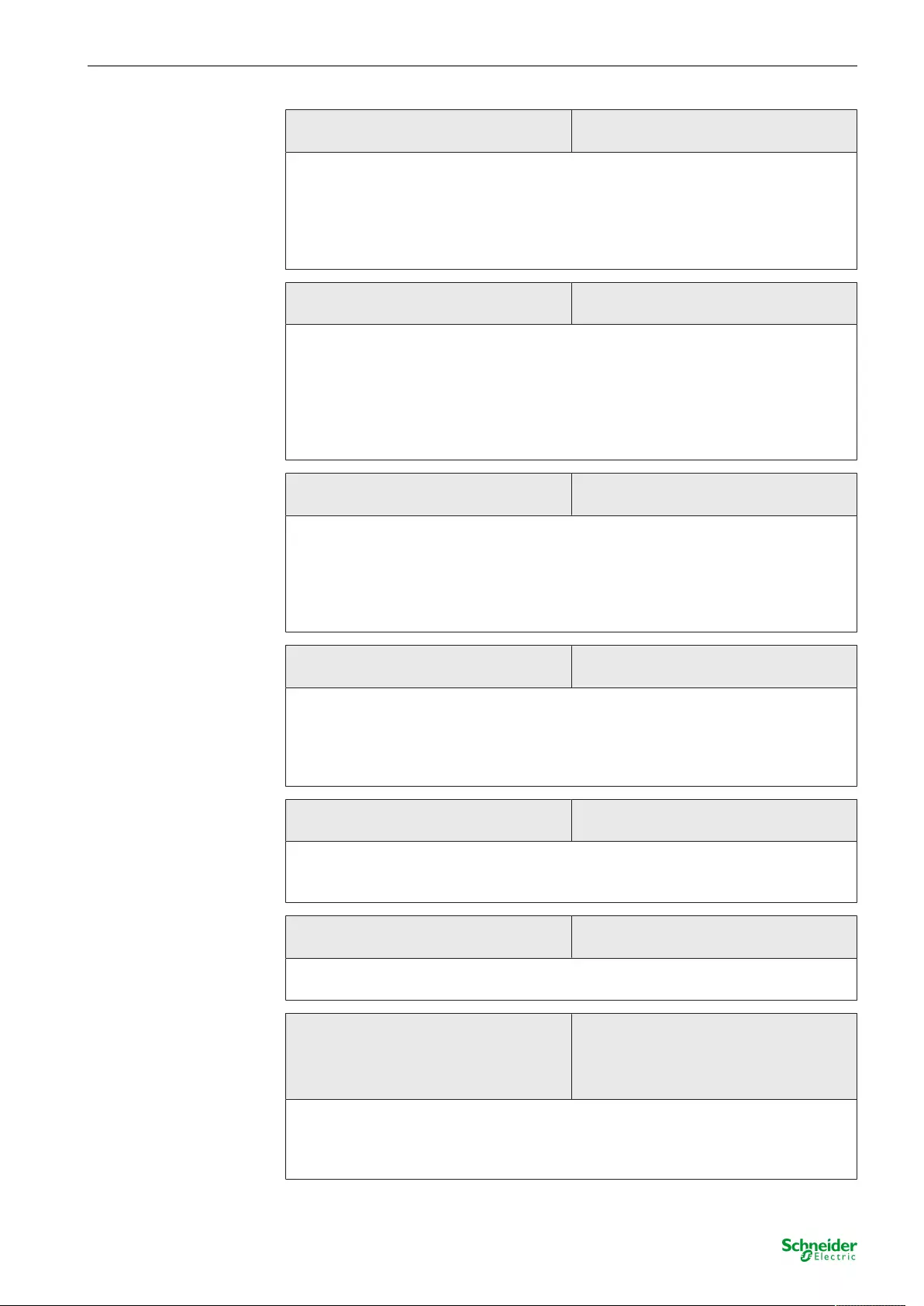
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
176 | MTN6730-0002 11.08.2020
Activation of the setpoint temperature
limit in cooling operation via object?
no
yes
A setpoint limit enabled in the ETS can be activated or deactivated as necessary
using a 1-bit object. For this, this parameter can be set to "Yes". In this case, the
controller only takes the setpoint limit into account, if it has been enabled via the
object "Cooling setpoint temperature limit" ("1" telegram). If the limitation is not en-
abled ("0" telegram), the cooling setpoint temperatures are not limited.
This parameter is visible only if setpoint temperature monitoring is enabled.
Difference to outdoor temperature in
cooling operation (1...15 K)
1 K...6 K...15 K
This parameter defines the maximum difference between the setpoint temperature
in Comfort mode and the outdoor temperature with an active setpoint temperature
limit.
This parameter is visible only if setpoint temperature monitoring is enabled. How-
ever, this is only if the parameter "Setpoint temperature limit in cooling operation"
is then set to "Only difference to outdoor temperature" or "Max. setpoint temperat-
ure and difference to outdoor temperature".
Maximum setpoint temperature in cool-
ing operation
20°C...26°C...35°C
This parameter defines the maximum setpoint temperature in Comfort mode with
an active setpoint temperature limit.
This parameter is visible only if setpoint temperature monitoring is enabled. How-
ever, this is only if the parameter "Setpoint temperature limit in cooling operation"
is then set to "Only max. setpoint temperature" or "Max. setpoint temperature and
difference to outdoor temperature".
Automatic transmission on change by (0
= inactive) (0...100 %)
0...3...100
This parameter determines the size of the command value change that will auto-
matically transmit continuous command value telegrams via the command value
objects. Thus this parameter only affects command values which are configured to
"Continuous PI control" and to the 1 byte additional command value objects of the
"Switching PI control (PWM)".
Cycle time of the switching command
value minutes (1...255)
1...15...255
This parameter specifies the cycle time for the pulse width modulated command
value (PWM). Thus this parameter only affects command values which are con-
figured to "Switching PI control (PWM)".
Cycle time for automatic transmission (0
= inactive) (0...255)
0...10...255
This parameter determines the time interval for the cyclical transmission of the
command values via all command value objects.
Output of the heating variable inverted (under current, this means
closed)
normal (under current, this means
opened)
At this point, it is possible to specify whether the command value telegram for
heating is output normally or in inverted form.
This parameter is only visible if the operating mode "Heating" or "Heating and
cooling" is configured and not two-level operation.
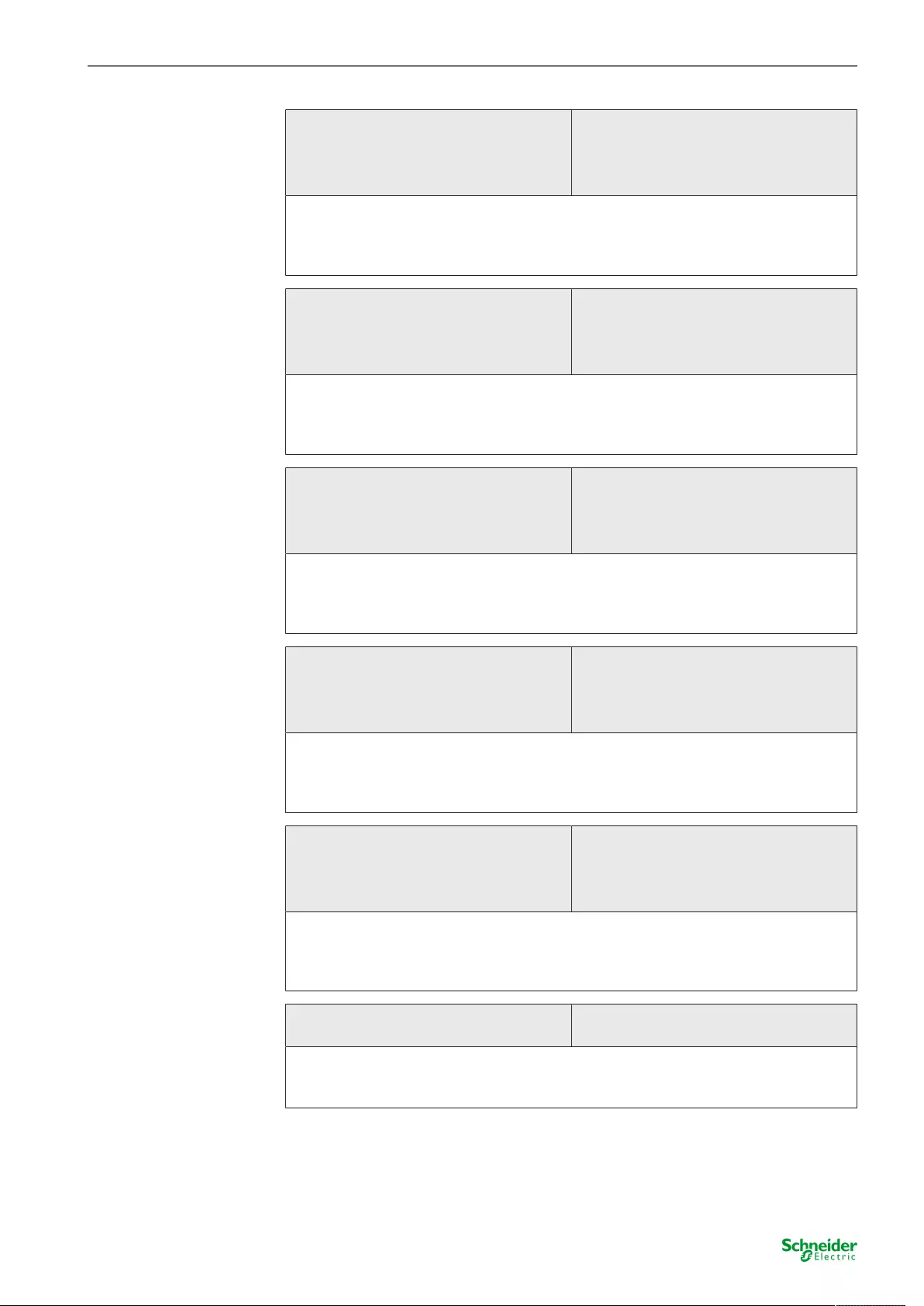
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
177 | MTN6730-0002 11.08.2020
Output of the command value basic level
heating
inverted (under current, this means
closed)
normal (under current, this means
opened)
At this point, it is possible to specify whether the command value telegram for the
heating basic level is output normally or in inverted form.
This parameter is only visible if the operating mode "Heating" or "Heating and
cooling" is configured along with two-level operation.
Output of the heating additional stage
variable
inverted (under current, this means
closed)
normal (under current, this means
opened)
At this point, it is possible to specify whether the command value telegram for the
heating additional level is output normally or in inverted form.
This parameter is only visible if the operating mode "Heating" or "Heating and
cooling" is configured along with two-level operation.
Output of the cooling variable inverted (under current, this means
closed)
normal (under current, this means
opened)
At this point, it is possible to specify whether the command value telegram for
cooling is output normally or in inverted form.
This parameter is only visible if the operating mode "Cooling" or "Heating and
cooling" is configured and not two-level operation.
Output of the command value basic level
cooling
inverted (under current, this means
closed)
normal (under current, this means
opened)
At this point, it is possible to specify whether the command value telegram for the
cooling basic level is output normally or in inverted form.
This parameter is only visible if the operating mode "Cooling" or "Heating and
cooling" is configured along with two-level operation.
Output of the cooling additional stage
variable
inverted (under current, this means
closed)
normal (under current, this means
opened)
At this point, it is possible to specify whether the command value telegram for the
cooling additional level is output normally or in inverted form.
This parameter is only visible if the operating mode "Cooling" or "Heating and
cooling" is configured along with two-level operation.
Heating indication yes
no
Depending on the set operating mode, a separate object can be used to signal
whether the controller is currently demanding heating energy and is thus actively
heating. The "Yes" setting here enables the message function for heating.
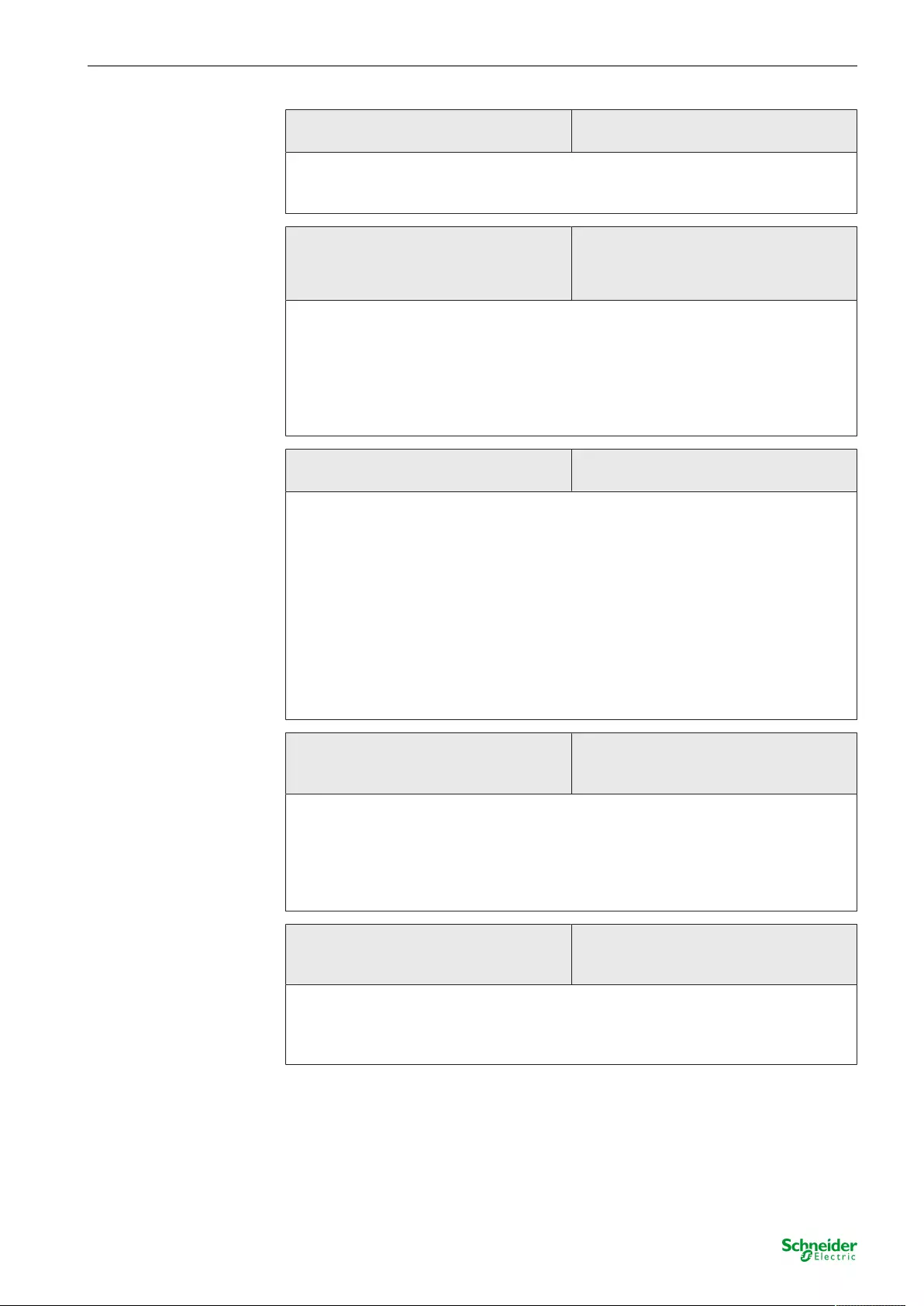
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
178 | MTN6730-0002 11.08.2020
Cooling indication yes
no
Depending on the set operating mode, a separate object can be used to signal
whether the controller is currently demanding cooling energy and is thus actively
cooling. The "Yes" setting here enables the message function for cooling.
Command value limit deactivated
continuously activated
can be activated via object
The command value limit allows the restriction of calculated command values to
the range limits "minimum" and "maximum". The limits are permanently set in the
ETS and, if command value limitation is active, can be neither undershot or ex-
ceeded during device operation.
The "Command value limit" parameter defines the mode of action of the limiting
function. The command value limit can either be activated or deactivated using the
1-bit communication object "Command value limit", or be permanently active.
Command value limit after reset deactivated
activated
When controlling via the object, it is possible to have the controller activate the
command value limit automatically after bus voltage return or an ETS program-
ming operation. This parameter defines the initialisation behaviour here.
In the "Deactivated" setting, the command value limit is not automatically activated
after a device reset. A "1" telegram must first be received via the "Command value
limit" object for the limit to be activated.
In the "Activated" setting, the controller activates the command value limit auto-
matically after a device reset. To deactivate the limit a "0" telegram must be re-
ceived via the "Command value limit" object. The limit can be switched on or off at
any time using the object.
This parameter is only visible with "Command value limit = can be activated via
object"!
Minimum command value for heating
(optionally also for basic and additional
level)
5%, 10%, 15%, 20%, 25%, 30%, 35%,
40%, 45%, 50%
The "Minimum command value" parameter specifies the lower command value
limiting value for heating. With an active command value limit, the set minimum
command value is not undershot by command values. If the controller calculates
smaller command values, it sets the configured minimum command value. The
controller transmits a 0% command value if no more heating or cooling energy has
to be demanded.
Maximum command value for heating
(optionally also for basic and additional
level)
55%, 60%, 65%, 70%, 75%, 80%, 85%,
90%, 95%, 100%
The "Maximum command value" parameter specifies the upper command value
limiting value for heating. With an active command value limit, the set maximum
command value is not exceeded. If the controller calculates larger command val-
ues, it sets the configured maximum command value.
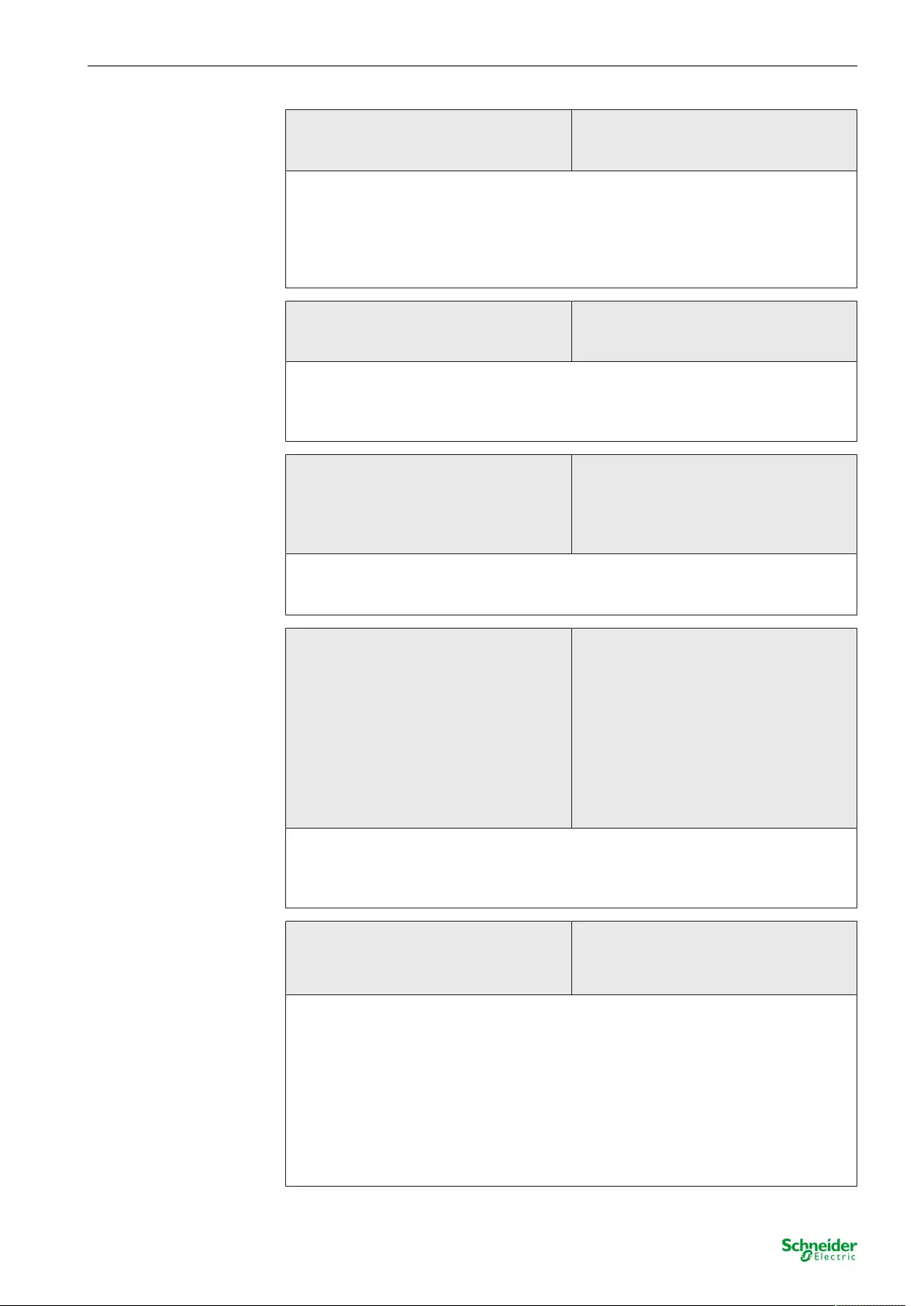
SpaceLogic KNX Valve Drive Controller Parameters for room temperature controllers
179 | MTN6730-0002 11.08.2020
Minimum command value for cooling
(optionally also for basic and additional
level)
5%, 10%, 15%, 20%, 25%, 30%, 35%,
40%, 45%, 50%
The "Minimum command value" parameter specifies the lower command value
limiting value for cooling. With an active command value limit, the set minimum
command value is not undershot by command values. If the controller calculates
smaller command values, it sets the configured minimum command value. The
controller transmits a 0% command value if no more heating or cooling energy has
to be demanded.
Maximum command value for cooling
(optionally also for basic and additional
level)
55%, 60%, 65%, 70%, 75%, 80%, 85%,
90%, 95%, 100%
The "Maximum command value" parameter specifies the upper command value
limiting value for cooling. With an active command value limit, the set maximum
command value is not exceeded. If the controller calculates larger command val-
ues, it sets the configured maximum command value.
Controller status no status
KNX compliant
Controller general
transmit individual state
The room temperature controller can transmit its current status to the KNX. A
choice of data formats is available for this. This parameter enables the status sig-
nal and sets the status format.
Single status Comfort operation activated
Standby mode activated
Night mode activated
Frost/heat protection active
Controller disabled
Heating / cooling
Controller inactive
Frost alarm
Here, the status information is defined which is to be transmitted onto the bus as
the 1-bit controller status.
This parameter is only visible if the parameter "Controller status" is set to "Trans-
mit single status".
Presence detection none
Presence button
Presence detector
In the "None" setting, the presence mode is deactivated.
In the "Presence button" setting, presence detection takes place using the "Pres-
ence button" object (e.g. other push-button sensors). When the presence button is
pressed from the night mode or frost/heat protection, the comfort extension is ac-
tivated. If the presence button is pressing in standby mode, the controller activates
the comfort mode for the duration of the presence mode.
In the "Presence detector" setting, presence detection takes place using an ex-
ternal presence detector, coupled to the "Presence detector" object. Comfort
mode is recalled when a presence is detected. Comfort mode remains active until
the presence detector ceases to detect movement.

SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
180 | MTN6730-0002 11.08.2020
Duration of comfort extension (minutes,
0 = OFF) (0 .. 255)
0...30...255
When the presence button is pressed from the Night mode or Frost/heat protec-
tion, the controller switches to Comfort mode for the length of time specified here.
When this time has elapsed, it switches back automatically. In the "0" setting, the
comfort extension is switched off, meaning that it cannot be activated from Night
or Frost/heat protection mode. In this case, the operating mode will not be
changed, although the presence function has been activated.
This parameter is only visible when presence detection is configured to "Presence
button".
Switch off controller (dew point opera-
tion)
no
via bus
This parameter enables the "Disable controller" object. If the controller is disabled,
there is no feedback control until enabled (command values = 0).
Underfloor heating temperature limit not present
present
The temperature limit can be activated in the controller in order to protect an un-
derfloor heating system. If the temperature limit is enabled here ("Present" set-
ting), the controller continuously monitors the floor temperature. Should the floor
temperature exceed a specific limiting value on heating, the controller switches the
command value off immediately, thus switching the heating off and cooling the
system. Only when the temperature falls below the limiting value, minus a hyster-
esis of 1 K, will the controller add the most recently calculated command value.
The floor temperature is fed to the controller using a separate object.
It should be noted that the temperature limit only affects command values for heat-
ing. Thus, the temperature limit requires the controller operating modes "Heating"
or "Heating and cooling".
Effect on Heating, basic level
Heating, additional level
The temperature limit can also be used in a two-level feedback control with basic
and additional levels. It must then be specified here to which level the limit shall
apply. Either the basic level or to the additional level for heating can be limited.
This parameter can only be set in two-level control operation.
Maximum temperature underfloor heat-
ing (20...70 °C)
20...30...70
The maximum limit temperature which the underfloor heating system may reach is
specified here. If this temperature is exceeded, the controller switches the under-
floor heating system off using the command value. As soon as the floor temperat-
ure has fallen 1 K under the limit temperature, the controller switches the com-
mand value on again, assuming that this is intended in the control algorithm.
Hysteresis of limit temperature 1 K
The hysteresis of the floor temperature limit is fixed to "1 K" and cannot be
changed.
11.12 Objects for room temperature
controllers
Object for setpoint temperature specification
Function: Setpoint temperature specification

SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
181 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
320, 391,
462, 533,
604, 675
Basic setpoint Controller x - Input
(x = 1...6)
2 bytes 9,001 C, (R), W,
-, -
2-byte object for external specification of the basic setpoint for relative setpoint
specification. Depending on the operating mode, the possible range of values is
limited by the configured frost protection and/or heat protection temperature. The
controller rounds the temperature values received via the object depending on the
configured interval of the basic setpoint shift (0.1 K or 0.5 K).
The temperature value must always be specified in the format "°C".
Function: Setpoint temperature specification
Object no. Function Name Type DPT Flag
320, 391,
462, 533,
604, 675
Setpoint active op-
erating mode
Controller x - Input
(x = 1...6)
2 bytes 9,001 C, (R), W,
-, -
2-byte object for external setting of a setpoint for absolute setpoint presetting. De-
pending on the operating mode, the possible range of values is limited by the con-
figured frost protection and/or heat protection temperature. The controller rounds
the temperature values received via the object to 0.1 K.
The temperature value must always be specified in the format "°C".
Objects for operating mode change-over
Function: Operating mode switchover
Object no. Function Name Type DPT Flag
322, 393,
464, 535,
606, 677
Operating mode
switchover
Controller x - Input
(x = 1...6)
1 bytes 20,102 C, (R), W,
T, -
1-byte object for change-over of the operating mode of the controller according to
the KNX specification. This object is only available in this way when the operating
mode switchover is to take place over 1 byte (parameter-dependent).
After bus voltage return or an ETS programming operation (controller reset), the
current operating mode is transmitted via this object.
Function: Operating mode switchover
Object no. Function Name Type DPT Flag
322, 393,
464, 535,
606, 677
Comfort mode Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
T, -
1-bit object for change-over to the "Comfort" operating mode. This object is only
available in this way when the operating mode change-over is to take place over
4 x 1 bit (parameter-dependent).
After bus voltage return or an ETS programming operation (controller reset), the
"Comfort" operating mode, if active, is transmitted via this object.
Function: Operating mode switchover
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
182 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
323, 394,
465, 536,
607, 678
Standby mode Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
T, -
1-bit object for change-over to the "Standby" operating mode. This object is only
available in this way when the operating mode change-over is to take place over
4 x 1 bit (parameter-dependent).
After bus voltage return or an ETS programming operation (controller reset), the
"Standby" operating mode, if active, is transmitted via this object.
Function: Operating mode switchover
Object no. Function Name Type DPT Flag
324, 395,
466, 537,
608, 679
Night operation Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
T, -
1-bit object for change-over to the "Night" operating mode. This object is only
available in this way when the operating mode change-over is to take place over
4 x 1 bit (parameter-dependent).
After bus voltage return or an ETS programming operation (controller reset), the
"Night operation" operating mode, if active, is transmitted via this object.
Function: Operating mode switchover
Object no. Function Name Type DPT Flag
325, 396,
467, 538,
609, 680
Frost/ heat protec-
tion
Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
T, -
1-bit object for change-over to the "Frost / heat protection" operating mode. This
object is only available in this way when the operating mode change-over is to
take place over 4 x 1 bit (parameter-dependent).
After bus voltage return or an ETS programming operation (controller reset), the
"Frost / heat protection" operating mode, if active, is transmitted via this object.
Function: Operating mode switchover
Object no. Function Name Type DPT Flag
326, 397,
468, 539,
610, 681
Operating mode
forced-control
Controller x - Input
(x = 1...6)
1 bytes 20,102 C, (R), W,
T, -
1-byte object for forced change-over (highest priority) of the operating mode of the
controller according to the KNX specification. This object is only available in this
way when the operating mode switchover is to take place over 1 byte (parameter-
dependent).
Function: Operating mode change-over presence detection
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
183 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
327, 398,
469, 540,
611, 682
Presence button Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
T, -
1-bit object through which an external presence button (e.g. from a controller ex-
tension) can be linked to the controller (polarity: Presence exists = "1", no pres-
ence exists = "0").
Presence allows permanent switching to Comfort mode (starting in Standby mode)
or temporary switching to this Comfort extension (starting from Night mode or
Frost / heat protection mode).
Presence in Standby mode: If there is a presence, the controller activates Comfort
mode. As soon as the object no longer signals a presence, the controller switches
back to Standby mode.
Presence in Night mode or Frost / heat protection mode: If there is a presence, the
controller activates the Comfort extension. After the configured length of the Com-
fort extension has elapsed, the system automatically switches back to Night mode
or Frost / heat protection mode. In this case, the object value is reset automatic-
ally.
After a bus voltage return or an ETS programming operation (controller reset), the
presence function is always inactive.
This object is only visible if the presence detection is configured to "Presence but-
ton".
Function: Operating mode change-over presence detection
Object no. Function Name Type DPT Flag
327, 398,
469, 540,
611, 682
Presence detector Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
T, -
1-bit object through which an external KNX presence detector can be linked to the
controller (polarity: Presence exists = "1", no presence exists = "0").
If there is a presence, the controller activates Comfort mode, provided that no
higher-level function (e.g. window status) is active. The controller switches to the
last specified operating mode as soon as the presence detector ceases to signal a
presence.
After a bus voltage return or an ETS programming operation (controller reset), the
presence function is always inactive.
This object is only visible if the presence detection is configured to "Presence de-
tector".
Function: Operating mode change-over window status
Object no. Function Name Type DPT Flag
328, 399,
470, 541,
612, 683
Window status Controller x - Input
(x = 1...6)
1-bit 1,019 C, (R), W,
-, -
1-bit object for the coupling of window contacts.
Polarity: Window open = "1", window closed = "0".
Object for operating mode change-over
Function: Operating mode change-over
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
184 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
329, 400,
471, 542,
613, 684
Heating / cooling
change-over
Controller x - Out-
put
(x = 1...6)
1-bit 1,100 C, (R), -,T,
-
1 bit object to transmit the automatically set operating mode of the controller
("Heating" or "Cooling" modes).
Object value "1" = Heating; Object value "0" = Cooling.
After bus voltage return or an ETS programming operation (controller reset), the
current operating mode is transmitted via this object. This object is only available
in this way when the operating mode switchover is to take place automatically
(parameter-dependent).
Function: Operating mode change-over
Object no. Function Name Type DPT Flag
329, 400,
471, 542,
613, 684
Heating / cooling
change-over
Controller x - Input
(x = 1...6)
1-bit 1,100 C, (R), W,
T, -
1 bit object to change-over the operating mode of the controller ("Heating" or
"Cooling" modes). Object value "1" = Heating; Object value "0" = Cooling.
After a bus voltage return or ETS programming operation (controller reset), the ob-
ject value is always "0", irrespective of which operating mode is specified via con-
figuration after a reset. This object is only available in this way when the operating
mode change-over is to take place manually (not automatically by the controller)
(parameter-dependent).
Objects for controller status
Function: Status indication
Object no. Function Name Type DPT Flag
330, 401,
472, 543,
614, 685
KNX status operat-
ing mode
Controller x - Out-
put
(x = 1...6)
1 bytes 20,102 C, (R), -,T,
-
1-byte object used by the controller to output the current operating mode. This ob-
ject is generally used to enable controller extensions to display the controller oper-
ating mode correctly in the KNX compliant status display. Therefore this object
should be connected with controller extensions if the KNX compliant status feed-
back is not configured.
After bus voltage return or an ETS programming operation (controller reset), the
current status is transmitted via this object. This object is only available when
"Controller status" = "KNX-compliant".
Function: Status indication
Object no. Function Name Type DPT Flag
330, 401,
472, 543,
614, 685
Controller status Controller x - Out-
put
(x = 1...6)
1 bytes --- C, (R), -,T,
-
1-byte object used by the controller to output the current state of operation (e. g. to
a controller extension).
After bus voltage return or an ETS programming operation (controller reset), the
current status is transmitted via this object. This object is only available when
"Controller status" = "General controller".
Function: Status indication
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
185 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
330, 401,
472, 543,
614, 685
Controller status ... Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object for single status feedback of configured controller functions. This ob-
ject is only available in this way when a part of the controller status is to be trans-
mitted singly as 1-bit information (parameter-dependent).
After bus voltage return or an ETS programming operation (controller reset), the
current status is transmitted via this object.
Function: Status indication
Object no. Function Name Type DPT Flag
338, 409,
480, 551,
622, 693
KNX status Controller x - Out-
put
(x = 1...6)
2 bytes 22,101 C, (R), -,T,
-
2-byte object that the controller uses to display elementary basic functions in a
KNX-harmonised manner.
After bus voltage return or an ETS programming operation (controller reset), the
current status is transmitted via this object. This object is only available when
"Controller status" = "KNX-compliant".
Function: Status indication
Object no. Function Name Type DPT Flag
338, 409,
480, 551,
622, 693
Status signal addi-
tion
Controller x - Out-
put
(x = 1...6)
1 bytes --- C, (R), -,T,
-
1-byte object used by the controller to output the current enlarged state of opera-
tion (e.g. to a controller extension).
After bus voltage return or an ETS programming operation (controller reset), the
current status is transmitted via this object. This object is only available when
"Controller status" = "General controller".
Function: Status indication
Object no. Function Name Type DPT Flag
339, 410,
481, 552,
623, 694
KNX status forced
oper. mode
Controller x - Out-
put
(x = 1...6)
1 bytes 20,102 C, (R), -,T,
-
1-byte object used by the controller to output the operating mode in the event of
forced position. This object is generally used to enable controller extensions to
display the controller operating mode correctly in the KNX compliant status dis-
play. Therefore this object should be connected with controller extensions if the
KNX compliant status feedback is not configured.
After bus voltage return or an ETS programming operation (controller reset), the
current status is transmitted via this object. This object is only available when
"Controller status" = "KNX-compliant".
Objects for heating / cooling signal functions
Function: Heating energy message
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
186 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
371, 442,
513, 584,
655, 726
Heating indication Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object for the controller to report a request for heating energy. Object value =
"1": energy request, object value = "0": no energy request.
Function: Cooling energy message
Object no. Function Name Type DPT Flag
372, 443,
514, 585,
656, 727
Cooling indication Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object for the controller to report a request for cooling energy. Object value =
"1": energy request, object value = "0": no energy request.
Objects for controller disabling functions
Function: Disable controller
Object no. Function Name Type DPT Flag
355, 426,
497, 568,
639, 710
Disable controller Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
-, -
1-bit object for deactivating the controller (activating dew point operation). Polarity:
Controller deactivated = "1", controller activated = "0". This object is only available
if controller switch-off via the bus is enabled.
Function: Disable controller
Object no. Function Name Type DPT Flag
356, 427,
498, 569,
640, 711
Disable additional
level
Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
-, -
1-bit object for deactivating the additional level of the controller. Polarity:
Additional level deactivated = "1", additional level activated = "0". This object is
only available in this way if two-level heating or cooling operation is configured.
Object for heating command value output and
combined valve heating/cooling
Function: Command value
Object no. Function Name Type DPT Flag
357, 428,
499, 570,
641, 712
Command value for
heating / command
value, basic heating
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the continuous command value of the heating mode. In
two-level heating mode, command value output for the basic heating. This object
is only available in this way if the type of feedback control is configured to "Con-
tinuous PI control".
Function: Command value
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
187 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
357, 428,
499, 570,
641, 712
Command value for
heating (PWM) /
command value,
basic heating
(PWM)
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the PWM command value of the heating mode. In two-level
heating mode, command value output for the basic heating. This object is only
available in this way if the type of feedback control is configured to "Switching PI
control (PWM)".
Function: Command value
Object no. Function Name Type DPT Flag
357, 428,
499, 570,
641, 712
Command value for
heating / command
value, basic heating
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the switching command value of the heating mode. In two-
level heating mode, command value output for the basic heating. This object is
only available in this way if the type of feedback control is configured to "Switching
2-point feedback control".
Function: Command value
Object no. Function Name Type DPT Flag
357, 428,
499, 570,
641, 712
Command value for
heating/cooling /
command value,
basic level
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the combined continuous command value of the heating
and cooling mode. In two-level heating/cooling mode, command value output for
the basic level This object is only available in this way if the command values for
heating and cooling mode are output to a shared object (parameter-dependent).
The type of feedback control must also be configured to "Continuous PI control".
Function: Command value
Object no. Function Name Type DPT Flag
357, 428,
499, 570,
641, 712
Command value for
heating/cooling
(PWM) / command
value, basic level
(PWM)
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the combined PWM command value of the heating and cool-
ing mode. In two-level heating/cooling mode, command value output for the basic
level This object is only available in this way if the command values for heating
and cooling mode are output to a shared object (parameter-dependent). The type
of feedback control must also be configured to "Switching PI control (PWM)".
Function: Command value
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
188 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
357, 428,
499, 570,
641, 712
Command value for
heating/cooling /
command value,
basic level
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the combined switching command value of the heating and
cooling mode. In two-level heating/cooling mode, command value output for the
basic level This object is only available in this way if the command values for heat-
ing and cooling mode are output to a shared object (parameter-dependent). The
type of feedback control must also be configured to "Switching 2-point feedback
control".
Object for command value output, additional heating
and combined valve additional heating/cooling
Function: Command value
Object no. Function Name Type DPT Flag
358, 429,
500, 571,
642, 713
Command value
additional heating
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the continuous command value for additional heating in
two-level operation. This object is only available in this way if the type of feedback
control is configured to "Continuous PI control".
Function: Command value
Object no. Function Name Type DPT Flag
358, 429,
500, 571,
642, 713
Command value
additional heating
(PWM)
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the continuous PWM command value for additional heating
in two-level operation. This object is only available in this way if the type of feed-
back control is configured to "Switching PI control (PWM)".
Function: Command value
Object no. Function Name Type DPT Flag
358, 429,
500, 571,
642, 713
Command value
additional heating
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-byte object to output the switching command value for additional heating in two-
level operation. This object is only available in this way if the type of feedback con-
trol is configured to "Switching 2-point feedback control".
Function: Command value
Object no. Function Name Type DPT Flag
358, 429,
500, 571,
642, 713
Command value
additional level
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the combined continuous command value for additional
level in two-level operation. This object is only available in this way if the com-
mand values for heating and cooling mode are output to a shared object (para-
meter-dependent). The type of feedback control must also be configured to "Con-
tinuous PI control".
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
189 | MTN6730-0002 11.08.2020
Function: Command value
Object no. Function Name Type DPT Flag
358, 429,
500, 571,
642, 713
Command value
additional level
(PWM)
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the combined switching PWM command value for additional
level in two-level operation. This object is only available in this way if the com-
mand values for heating and cooling mode are output to a shared object (para-
meter-dependent). The type of feedback control must also be configured to
"Switching PI control (PWM)".
Function: Command value
Object no. Function Name Type DPT Flag
358, 429,
500, 571,
642, 713
Command value
additional level
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the combined switching command value for additional level in
two-level operation. This object is only available in this way if the command values
for heating and cooling mode are output to a shared object (parameter-depend-
ent). The type of feedback control must also be configured to "Switching 2-point
feedback control".
Object for command value output, cooling
Function: Command value
Object no. Function Name Type DPT Flag
359, 430,
501, 572,
643, 714
Command value
cooling / Command
value basic cooling
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the continuous command value of the cooling mode. In
two-level cooling mode, command value output for the basic cooling. This object is
only available in this way if the type of feedback control is configured to "Continu-
ous PI control".
Function: Command value
Object no. Function Name Type DPT Flag
359, 430,
501, 572,
643, 714
Command value
cooling (PWM) /
Command value
basic cooling
(PWM)
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the PWM command value of the cooling mode. In two-level
cooling mode, command value output for the basic cooling. This object is only
available in this way if the type of feedback control is configured to "Switching PI
control (PWM)".
Function: Command value
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
190 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
359, 430,
501, 572,
643, 714
Command value
cooling / Command
value basic cooling
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the switching command value of the cooling mode. In two-
level cooling mode, command value output for the basic cooling. This object is
only available in this way if the type of feedback control is configured to "Switching
2-point feedback control".
Object for command value output, additional cooling
Function: Command value
Object no. Function Name Type DPT Flag
360, 431,
502, 573,
644, 715
Command value
additional cooling
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the continuous command value for additional cooling in
two-level operation. This object is only available in this way if the type of feedback
control is configured to "Continuous PI control".
Function: Command value
Object no. Function Name Type DPT Flag
360, 431,
502, 573,
644, 715
Command value
additional cooling
(PWM)
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-bit object to output the continuous PWM command value for additional cooling in
two-level operation. This object is only available in this way if the type of feedback
control is configured to "Switching PI control (PWM)".
Function: Command value
Object no. Function Name Type DPT Flag
360, 431,
502, 573,
644, 715
Command value
additional cooling
Controller x - Out-
put
(x = 1...6)
1-bit 1,001 C, (R), -,T,
-
1-byte object to output the switching command value for additional cooling in two-
level operation. This object is only available in this way if the type of feedback con-
trol is configured to "Switching 2-point feedback control".
Object for additional PWM heating command value
output and combined valve PWM additional heating/
cooling
Function: Command value
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
191 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
361, 432,
503, 574,
645, 716
PWM command
value for heating /
PWM command
value, basic heating
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the internal continuous command value of a PWM control-
ler of the heating mode. In two-level heating mode, command value output for the
basic heating. This object is only available in this way if the type of feedback con-
trol is configured to "Switching PI control (PWM)". In addition to the switching 1 bit
command value of the PWM, the calculated continuous command value of the
controller can also be transmitted to the bus and displayed, e.g. in a visualisation.
Function: Command value
Object no. Function Name Type DPT Flag
361, 432,
503, 574,
645, 716
PWM command
value for heating/
cooling / PWM
command value,
basic level
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the combined continuous command value of a PWM con-
troller of the heating and cooling mode. In two-level heating/cooling mode, com-
mand value output for the basic level This object is only available in this way if the
command values for heating and cooling mode are output to a shared object
(parameter-dependent). The type of feedback control must also be configured to
"Switching PI control (PWM)". In addition to the switching 1 bit command value of
the PWM, the calculated continuous command value of the controller can also be
transmitted to the bus and displayed, e.g. in a visualisation.
Object for additional command value output, PWM
additional heating and combined valve PWM
additional heating/cooling
Function: Command value
Object no. Function Name Type DPT Flag
362, 433,
504, 575,
646, 717
PWM com. value,
add. heating
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the internal continuous command value of a PWM control-
ler for additional heating in two-level operation. This object is only available in this
way if the type of feedback control is configured to "Continuous PI control". In ad-
dition to the switching 1 bit command value of the PWM, the calculated continuous
command value of the controller can also be transmitted to the bus and displayed,
e.g. in a visualisation.
Function: Command value
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
192 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
362, 433,
504, 575,
646, 717
PWM command
value additional
level
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the combined continuous command value of a PWM feed-
back controller for additional level in two-level operation. This object is only avail-
able in this way if the command values for heating and cooling mode are output to
a shared object (parameter-dependent). The type of feedback control must also
be configured to "Switching PI control (PWM)". In addition to the switching 1 bit
command value of the PWM, the calculated continuous command value of the
controller can also be transmitted to the bus and displayed, e.g. in a visualisation.
Object for additional command value output, PWM
cooling
Function: Command value
Object no. Function Name Type DPT Flag
363, 434,
505, 576,
647, 718
PWM command
value cooling /
PWM command
value basic cooling
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the internal continuous command value of a PWM feed-
back controller of the cooling mode. In two-level cooling mode, command value
output for the basic cooling. This object is only available in this way if the type of
feedback control is configured to "Switching PI control (PWM)". In addition to the
switching 1 bit command value of the PWM, the calculated continuous command
value of the controller can also be transmitted to the bus and displayed, e.g. in a
visualisation.
Object for additional command value output, PWM
additional cooling
Function: Command value
Object no. Function Name Type DPT Flag
364, 435,
506, 577,
648, 719
PWM com. value,
add. cooling
Controller x - Out-
put
(x = 1...6)
1 bytes 5,001 C, (R), -,T,
-
1-byte object to output the internal continuous command value of a PWM feed-
back controller for additional cooling in two-level operation. This object is only
available in this way if the type of feedback control is configured to "Switching PI
control (PWM)". In addition to the switching 1 bit command value of the PWM, the
calculated continuous command value of the controller can also be transmitted to
the bus and displayed, e.g. in a visualisation.
Object for outputting the setpoint temperature
Function: Set temperature
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
193 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
334, 405,
476, 547,
618, 689
Set temperature Controller x - Out-
put
(x = 1...6)
2 bytes 9,001 C, R, -,T, -
2-byte object for the output of the current temperature setpoint. Depending on the
operating mode, the possible range of values is limited by the configured frost pro-
tection and/or heat protection temperature.
The temperature value is always output in the format "°C".
After bus voltage return or an ETS programming operation (controller reset), the
current setpoint temperature is transmitted via this object.
Object for basic setpoint shift (only for relative
setpoint presetting)
Function: Basic setpoint shift
Object no. Function Name Type DPT Flag
336, 407,
478, 549,
620, 691
Current setpoint
shifting
Controller x - Out-
put
(x = 1...6)
1 bytes 6,010 C, R, -,T, -
1-byte object for giving feedback on the current setpoint shift for evaluation, e.g.
by a controller extension. The value of a counter value in the communication ob-
ject is dependent on the parameter "Setpoint shift step width" and is either 0.1 or
0.5 K. The value "0" means that no shift is active. The value is depicted in a
double complement in the positive and negative direction.
After bus voltage return or an ETS programming operation (controller reset), the
current value for the basic setpoint shift is transmitted via this object. Since the
value for the basic setpoint shift is stored exclusively in volatile memory, the shift
is always "0" immediately after a bus voltage return or an ETS programming oper-
ation.
This object is only available in this way if relative setpoint presetting is configured.
Function: Basic setpoint shift
Object no. Function Name Type DPT Flag
337, 408,
479, 550,
621, 692
Preset setpoint
shifting
Controller x - Input
(x = 1...6)
1 bytes 6,010 C, (R), W,
-, -
1-byte object for setting a basic setpoint shifting, e.g. via a controller extension.
The value of a counter value in the communication object is dependent on the
parameter "Setpoint shift step width" and is either 0.1 or 0.5 K. The value "0"
means that no shift is active. The value is depicted in a double complement in the
positive and negative direction.
In case the limits of the value range are exceeded by the preset external value,
the controller will automatically reset the received value to the minimum and max-
imum limits.
This object is only available in this way if relative setpoint presetting is configured.
Object for detecting the outdoor temperature
Function: Outdoor temperature
SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
194 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
340, 411,
482, 553,
624, 695
Outdoor temperat-
ure
Controller x - Input
(x = 1...6)
2 bytes 9,001 C, (R), W,
-, -
2-byte object for detecting the outdoor temperature The received value is used
solely for limiting the setpoint temperature in cooling mode.
Possible range of values: -99.9 °C to +99.9°C.
The temperature value must always be specified in the format "°C".
Object for limiting the setpoint temperature
Function: Setpoint temperature limit
Object no. Function Name Type DPT Flag
341, 412,
483, 554,
625, 696
Limit of cooling set-
point temperature
Controller x - Input
(x = 1...6)
1-bit 1,001 C, (R), W,
-, -
1-bit object for activating the setpoint temperature limit. Polarity:
Setpoint temperature limit ON = "1"; Setpoint temperature limit OFF = "0".
This communication object is only available when the setpoint temperature limit in-
tends activation via an object.
Object for limiting the floor temperature
Function: Floor temperature limitation
Object no. Function Name Type DPT Flag
367, 438,
509, 580,
651, 722
Floor temperature Controller x - Input
(x = 1...6)
2 bytes 9,001 C, (R), W,
-, -
2-byte object for coupling an external temperature sensor for floor temperature
limitation.
The temperature value must always be specified in the format "°C".
Objects for room temperature measurement
Funktion: Room temperature measurement
Object no. Function Name Type DPT Flag
381, 452,
523, 594,
665, 736
Actual-temperature Controller x - Out-
put
(x = 1...6)
2 bytes 9,001 C, R, -,T, -
2-byte object for the display of the actual temperature active in the controller
(room temperature). The possible temperature range is specified by the received
temperature values and corresponds to the range specified by the KNX DPT
9.001.
The temperature value is always output in the format "°C".
Funktion: Room temperature measurement

SpaceLogic KNX Valve Drive Controller Objects for room temperature controllers
195 | MTN6730-0002 11.08.2020
Object no. Function Name Type DPT Flag
382, 453,
524, 595,
666, 737
Received temperat-
ure 1 (temperature
sensor 1)
Controller x - Input
(x = 1...6)
2 bytes 9,001 C, (R), W,
-, -
2-byte object for coupling an external KNX temperature sensor (e.g. push-button
sensor with temperature measurement) for room temperature detection. The pos-
sible temperature range is specified by the KNX DPT 9.001.
The temperature value must always be specified in the format "°C".
Funktion: Room temperature measurement
Object no. Function Name Type DPT Flag
383, 454,
525, 596,
667, 738
Received temperat-
ure 2 (temperature
sensor 2)
Controller x - Input
(x = 1...6)
2 bytes 9,001 C, (R), W,
-, -
2-byte object for coupling a further external KNX temperature sensor (e.g. push-
button sensor with temperature measurement) for room temperature detection.
Thus cascading of multiple temperature sensors for room temperature measure-
ment. The possible temperature range is specified by the KNX DPT 9.001.
The temperature value must always be specified in the format "°C".
This communication object is only available when the second temperature sensor
is enabled.
